

2.Структурна схема системи імпульсно-фазового управління.
Структурна схема СІФУ для керування тиристором одної фази представленна на рисунку . Вона складається з фазорушійного пистрою ФСУ і підсилювача формувача імпульсів ПФІ. ФСУ складається з блоків опорного навантаження БОН вузла сумування опорного навантаження з вхідною керуємою напругою і нуль ом органа НО Формування опрного навантаження жорстко прив’язано по фазі до напруги живлючої мережі . Напруга з виходу вузла сумування подається на вхід НО який формує імпульс в момент порівняння напруг Uоп і Uупр або в момент проходження через нуль сума марної напруги .Далі цей імпульс після підсилення і формування подається на керує мий електрод тиристора длля його відкривання . Керуємі імпульси повинні мати достатню потужність і високу закрученість ,необхідну для чіткого відкриття тиристорів. Струм в імпульсі повинен перевищувати струм керування випрямлення тиристора а довжина імпульса повинна перевищувати час наростання силового струму тиристора до величини струму утримання
Лекція
Автоматичне регулювання кутової швидкості і моменту електроприводів
1.Загальні положення
2 .Система автоматичного регулювання кутової швидкості з жорстким від’ємним зв’язком по напрузі.
1.Загальні положення
Раніше було показано, що в розімкнених системах регулювання унаслідок значного перепаду кутової швидкості при зміні навантаження на валу двигуна не вдається отримати великого діапазону регулювання кутової швидкості і забезпечити високу точність регулювання.
В розімкненій системі , при заданому сигналі на вході (наприклад, струмі збудження двигуна постійного струму, живленого від сіті, або струмі збудження генератора в системі Г—Д) вихідна величина — кутова швидкість визначається параметрами двигуна, і навантаженням на його валу, і її зміна не компенсується при різних збуреннях, які практично завжди існують.
Параметри двигуна, а також і навантаження, обумовлене роботою механізму, можуть змінюватися внаслідок зміни опору обмоток двигуна, режиму роботи механізму і т.д.
Тому в таких системах діапазон і точність регулювання кутової швидкості не високий.
В розімкненій системі також не можна отримати високої точності підтримки моменту, що розвивається приводом.
Для розширення діапазону регулювання і підвищення точності використовуються замкнуті системи регулювання. Ідея замкнутих систем регулювання зводиться до того, що в системі автоматично компенсується дія збурюючих чинників і кутова швидкість або момент двигуна можуть з більшою точністю підтримуватися на необхідному рівні. Останнє пояснюється Рисунок.1.
Тут тонкими лініями показані механічні характеристики двигуна в розімкненій системі ” перетворювач двигун”, наприклад в системі Г—Д.
При заданій кутовій швидкості ідеального холостого ходу ω0 підтримка кутової швидкості на необхідному рівні при зміні навантаження може бути досягнута завдяки моменту М1 якщо збільшити ЕРС генератора від значення Еr3 до Еr2 так, щоб компенсувати падіння кутової швидкості на значення Δω1 і отримати значення кутової швидкості, рівне ω1 Подальше збільшення навантаження до М2 зажадає збільшення ЕРС генератора до значення Еr2 >>Еr2 . При цьому спостерігається велика компенсація падіння кутової швидкості,
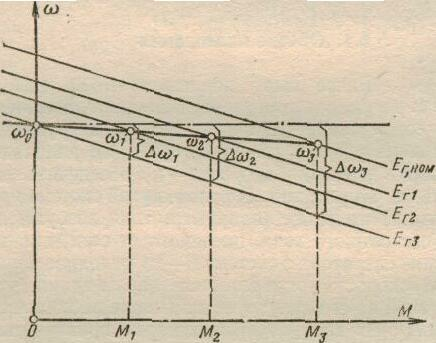
Мал..1. Механічні характеристики в розімкненій системі Г —Д.
рівної Δω1 , для отримання кутової швидкості ω2 ; у разі більшого моменту навантаження М3 ЕРС генератора ще збільшується і стає рівною Еr ном >Еr2 . кутова швидкість приводу при цьому ω3.
Таким чином, для отримання характеристики з високою жорсткістю (потовщена лінія на мал..1) і розширення діапазону регулювання необхідно автоматично із зростанням навантаження підвищувати ЕРС генератора.
Розглянемо системи автоматичного управління двигунами постійного струму незалежного збудження.
Система автоматичного регулювання, в якій ланцюг взаэмодій замикається, і характеризується наявністю зворотніх зв'язків; вона має, принаймні, один зворотний зв'язок, що сполучає вихід системи з її входом.
Крім того, можуть бути, так звані внутрішні зворотні зв'язки, що сполучають вихід і вхід окремих елементів системи автоматичного регулювання.
Зворотні зв'язки діляться на жорсткі і гнучкі.
Жорсткі зв'язки діють як в перехідному, так і в сталому режимах роботи, Гнучкі — тільки в перехідному режимі.
Розрізняють позитивні і негативні зворотні зв'язки. При збільшенні регульованої величини позитивний зв'язок ще більше її збільшує, а негативний, навпаки, зменшує.
Зворотні зв'язки можуть передавати сигнали, пропорційні значенню або похідної (іноді інтегралу) від значення напруги, струму (або моменту), швидкості, кута повороту і т.п. В цих випадках вони називаються (жорсткими або гнучкими, позитивними або негативними) зворотними зв'язками відповідно по напрузі, струму, швидкості, куту.
Для здійснення автоматичного регулювання необхідно виміряти сигнал зворотного зв'язку, потім цей результат у вигляді напруги порівняти (провести підсумовування алгебри) із заданим у вигляді напруги значенням регульованої величини і направити результат порівняння регульованому об'єкту.
Звичайно енергії вимірювального органу виявляється недостатньо для дії на регулюючий орган, тому виникає необхідність в застосуванні підсилювального пристрою. Перераховані елементи (вимірювальний орган, підсилювач і регулюючий орган) входять в пристрій регулятора, що здійснює процес регулювання.
Таким чином, система автоматичного регулювання складається
з регульованого об'єкту і регулятора, що реагує на зміну регульованої величини.
Обмеження моменту, що розвивається приводом, до необхідного значення з певною точністю може пройти, наприклад, при зниженні ЕРС перетворювача, що живить якір двигуна постійного струму незалежного збудження.
Автоматично це виконується при використанні відповідного зворотного зв'язку. В даному випадку доцільно застосувати негативний зворотній звязок по струму, яка вступає в дію при досяганні струмом (або моментом при Ф=const) заданого значення.