

2. Автоматичне регулювання
швидкості і моменту в системі джерело струму — двигун
Розглянемо схеми автоматичного регулювання моменту з живленням якірного ланцюга від джерела струму, в якому заданий струм, не залежний від ЕРС і опори навантаження (припустимо І =Іном )- Обмотка збудження двигуна одержує живлення від джерела регульованої напруги, полярність якого можна змінювати. Механічні характеристики такого приводу є вертикальними прямими лініями (Рисунок.1), тобто є абсолютно м'якими (момент не залежить від кутової швидкості), а їх положення (значення моменту) визначається магнітним потоком, оскільки М =кФІ=кІномФ=к1Ф
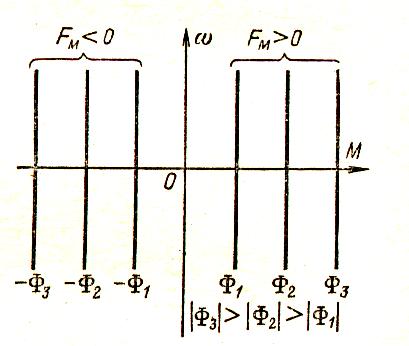
Рис1. Механічні характеристики приводу по системі джерело струму — двигун.
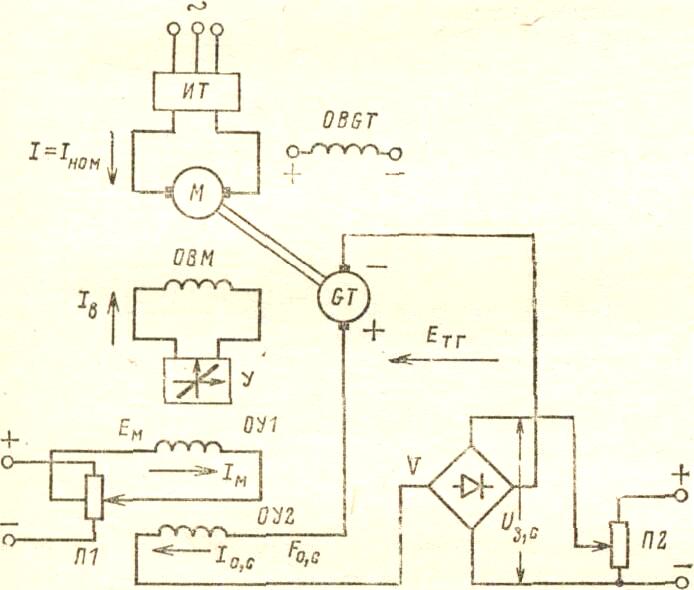
Застосування зворотних зв'язків в схемі джерело струму — двигун дозволяє сформувати з вертикальних характеристик будь-які характеристики. Таким прикладом являться схема, приведена на Рисунок.2
Тут
якір двигуна М підключений до джерела
струму ИТ, а обмотка збудження ОВМ
приєднана до підсилювача У з лінійною
характеристикою, на вході якого дві
обмотки управління. Одна з них ОУ1 одержує
живлення від потенціометра П1 і призначена
для створення сигналу, пропорційного
потоку
![]() (завдання
моменту), інша ОУ2 — обмотка негативного
зворотного зв'язку по швидкості з
сигналом
(завдання
моменту), інша ОУ2 — обмотка негативного
зворотного зв'язку по швидкості з
сигналом
![]() направленим НА зустріч сигналу FM. Обмотка
зворотного зв'язку ОУ2 приєднана до
тахогенератора GT через потенціометр
П2 і випрямляч V так, що сигнал, пропорційний
швидкості, з'являється на ній тоді, коли
направленим НА зустріч сигналу FM. Обмотка
зворотного зв'язку ОУ2 приєднана до
тахогенератора GT через потенціометр
П2 і випрямляч V так, що сигнал, пропорційний
швидкості, з'являється на ній тоді, коли
![]() Змінюючи за допомогою потенціометра
П2 задаюча напруга U3 можна регулювати
відсічення зворотного зв'язку по
швидкості, оскільки вентилі V пропускають
струм Іот тільки у тому випадку, коли
напруга GT перевершує U3
Змінюючи за допомогою потенціометра
П2 задаюча напруга U3 можна регулювати
відсічення зворотного зв'язку по
швидкості, оскільки вентилі V пропускають
струм Іот тільки у тому випадку, коли
напруга GT перевершує U3
Вважаючи, що магнітний потік лінійно залежить від струму збудження
(Ф = kBIB). одержуємо (при I=Iном)
![]()
де kу — коефіцієнт посилення підсилювача У.
Поки не діє зворотний зв'язок по швидкості (система розімкнена), двигун розвиває постійний момент, пропорційний сигналу, залежному тільки від FM (Рисунок.1). За допомогою потенціометра П1 (Рисунок.2) можна змінювати напрям струму в обмотці управління ОУ1, отже, змінювати знак моменту.
Якщо вступає в дію зворотний зв'язок по швидкості F0.c>0 результуючий сигнал FΣ стає меншим, а разом з ним зменшується і момент. ює в режимі джерела струму, — перетворювач індуктивно-місткості (ІЄП). Схема приводу з таким перетворювачем показана на Рисунок.6.10. Перетворювач індуктивно-місткості складається з трьох однакових реакторів з індуктивністю і трьох конденсаторів з опором місткості хс' Крапки А, В і З приєднані до живлячої сіті змінного струму, а а, Ь і з до входу некерованого випрямляча, навантаженням якого є двигун постійного струму незалежного збудження. Рисунок.6.10. Принципова схема електроприводу з ІЄП.
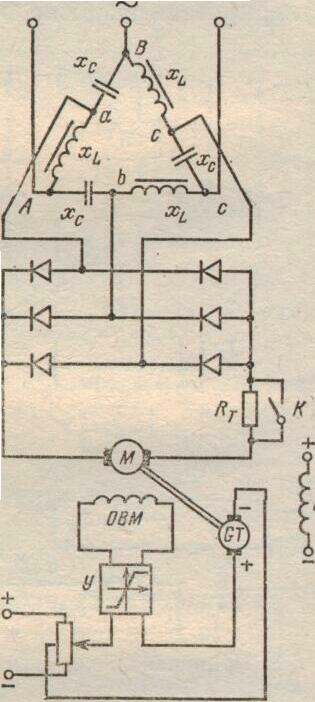
Система забезпечує високу стабільність і плавність регулювання кутової швидкості.
До недоліків схеми слід віднести неможливість отримання рекуперативного гальмування; гальмування здійснюється противовключеннм, для чого служить обмежуючий резистор /. Регулювання моменту обмежено
значенням (1 — 1,2) ЛТ„ом в результаті 'насыщения магнітної системи. Система володіє невисокою швидкодією унаслідок незначної перевантажувальної здатності двигуна і у зв'язку з тим, що управління перехідними процесами переноситься в ланцюг збудження.
Лекція