

Тема 3.1 Основні принципи роботи тиристорних перетворювачів еп пс верстатів з чпк та ртк.
1.Система імпульсно-фазового управління.
2.Будова.
3.Принцип дії.
4.Операційний підчилювач. Диференційний підсилювач.
5.Відємний зворотній зв’язок в [ВЗЗ][оос]в операційному підсилювачі.
6.Додатній зворотній зв’язок в [ВЗЗ][оос]в операційному підсилювачі.
СІФУ-система управління, в якій керуючі імпульси виходять без синхронізації вузлів системи керування напругою мережі змінного тока.Фазосдвігающее пристрій, принципово необхідний для синхронних систем, тут відсутня.
Необхідний кут управління тиристорами в СІФУ створюється як результат регулювання інтервалів між імпульсами в замкнутій системі з перетворювачем або його навантаженням.
СІФУ застосовують при істотних спотвореннях напруги живильної сеті.Наіболее поширені СІФУ в перетворювачах, що споживають потужність, порівнянну з потужністю джерела живлення.
Переваги:
-забезпечує достатню для вмиканя тиристорів амплітудну напругу і струму імпульсів керування;
-забезпечує високу крутизну фронтів імпульсів керування;
-забезпечує регулювання значення у заданому діапазоні;
-забезпечує симетрію імпульсів керування по фазах випрямляча;
-забезпечує достатню для надійного вмикання тиристорів тривалість імпульсів керування;
-має високу завадостійкість.
Операційний підсилювач [ОП].
Назва операційний підсилювач (ОП) було дано спочатку підсилювачам з великим коефіцієнтом підсилення які використовувались для виконання математичних операцій сумування , множення ,та ділення .Це були в загальному лампові підсилювачі які працювали при великих напругах . Від них і взяв свою назву сучасний інтегральний операційний підсилювач.

Рисунок 1 Схема підключення Операційного підсилювача.
Інтегральний операційний підсилювач має такі наступні властивості:
-Симетрію двох диференційних виводів;
-Нульову напругу на виході при відсутності сигналів на входах
-Великі коефіцієнти підсилення по напрузі ,струму, і потужності (в ідеальному випадку нескінченність).
-Велика полоса пропускання , починаючи з від постійного струму (в ідеальному випадку нескінченність).
-Великий вхідний опір (в ідеальному випадку нескінченність).
-Малий вхідний опір(в ідеальному випадку нуль).
Такі непогані властивості які були йому наданні розробниками ,дозволяють операційному підсилювачу працювати схемотехнічною основою різного типу схем властивості яких визначаються підключенням до них зовнішніх компонентів а не окремо операційного підсилювача.
На принципових схемах операційний підсилювач в загальному випадку позначається зображається в вигляді трикутника або прямокутника:
-Операційний підсилювач має п’ять основних видів
-Додатне значення напруги живлення +Uп
-Від’ємне значення напруги живлення -Uп
-Інвертуючий вихід (-)
-Неінвертуючий вихід (+)
-Вихід (-)

Рисунок 2 Реакція ОП при подачі вхідного сигналу на неінвертуючий вхід.
Останні виводи являються додатковими і використовуються для під єднання елементів корекції які вказані в паспортних даних кожного операційного підсилювача .
Рисунок 3 Реакція операційного підсилювача при подачі вхідного сигналу на інвертуючий вхід.
Слід відмітити не те що для живлення операційного підсилювача використовується джерело з розчипленним живленням , при цьму земля (загальна точка) не підєднанна до операційного підсилювача
Полярність напруги на виході операційного підсилювача залежить від різниці напруг на виході підсилювача
![]() де
Ко-Коефіцієнт підсилення по напрузі в
схемі включення без зворотного зв’язку.
де
Ко-Коефіцієнт підсилення по напрузі в
схемі включення без зворотного зв’язку.
Uвх+ - Напруга на не інвертованому виході
Uвх- - Напруга на інвертованому виході.

Рисунок 4 Вплив зміщення на форму вихідної напруги
2.Відємний зворотній зв’язок в [ВЗЗ][оос]в операційному підсилювачі.
Обхват операційного підсилювача з від’ємним зворотнім зв’язком дозволяє отримати схему, коефіцієнт передачі який визначається зовнішніми елементами ,приєднаними до оперативного підсилювача і не залежать від коефіцієнта підсилення Ко самого операційного підсилювача.
Отримати розрахункову формулу для отримання коефіцієнта передачі такої схеми можна отримати двома шляхами .
На основі співвідношення між напругами які протікають в схемі
Між струмами які протікають в схемі .
Аналіз на основі струмових співвідношень.
Оскільки
напруга між входами (-) та (+) практично
рівне нулю то можливо враховувати що
вхід (-) потенційно заземлений, і відповідно
вся вхідна напруга прикладена до R1 Тоді
![]() Весь вхідний струм протікає через
опір Rос ,так як операційний підсилювач
струму споживає (Rвх→∞) Відповідно
Весь вхідний струм протікає через
опір Rос ,так як операційний підсилювач
струму споживає (Rвх→∞) Відповідно
![]() .Один
вивід Rос приєднаний до виходу ,а другий
кінець до потенційно заземленому
входу(-), тому
.Один
вивід Rос приєднаний до виходу ,а другий
кінець до потенційно заземленому
входу(-), тому
![]()
І
так ми маємо
![]() знак „мінус” враховує різні полярності
напруг Uвх Uвих
знак „мінус” враховує різні полярності
напруг Uвх Uвих
Звідси
коефіцієнт передачі схеми
![]() тобто не залежить від самих параметрів
операційного підсилювача.
тобто не залежить від самих параметрів
операційного підсилювача.
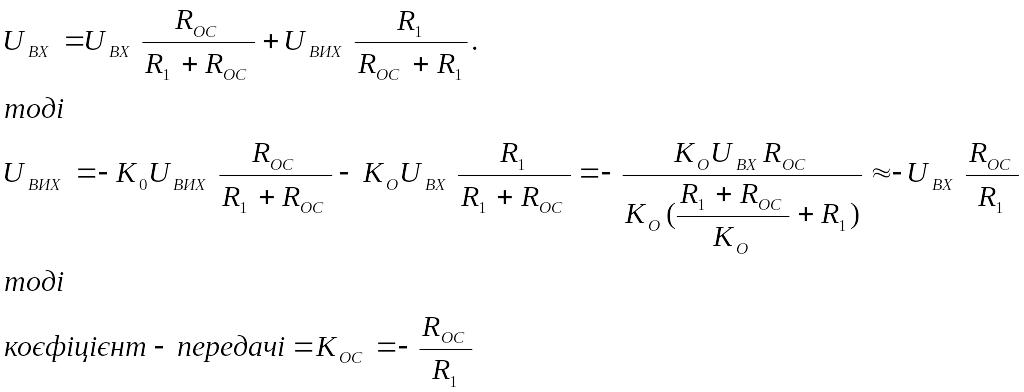
Аналіз на основі співвідношення напруг.
В загальному випадку напруга операційного підсилювача рівне
![]()
В нашому випадку Uвх+=0, Uвх- складається з двох складових :частини напруги Uвх яка знімається з розподільника напруги R1 Rос і частини вихідної напруги Uвих яка подається через ланцюг зворотного зв’язку на вихід. Величина Uвих
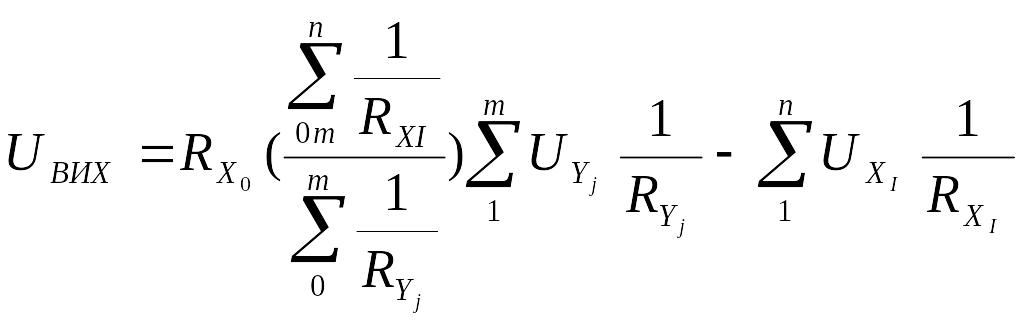
нижче проводиться аналогічним способом залежність вихідної напруги від вхідних для загального диференційного операційного підсилювача
Додатній зворотній зв’язок в [ВЗЗ][оос]в операційному підсилювачі.
Додатній зворотній зв’язок здійснюється шляхом подачі вихідної напруги на неінертний вхід .Ця напруга являється своєрідною „опорною ” завдяки якій досягається „гістерезіс ” в вихідній характеристиці оперативного підсилювача.
Таким чином додатній зворотній зв’язок дає ефект тригера Шмідта і позитивно сказується при роботі з сигналами які мають велику амплітуду шумів , то повністю виключається ложне спрацювання схеми.
Приєднавши в ланцюг додатній зворотній зв’язок діод можливо отримати односторонню гістерезисну характеристику.
Лекція