

3.2 Кінематичне дослідження кулачкового «квазі»-механізму пл швм
Кінематичне дослідження проводиться графо-аналітичним методом, що передбачає побудову планів швидкостей та прискорень, визначення кутових швидкостей та кутових прискорень ланок механізму.
Д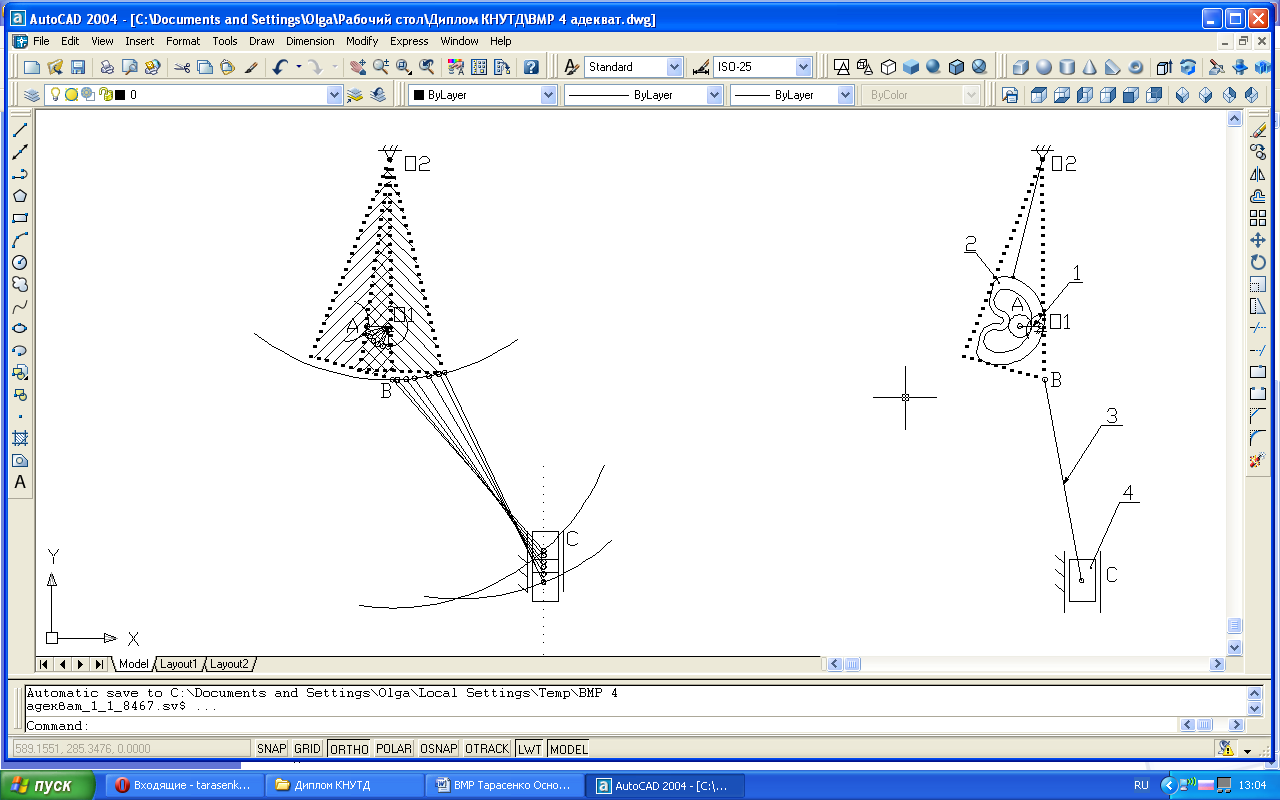 ля
даного механізму доцільно проводити
дослідження на куті повороту головного
валу від 180 ̊до
270 ̊,тобто
під час фази підйому ПЛ, оскільки на
куті від 0 ̊до
180 ̊
відбувається вистій, тобто більшість
ланок механізму знаходиться в стані
нерухомості, а на куті повороту головного
валу від 270 ̊
до 360 ̊,
тобто під час опускання ПЛ, рух ланок є
симетрично подібний до їх руху під час
фази підйому ПЛ.
ля
даного механізму доцільно проводити
дослідження на куті повороту головного
валу від 180 ̊до
270 ̊,тобто
під час фази підйому ПЛ, оскільки на
куті від 0 ̊до
180 ̊
відбувається вистій, тобто більшість
ланок механізму знаходиться в стані
нерухомості, а на куті повороту головного
валу від 270 ̊
до 360 ̊,
тобто під час опускання ПЛ, рух ланок є
симетрично подібний до їх руху під час
фази підйому ПЛ.
Рис.3.2.1 Побудова 7 сумісних положень
«квазі»-механізму на фазі підйому ПЛ
Швидкість в т.А є однаковою для всіх положень механізму, оскільки т.А належить кривошипу, який має незмінну довжину і обертається із сталою швидкістю :
 (3.2.1)
(3.2.1)
 (3.2.2)
(3.2.2)
В той самий час т.Ак. належить коромислу: т.Ак одночасно обертається навколо нерухомого полюса О2 коромисла та проковзує по пазу коромисла, тобто відносно т.А, швидкість якої була визначена раніше. Лінійну швидкість т.Ак знаходимо із системи векторних рівнянь, яку вирішуємо графічно:
 (3.2.3)
(3.2.3)
Т.В також належить коромислу, тому її швидкість можна визначити за допомогою теореми подібності. В даному випадку була використана подібність кутів в трикутнику (ланок механізму та планів швидкостей).
В т.С знаходяться 2 кінематичні пари: обертальна навколо т.В, швидкість якої була визначена раніше, та поступальна відносно нерухомих напрямних. Швидкість т.С визначається із системи векторних рівнянь, яку вирішуємо графічно:
 (3.2.4)
(3.2.4)
Центри мас S прийняті наступним чином:
S2 – на перетині медіан;
S3 – на середині довжини ланки;
S4 – точково сконцентрована в т.С.
Плани швидкостей для 0-6-ого положень «квазі»-механізму ПЛ відображені на рис.3.2.2. Отримані значення швидкостей занесені до таблиці 3.2.1.[16].
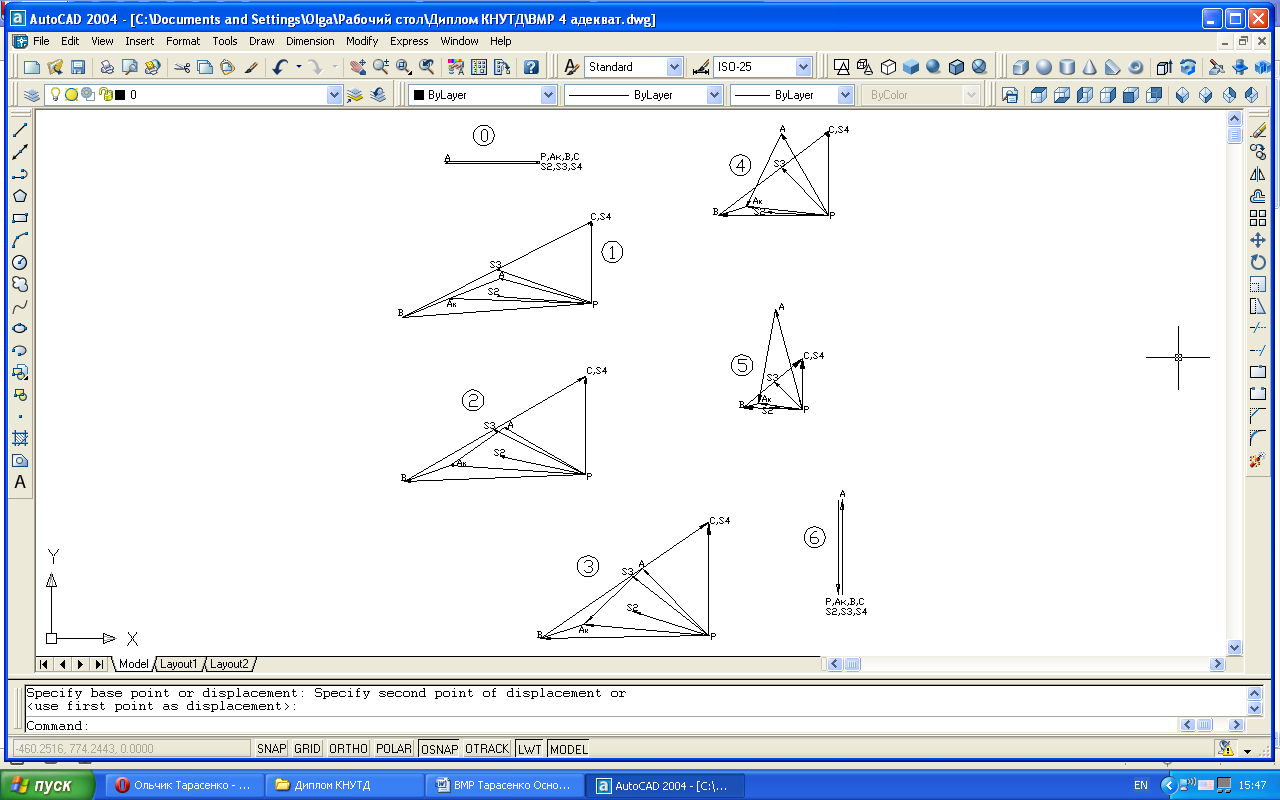
Рис.3.2.2. Плани швидкостей «квазі»-механізму ПЛ ШВМ на фазі підйому, що відповідає куту 180 ̊… 270 ̊повороту головного валу
Значення швидкостей для 0…6 положень механізму ПЛ Табл. 3.2.1
Положення |
VAk |
VS2 |
VB |
VC=VS4 |
VCB |
VS3 |
w2 |
w3 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1,172 |
0,778 |
1,576 |
0,677 |
1,761 |
0,835 |
1,465 |
2,147 |
2 |
1,13 |
0,725 |
1,511 |
0,818 |
1,745 |
0,852 |
1,412 |
2,128 |
3 |
1,048 |
0,664 |
1,406 |
0,942 |
1,716 |
0,815 |
1,31 |
2,092 |
4 |
0,688 |
0,532 |
0,92 |
0,7 |
1,157 |
0,563 |
0,86 |
1,411 |
5 |
0,371 |
0,243 |
0,489 |
0,419 |
0,635 |
0,327 |
0,464 |
0,774 |
6 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
 (3.2.5)
(3.2.5)
 (3.2.6)
(3.2.6)
Побудову плану прискорення механізму доцільно провести при крайньому положенні механізму, оскільки саме в цьому положенні прискорення ланок будуть максимальними. З таблиці 3.2.1 видно, що максимальна зміна швидкостей відбувається в 1 положенні.
Нормальні складові прискорень:
 (3.2.7)
(3.2.7)
 (3.2.8)
(3.2.8)
 (3.2.9)
(3.2.9)
Ознаки кулісності механізму, а саме наявність складного плоско-паралельного руху призводять до появи прискорення Коріоліса:
 (3.2.10)
(3.2.10)
План прискорення для положення 1 вказаний на рис. 3.2.3. Значення тангенціальних прискорень значно перевищують значення нормальних прискорень, тому в даному масштабі нормальні прискорення мають довжину менше 1 мм і на рис.3.2.3 не вказані. Знайдені значення прискорень наведені в таблиці 3.2.2.
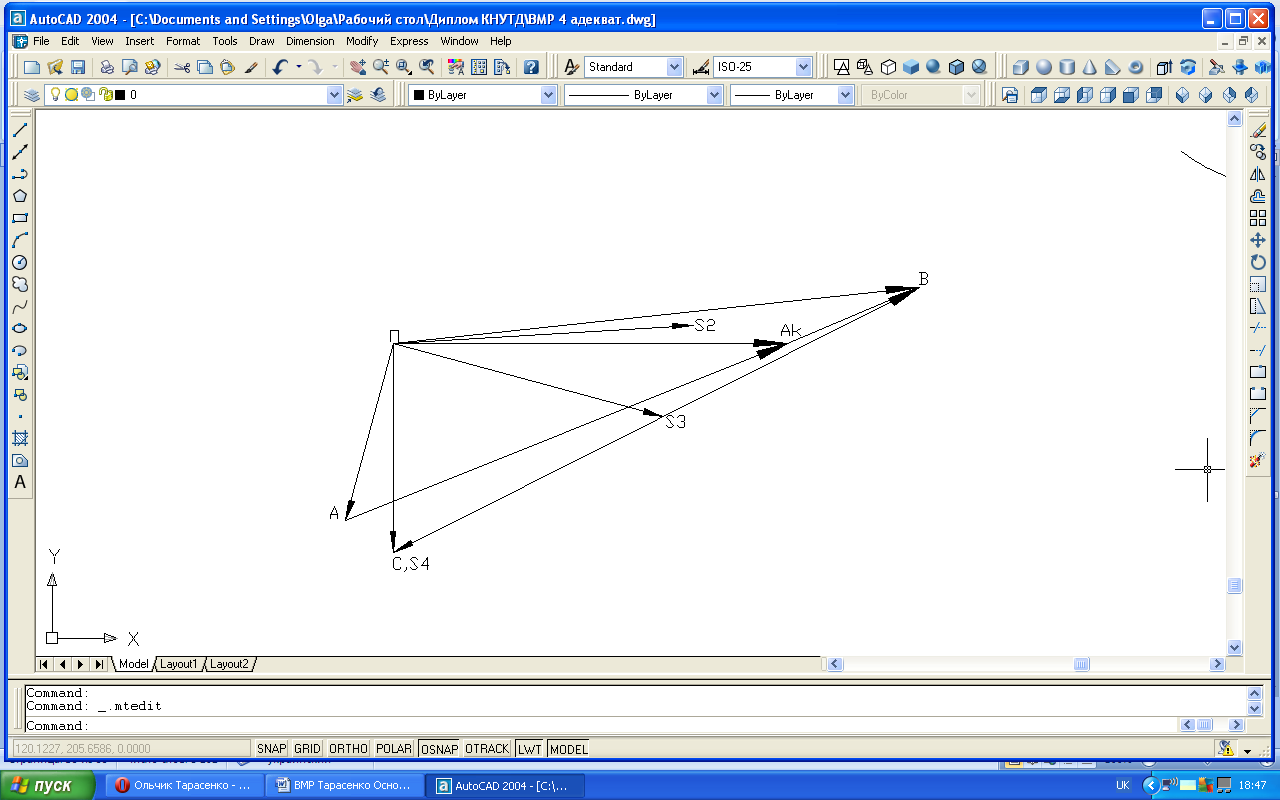
Рис.3.2.3. План прискорення «квазі»-механізму для 1-ого положення
Результати побудови плану прискорень Табл.3.2.2
Полож. |
aAk |
aS2 |
aB |
aC=aS4 |
aCB |
aS3 |
ξ2 |
ξ3 |
1 |
176 |
125 |
236 |
93,3 |
262 |
134 |
2.2 |
3.2 |
 (3.2.11)
(3.2.11)
 (3.2.12)
(3.2.12)