

Механізм притискної лапки з керуванням важеля підйому на базі мехатроніки
Механізм з мехатронним керуванням важеля підйому ПЛ (рис.2.7.1) є більш складною вдосконаленою моделлю найпростішого механізму ПЛ з керуванням на базі мехатроніки, яка була розглянута в підрозділі 2.6 ВМР. Структурною особливістю такого механізму є прямий кінематичний зв'язок штоку ПнЦ з важелем підйому притискної лапки. В порівнянні з найпростішою схемою, кількість ланок такого механізму збільшується. Але при цьому, хід штоку циліндра, який забезпечив би підйом ПЛ на необхідну висоту, є незрівнянно меншим, а швидкість та різкість піднятті ПЛ – значно більшою, чим усувається основний недолік найпростішої моделі механізму ПЛ з мехатронним керуванням. Це означає, що механізм з мехатронним керуванням важеля підйому ПЛ є набагато швидкодіючим і не гальмує роботи машини в цілому.
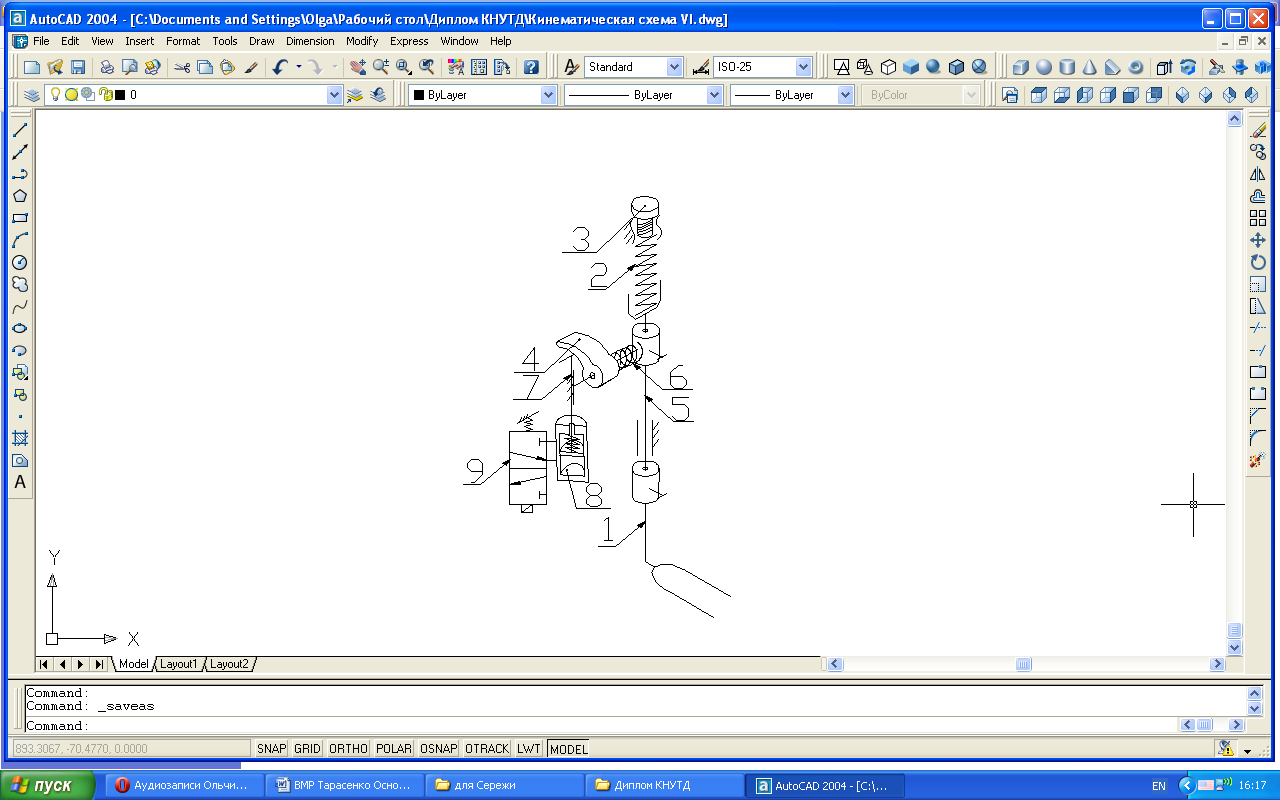
1- притискна лапка;
2-пружний елемент;
3-гвин регулювання;
4-важіль;
5-вертикальний вал;
6-пружина, що забезпечує постійний контакт в системі «шток-важіль»;
7-шток ПнЦ;
8-ПнЦ;
9-соленоїд з моностабільним керуванням.
Рис. 2.7.1.Схема механізму притискної лапки з керуванням
важеля підйому на базі мехатроніки
Також, цей механізм ПЛ можна вважати вдосконаленням класичного механізму з пружним елементом, що був розглянутий в підрозділі 2.1 ВМР. Порівнюючи ці механізми між собою можна прийти до висновку, що мехатронні система керування замінює ручне керування працівника. Отже, додаткове оснащення класичного механізму ПЛ системою керування на базі мехатроніки є ніщо інше як автоматизація роботи даної машини, що усуває основний недолік цього механізму у класичному виконанні – неможливість керування положенням ПЛ під час роботи машини,через що такий механізм ПЛ був непридатним для швейно-вишивальних машин та промислових вишивальних напівавтоматів.
«Квазі»-механізм пл кулачково-кулісного типу
Запропонований механізм ПЛ (рис.2.8.1.), що має закріплений на головному валу 3 кривошип 4 , палець 5 якого утворює контактний зв'язок із фігурним пазом 9 коромисла-куліси 8, до якого рухомо приєднана верхня головка 11 шатуна 10, нижня головка 12 якого з’єднана із напрямною втулкою 17, яка закріплена у другому отворі 14 ПЛ 15, яка виконана у вигляді скоби з отворами для голки 13 та голкотримача 14.
Фігурний паз 9 коромисла-куліси 8 має форму напівкільця з радіусом, який дорівнює радіусу кривошипу 4 для забезпечення руху коромисла-куліси 8 і ПЛ 15 за законом «переміщення-вистій», який співпадає з часом перебування голки в матеріалі та над матеріалом, за один оберт головного валу 3.
Механізм притискної лапки працює наступним чином: обертання головного валу 3 та закріпленого на ньому кривошипу 4 через контакт пальця 5 кривошипу 4 з фігурним пазом 9 трансформується в коливний рух коромисла-куліси 8, який в свою чергу за допомогою шатуна 10 трансформується в поступальний рух повзуна- притискної лапки у вигляді скоби 15 з отворами для голки 13 та для голкотримача 14.
Введення в конструкцію механізму коромисла з копірним пазом, третього шатуна з верхньою та нижньою головками та направляючої втулки, яка закріплена у другому отворі притискної лапки у вигляді скоби, дозволяє збільшити проміжок часу для переміщення матеріалу при знаходженні голки над ним і покращити швидкість роботи машини. Виконання копірного пазу у формі напівкільця з радіусом, який дорівнює радіусу кривошипу дозволяє покращити якість вишивання за рахунок використання закону руху «переміщення-вистій», який співпадає з часом перебування голки в матеріалі та над матеріалом, за один оберт головного валу. Крім того, переміщення притискної лапки у вигляді скоби за наведеним законом дозволяє локалізувати рівномірний тиск у зоні навколо леза голки при її виході з матеріалу і наблизити розміри першого отвору притискної лапки до розмірів діаметра голки.
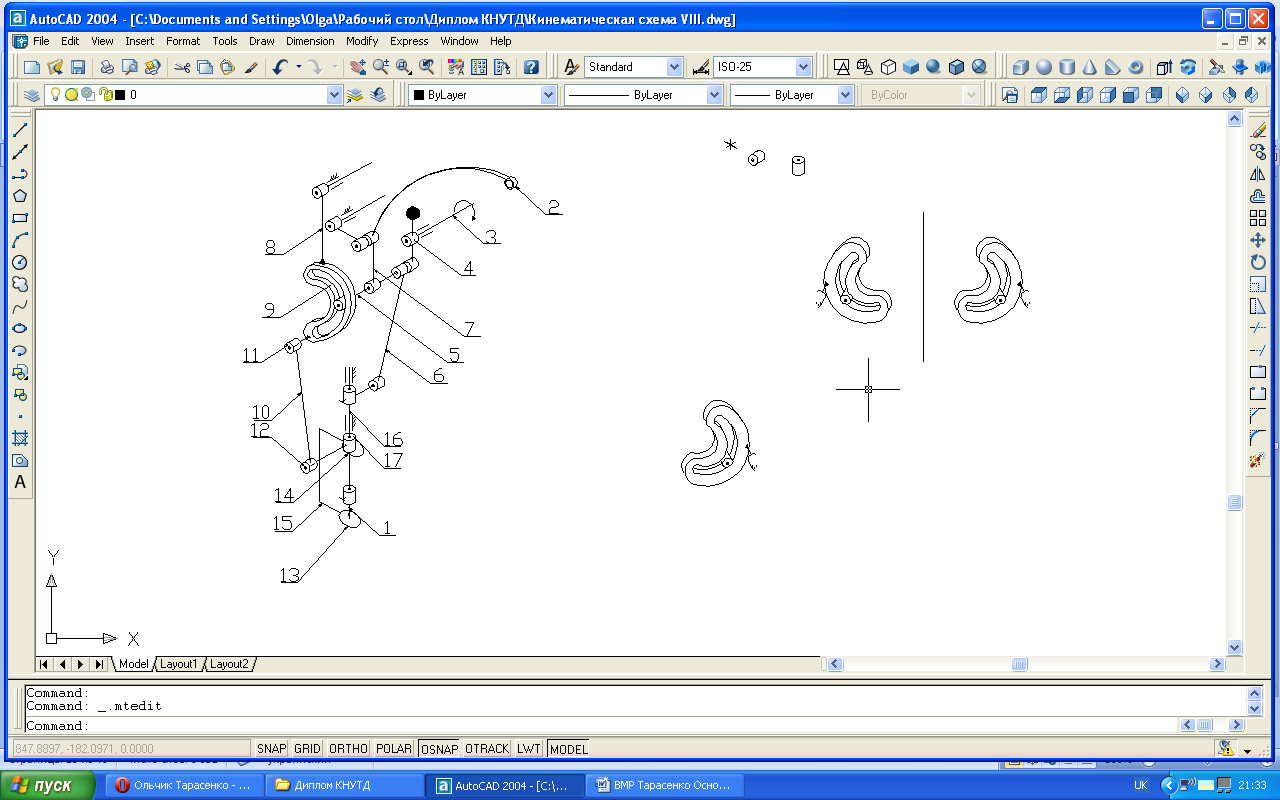
1-голка;
2-ниткопритягувач;
3-головний вал;
4-кривошип;
5-палець кривошипа;
6-шатун механізму голки;
7-шатун механізму ниткопритягувача;
8-коромисло-куліса;
9-фігурний паз, що виконує роль кулачка;
10-шатун механізму ПЛ;
11-верхня головка шатуна механізму ПЛ;
12-нижня головка механізму ПЛ;
13-отвір для голки;
14-отвір для голкотримача;
15-ПЛ у вигляді скоби;
16-стержень механізму голки;
17-направляюча втулка.
Рис 2.8.1. 3D-схема «Квазі»-механізму
ПЛ кулачково-кулісного типу,
механізму голки та механізму ниткопритягувача