

2.2 Механізм пл із пружним елементом
Найпоширеніша модель механізму серед існуючих, головною особливістю якої є постійне перебування ПЛ в крайньому нижньому положенні під час роботи машини, після чого підняття ПЛ виконується працівником вручну за допомогою повертання важеля 4 (рис 2.2.1). Головною перевагою цього механізму є відносна простота конструкції , мала кількість ланок та довгий досвід експлуатації.
Основним недоліком є відсутність можливості керування положенням ПЛ під час роботи машини,що робить такий механізм ПЛ непридатним для швейно-вишивальних машин та промислових вишивальних напівавтоматів.
Схема механізму ПЛ із пружним елементом представлена на рис.2.2.1.
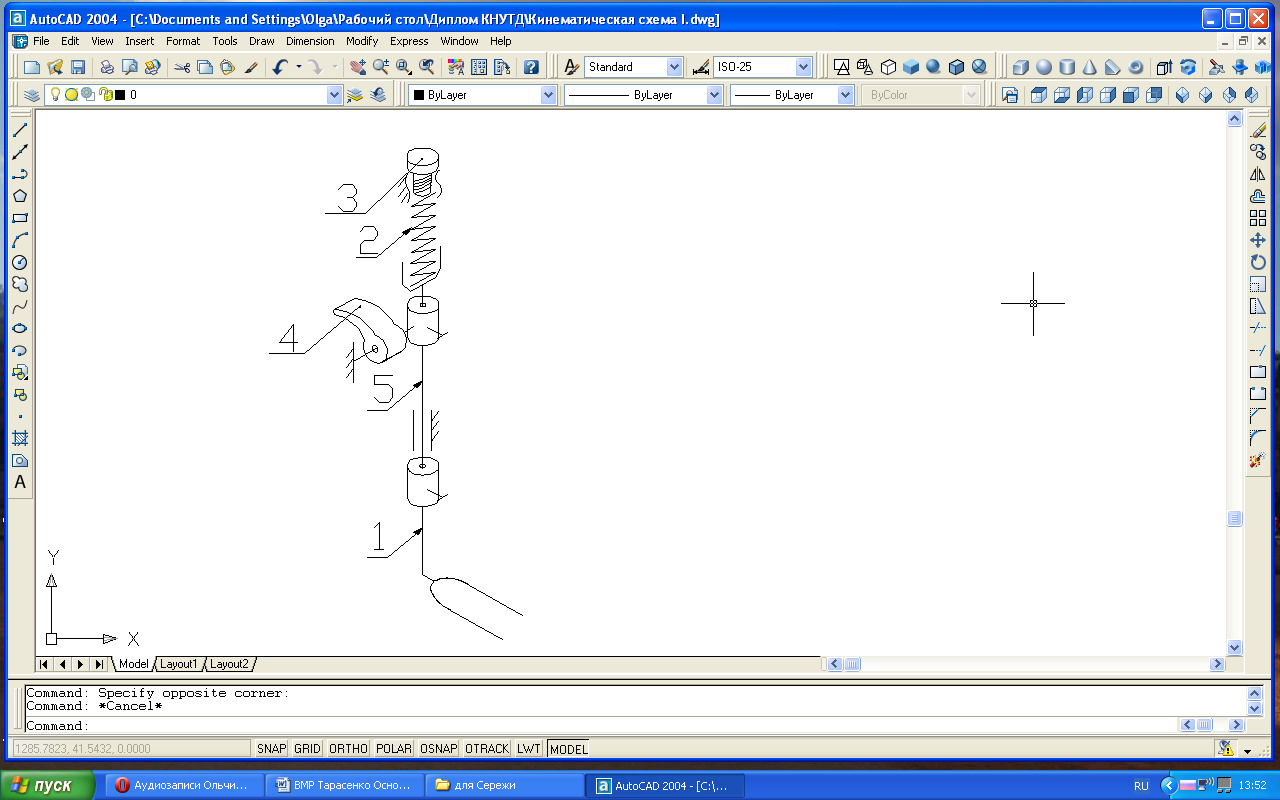
1-притискна лапка;
2-пружний елемент;
3-гвинт регулювання;
4-важіль підйому;
5-вертикальний вал ПЛ.
Рис.2.2.1. Схема механізму ПЛ з пружним елементом
Механізм пл у машинах із верхнім переміщенням матеріалу
Відома промислова швейна машина 803 класу використовується для виконання швів з посадкою однієї з деталей, що зшивається. Особливістю відомої швейної машини є комбіноване переміщення матеріалу за допомогою двох зубчастих рейок, що розташовуються з двох сторін матеріалу, наявність крокуючої притискної лапки та розділової пластини між матеріалами.
Рух кожної зубчастої рейки регулюється окремо: нижня зубчаста рейка розташовується в прорізі голкової пластини, верхня – в прорізі притискної лапки. Текстильний матеріал просувається на довжину стібка однією зубчастою рейкою, друга зубчаста рейка утворює посадку прошарку матеріалів. Під час утворення прошарку та пересування матеріалу ПЛ піднімається і матеріал переміщається по розділовій пластині, після чого ПЛ повертається на поверхню матеріалу. При цьому ПЛ виконує «крок по рухомій доріжці» тому і має назву «крокуючої» [19].
Механізм ПЛ відомої швейної машини (рис. 2.3.1) складається з кривошипу 1, з’єднаний з верхньою головкою шатуна 2, який нижньою головкою з’єднаний із плечем двоплечого коромисла 3, друге плече якого з’єднане з верхньою головкою шатуна 4, друга головка якого утворює кінематичну пару з головкою шатуна 5, який в свою чергу з’єднаний з повзуном 6, рухомо встановленому в напрямних. На повзуні 6 закріплена ПЛ 7, яка разом із повзуном 6 виконує зворотно-поступальні рухи.
Недоліком наведеної конструкції є її складність та багатоланковість, що в свою чергу означає:
збільшення загальної маси конструкції, тобто моментів інерції, надлишкових навантажень, вібрацій тощо,
зниження надійності та довговічності роботи машини,
зниження якості продукції.
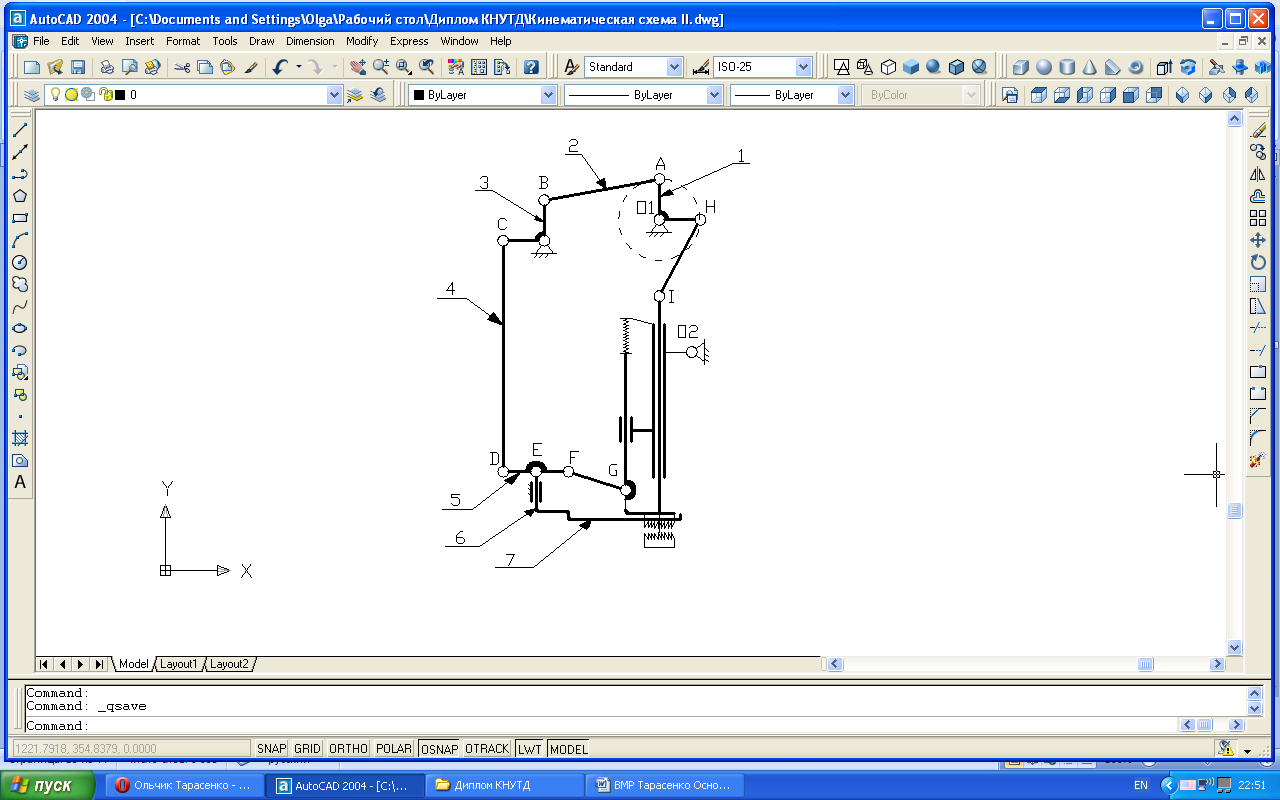
Рис.2.3.1. Схема механізму ПЛ у машинах
із верхнім переміщенням матеріалу
Механізм притискної лапки із пружним елементом та можливістю повороту
Механізм притискної лапки із пружним елементом та можливістю повороту можна розглянути на прикладі швейно-вишивальної машини, запатентованої у США (патент США № № 461226, МПК D05C 3/02, B27/20, 1984р.)[32].
Відома швейно-вишивальна машина, яка включає голку, ниткопритягувач, човник та механізм переміщення притискної лапки, що має закріплений на головному валу кривошип, палець кривошипу, який утворює обертову кінематичну пару з верхньою головкою першого шатуна механізму голки та кінематичну пару з нижньою головкою другого шатуна механізму ниткопритягувача, механізм 2-координатних переміщень п’ялець з матеріалом в режимі машинного вишивання та притискну лапку у вигляді скоби з першим отвором для голки з однієї сторони та другим отвором для голководу з протилежної сторони з можливістю переміщення по вертикалі для звільнення від притискання матеріалу під час його переміщення в горизонтальній площині
Однак, відома швейно-вишивальна машина має механізм переміщення по вертикалі притискної лапки у вигляді скоби за допомогою голководу і пружного елемента, який забезпечує переміщення скоби при виконанні наступних умов, а саме знаходження голки над матеріалом та знаходження пружного елементу в стиснутому стані, що відповідає стану жорсткої ланки. У разі переміщення матеріалу до виходу голки виникає надлишкова деформація леза голки та матеріалу,що призводить до зниження якості вишивання. У разі переміщення матеріалу до стиснення пружного елементу до стану жорсткої ланки, на матеріал діють додаткові навантаження з боку притискної лапки у вигляді скоби, що ще не звільнена від дії пружного елементу. Тому, під час роботи матеріал може бути переміщений у дуже короткому часовому проміжку,
тобто тільки під час виконання обох вищезазначених умов. При цьому час переміщення матеріалу згідно циклограми роботи машини обмежує швидкісні можливості процесу вишивання, тобто матеріал переміщується із запізненням. До того ж, при використанні уведеного механізму переміщення притискної лапки по вертикалі неможливо стовідсотково контролювати закон руху притискної лапки у вигляді скоби: виникають додаткові навантаження на деталі машини та їх деформації, в наслідок чого різко погіршується якість вишивання.
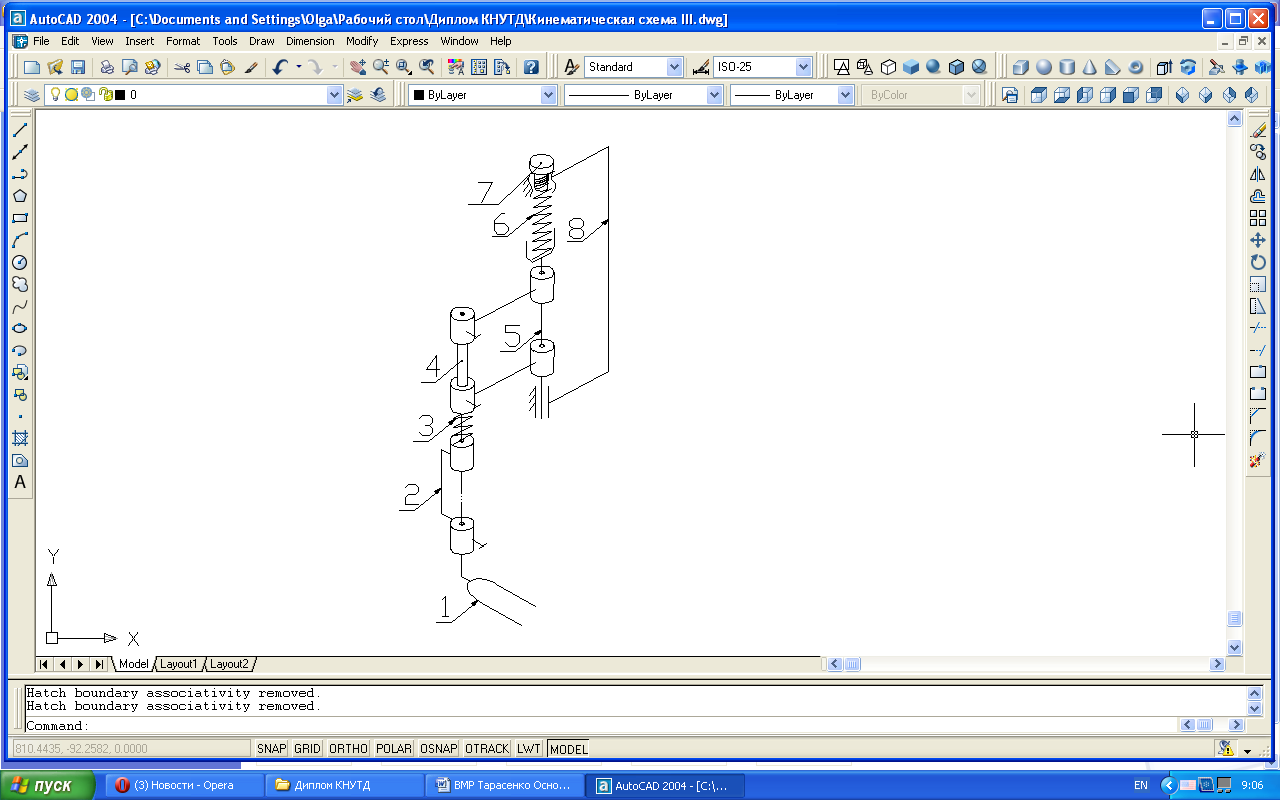
1-притискна лапка;
2-тримач ПЛ у вигляді скоби;
3-пружний елемент тиску ПЛ на матеріал;
4-шарнірне з’єднання універсальне;
5-вісь повороту ПЛ;
6-пружний елемент підйому ПЛ;
7-гвинт регулювання;
8-рама машини.
Рис.2.4.1.Схема механізму притискної лапки
із пружним елементом та можливістю повороту