

2. Система автоматичного регулювання кутової швидкості з жорстким негативним зворотним зв'язком по кутовій швидкості двигуна
Принцип дії жорсткого зворотного зв'язку по кутовій швидкості (Рисунок.2, а) полягає в наступному. Із зростанням навантаження на валу двигуна зменшується його кутова швидкість і знижується сигнал з тахогенератора GT, що знаходиться на одному валу з двигуном М; напруга, що знімається з якоря тахогенератора, пропорційно кутової швидкості двигуна. Оскільки задаючий сигнал залишається при цьому постійним, то сигнал на вході підсилювача У при пониженні кутової швидкості зростає, отже, зростає ЕРС перетворювача П, що автоматично приводить до компенсації падіння кутової швидкості приводу.
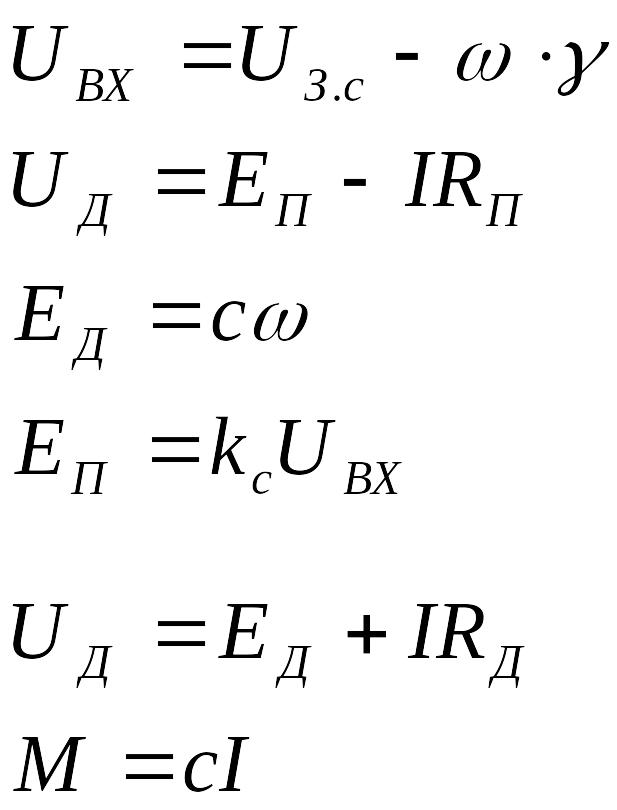
Складемо для схеми на Рисунок.3, а систему рівнянь:
 (4)
(4)
тут Uзс задаюча напруга в системі із зворотним зв'язком по швидкості;
![]() —
коефіцієнт
передачі зворотного зв'язку по швидкості.
—
коефіцієнт
передачі зворотного зв'язку по швидкості.
Вся решта позначень така ж, як і для розглянутих вище схем.
Після відповідних перетворень отримаємо рівняння для механічної характеристики в замкнутій системі регулювання:
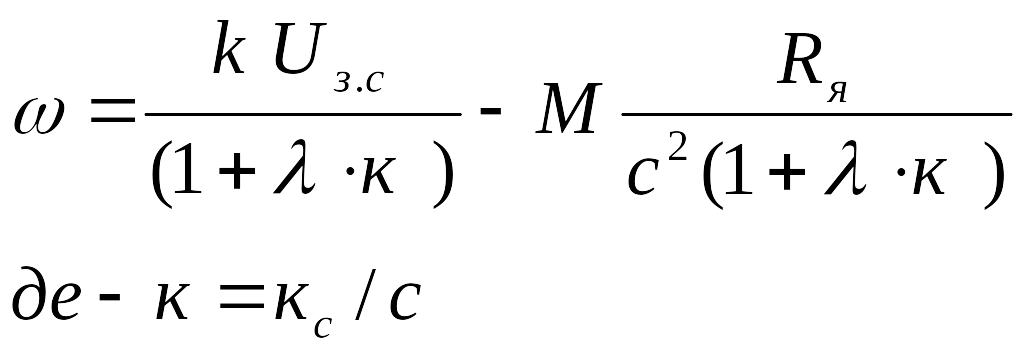 (5)
(5)
коефіцієнт передачі (посилення) всієї системи; RЯ =RП +RД
При постійному коефіцієнті передачі к механічні характеристики двигуна лінійні.
Видно, що, як і в попередніх випадках, перший член правої частини
рівняння (5) визначає кутову швидкість ідеального холостого ходу двигуна, а другий член — падіння кутової швидкості, обумовлене зміною моменту навантаження. В даній системі аналогічно першому розглянутому випадку задаюча напруга в замкнутій системі вище чим в розімкненій.

Рис 2. Структурна схема системи автоматичного регулювання кутової швидкості з жорстким негативним зворотним зв'язком по кутовій швидкості (а) і характеристики двигуна (б).
Статизм в цій системі регулювання визначиться по формулі (при М = Мном)
![]() (6)
(6)
З (6) витікає, що статнзм може бути скільки завгодно малим із зростанням коефіцієнта передачі всієї системи. Тому в системі з негативним зворотним зв'язком по швидкості можна при великому коефіцієнті передачі отримати значний діапазон регулювання. На мал.2.б приведені: гранична характеристика 1 при k- оо, характеристики 2, 2' при кінцевому значенні коефіцієнта передачі (посилення) системи і характеристика двигуна в розімкненій системі 3.
Застосування комбінованих зворотних зв'язків розширює можливості електричного приводу відносно діапазону регулювання, наприклад можливо поєднання жорстких негативному зворотному зв'язку по напрузі з позитивною по струму або негативному зворотному зв'язку по кутовій швидкості з позитивною по струму. Подібного ж вигляду зворотні зв'язки можуть бути застосований в системах приводу змінного струму.
Як перетворювач П в розглянутих системах можуть бути використані різні пристрої: асинхронний двигун — генератор, керований випрямляч, магнітний підсилювач, широтно-імпульсний перетворювач і т.п.
Слід зазначити, що збільшення коефіцієнта посилення в розглянутих системах обмежено їх динамічною стійкістю і чутливістю до перешкод. При великих коефіцієнтах посилення доводиться вводити додаткові коректуючі пристрої, або стабілізуючі зворотні зв'язки (звичайно гнучкі негативні), які роблять систему стійкої і забезпечують бажану якість (час процесу, перерегулювання, коливальна процесу) перехідних процесів в системі (зміна завдання по швидкості, сброс—наброс навантаження і т. п.). Обмеження на коефіцієнт посилення системи зумовлює і обмеження на діапазон регулювання. Так, для системи із зворотним зв'язком по швидкості, володіючою якнайкращою стабільністю при всіх можливих обуреннях (зміна потоку двигуна, навантаження, температури обмоток, напруги сіті і т. п.) серед розглянутих систем, найбільший діапазон регулювання складає близько 2000:1.
Лекція
1.Автоматичне регулювання моменту електроприводу в системі перетворювач — двигун
2. Автоматичне регулювання швидкості і моменту в системі джерело струму — двигун
Для автоматичного регулювання моменту приводу постійного струму незалежного збудження може бути використаний так званий нелінійний жорсткий негативний зворотний зв'язок по струму, або зв'язок з відсіченням.
Спрощена принципова схема, в якій разом з жорстким негативним зворотним зв'язком по кутовій швидкості є ще жорсткий негативний зворотний зв'язок по струму з відсіченням, показана на рис.1
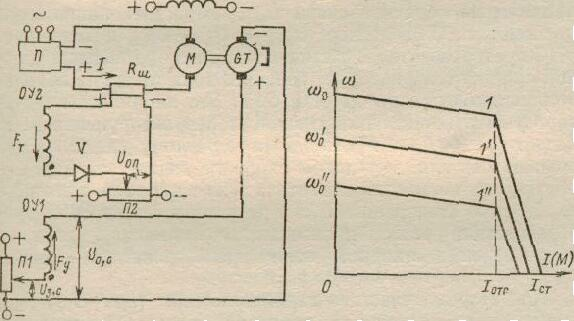
Рис 1, Принципова схема системи автоматичного регулювання кутової швидкості з жорстким негативним зворотним зв'язком по швидкості і жорстким негативним зворотним зв'язком по струму з відсіченням.
Рис2. Механічні характеристики двигуна, що працює в системі з негативними зворотними зв'язками по кутовій швидкості і по струму з відсіченням.
Негативний зворотній звязок по швидкості діє на першій ділянці характеристики двигуна (Рис 2), коли струм навантаження не досягає струму відсікання (I≤Iвід) і на другому — при (I ≥Iвід)
Негативний зворотний зв'язок по струму з відсіченням починає діяти тоді, коли струм якоря двигуна перевищує струм відсічення. Вступаючи в дію, цей зворотний зв'язок дозволяє системі забезпечувати з визначеною
точністю підтримка постійності струму або моменту.
(при Ф=const).
На
схемі.1 перетворювач П (наприклад,
магнітний або електромашинний підсилювач
або тиристорний випрямляч з проміжним
магнітним підсилювачем) має дві обмотки
управління: одна ОУ1, сигнал управління
якої пропорційний різниці задаючого
сигналу U3, що знімається з потенціометра
П1, і сигналу негативного зворотного
зв'язку по швидкості U,,с знімається з
тахогенератора GT, і інша обмотка ОУ2,
включена через діод V на різницю опорної
напруги Uоп що знімається з потенціометра
П2, і падіння напруги на шунті Rш
пропорційного струму якоря двигуна М.
Різниця цих напруг при протіканні
струму I >Iотс створює в МРС FT, направлену
на зустріч МДС Fу, . При струмах, менших
струму відсічення, в обмотці ОУ2 струм
не протікає (через діод V і відповідним
чином підібраного значення опорної
напруги) і система працює тільки із
зворотним зв'язком по швидкості відповідно
характеристикам на ділянках
![]() або
або
![]() (рис 2). , відповідаючим різним задаючим
напругам, що знімаються з потенціометра
П1. У міру збільшення струму навантаження
кутова швидкість двигуна падає,
зменшується напруга зворотного зв'язку
U0.c зростає напруга на обмотці ОУ1, рівне
(рис 2). , відповідаючим різним задаючим
напругам, що знімаються з потенціометра
П1. У міру збільшення струму навантаження
кутова швидкість двигуна падає,
зменшується напруга зворотного зв'язку
U0.c зростає напруга на обмотці ОУ1, рівне
![]() і зростає ЕРС перетворювача, частково
компенсуючи падіння кутової швидкості.
і зростає ЕРС перетворювача, частково
компенсуючи падіння кутової швидкості.
При
струмах, більших струму відсічення,
з'являється напруга на обмотці ОУ2. Ця
напруга викликає розмагнічуючий сигнал,
і результуюча МДС падає (![]() ),
приводячи до різкого падіння ЕРС
перетворювача і кутової швидкості
двигуна. При нерухомому стані двигуна
в його якірному ланцюзі протікає струм
стопоріння Іст а результуюча ЕРС
перетворювача рівна сумі стопорного
струму на опір якірного ланцюга
перетворювач — двигун.
),
приводячи до різкого падіння ЕРС
перетворювача і кутової швидкості
двигуна. При нерухомому стані двигуна
в його якірному ланцюзі протікає струм
стопоріння Іст а результуюча ЕРС
перетворювача рівна сумі стопорного
струму на опір якірного ланцюга
перетворювач — двигун.
Змінюючи UОП можна міняти струм, при якому вступає в дію негативний зворотний зв'язок по струму, отже, змінювати граничний момент.