

Компоненты напряжений рассчитываются после расчета деформаций
{}n=[D]n{}n,{}n– матрица столбец компонент напряжений x,y,xy (плоское деформированное состояние)
[D]n– матрица упругости или матрица упруго пластичности, зависит от того, в каком состоянии находится конечный элемент. Компоненты матрицы [D] также одинаковы для всех материальных точек конечного элемента вне зависимости от вида полинома (см. (1) правая часть) и при допущении однородности металла.
Вывод основной системы МКЭ.
Дискретизация области на конечные элементы.
Вывод функций форм и матриц дифференцирования конечных элементов.
3. Вывод основной системы мкэ и минимизация энергии деформации.
Разбиение области на элементы сводится к заданию числа, размеров и формы непересекающихся подобластей – конечных элементов.
Каждому конечному элементу соответствует группа узлов (вершин многоугольника для плоского конечного элемента, вершин многогранника для объемного конечного элемента). Всем узлам и элементам присваиваются порядковые номера. Для каждого узла указываются координаты. Вся эта информация обычно представляется в форме двух информационных файлов: файл координат и файл номеров узлов составляющих элементы.
В зависимости от размерности задачи плоскую или объемную область разбивают на: одномерные элементы; двухмерные элементы или трехмерные элементы.
Элементы, сторонами которых являются прямолинейные отрезки или гранями которых являются многоугольники, называют симплекс-элементами. В симплекс-элементе число узлов (вершин) всегда на единицу превышает размерность задачи.
При решении одномерной задачи применяют:
одномерный симплекс-элемент с двумя узлами;
одномерный квадратичный элемент с тремя узлами.
При решении двухмерных задач (плоское деформированное состояние, плоское напряженное состояние) применяют:
треугольный симплекс-элемент с тремя узлами;
прямоугольный симплекс-элемент с четырьмя узлами;
квадратичный треугольный элемент с шестью узлами.
При решении трехмерных задач применяют:
симплекс-элемент с четырьмя узлами – тетраэдр;
симплекс-элемент с восемью узлами – параллелепипед.
При решении осесимметричных задач, применяют кольцевые конечные элементы, например с треугольным поперечным сечением.
При дискретизации области, необходимо стремиться к тому, чтобы отрезки, треугольники, тетраэдры приближались по форме к равным отрезкам, к равносторонним треугольникам, к правильным тетраэдрам. Такое разбиение обеспечивает более точные результаты, хорошо согласующиеся с экспериментальными данными.
В заключении отметим, что в областях резкого изменения (большого градиента) искомой характеристики Н.Д.С. следует проводить разбиение на мелкие по размерам элементы.
Каждой форме конечного элемента (отрезку, треугольнику и т.д.) соответствует (в смысле возможности определения коэффициентов полинома) интерполяционный полином, описывающий кусочно-непрерывную функцию перемещений (или приращений перемещений, или скоростей течения в зависимости от использующейся теории пластичности) внутри конечного элемента, т.е. полином с областью определения, ограниченной конечным элементом.
Полиномы соответствующие симплекс-элементам содержат константы и линейные члены, члены, содержащие независимые переменные x и y в первой степени.
Полином, соответствующий одномерному элементу имеет вид:
Ux,n=α1+α2·x,
двумерному
треугольному симплекс-элементу:![]()
Ux,n=α1+α2·x+α3·y; (1)
Uy,n=β1+β2·x+β3·y.
Количество коэффициентов в каждом полиноме равно количеству узлов конечного элемента.
Трёхмерному симплекс-элементу (тетраэдру):
Ux,n=α1+α2·x+α3·y+α4·z;
Uy,n=β1+β2·x+β3·y+β4·z;
Uz,n=c1+c2·x+c3·y+c4·z.
Методику вывода функций форм и матриц дифференцирования рассмотрим на примере треугольного конечного элемента.
Напомним, что функции формы, с применением которых удаётся выразить полиномы – кусочно-непрерывные функции (1) через узловые перемещения элемента: (будем говорить далее о перемещениях узлов, но всё остаётся в силе для приращений перемещений или скоростей узлов) содержатся в выражениях:
Ux,n=Nx,iqx,i+Nx,jqx,j+Nx,mqx,m;
Uy,n=Ny,iqy,i+Ny,jqy,j+Ny,mqy,m.
или в матричной форме:
{U}n=[N]n·{q}n (2),
где
{U}n=![]() ;[N]n=
;[N]n= ;
;
{q}n= (см.
рис.1.);
(см.
рис.1.);
Y

q
y
,
m
q
x
,
m
m





q
q
y
,
i
q
y
,
j
q
x
,
j
j
i
n
.







x
,
i
X

Рис.1.
{U}n – матрица-столбец полиномов n-го элемента,
[N]n – матрица функций форм,
{q}n – матрица-столбец перемещений узлов n-го элемента.
В зависимости (1) подставим значения перемещений в узлах и координаты узлов n-го элемента, получим в результате:
 =
=

 ;
;
обозначим матрицу с размерами 6×6 -[c]n, а матрицу-столбец коэффициентов- {α}n, тогда:
{q}n=[c]n·{α}n (3).
Из математики известно, что произведение матрицы на обратную матрицу к ней, равно единичной матрице:
[с]n-1[с]n=[1].
Поэтому если левую и правую части (3) умножить слева на [с]-1 то получим:
{α}n=[c]-1n·{q}n (3)
Зависимость (1) представим в виде:
{U}n=[p]·{α}n (4);
где
[p]= - матрица, произведение которой на {α}n
равно исходным полиномам, принятым для
описания кусочно-непрерывной функции
с областью определения ограниченной
конечным элементом.
- матрица, произведение которой на {α}n
равно исходным полиномам, принятым для
описания кусочно-непрерывной функции
с областью определения ограниченной
конечным элементом.
Выражение (4) с учётом (3) принимает вид:
{U}n=[p]·[с]-1n·{q}n (5)
Сравнивая (2) с (5) заключаем что:
[N]n=[p]·[с]-1n (6)
Обратная матрица [с]-1рассчитывается следующим образом:
[с]-1n= ;
;
где Аi,j – алгебраическое дополнение элемента сi,j;
|с| – определитель матрицы.
Алгебраическим дополнением элемента сi,j называют определитель, составленный из элементов матрицы [c]n оставшихся после вычеркивания в матрице i-ой строки и j-го столбца. При этом знак перед определителем +, если i=j, и – если i<>j.
Расчет по формуле (6) показывает что:
Nx,i =1/(2·Δn ) ·[(xjym–xmyj)+(yj–ym)·x+(xm–xj)·y];
Nx,j =1/(2·Δn )· [(xmyi–xiym)+(ym–yi)·x+(xi–xm)·y];
Nx,m =1/(2·Δn )· [(xiyj–xjyi)+(yi–yj)·x+(xj– xi)·y].
Ny,i=Nx,i;
Ny,j=Nx,j;
Ny,m=Nx,m;
Δn=1/2· – площадь n-го
элемента.
– площадь n-го
элемента.
Компоненты
матрицы дифференцирования [В]n
получаются дифференцированием
кусочно-непрерывных функций записанных
в виде (2). Дифференцирование производится
в соответствии с геометрическими
соотношениями (![]() и т.д.):
и т.д.):
[В]n= ;
;
или если воспользоваться зависимостями (6):
[В]n=1/(2·Δn)· –
матрица дифференцирования для треугольного
конечного элемента с узлами i,j,m.
–
матрица дифференцирования для треугольного
конечного элемента с узлами i,j,m.
Для вывода основной системы МКЭ [k]·{q}={F} используется принцип минимума энергии деформации.
Согласно методу баланса работ:
Апл.д.=Авн; (7)
где Апл.д. – работа или энергия пластической деформации;
Авн – работа внешних сил.
Составим из (7) энергетический функционал и выясним, при каких перемещениях узлов конечных элементов этот функционал принимает наименьшее значение.
Функционал: Ф= Апл.д.–Авн (8)
Апл.д.= ;
(9)
;
(9)
Выражение (9) записано для случая плоского деформированного состояния заготовки с объемом очага пластической деформации V.
При конечно-элементном представлении тела интеграл (9) можно вычислить иначе:
Апл.д.=![]()
или
![]() ,
,
где k количество конечных элементов. С учётом зависимостей, по которым в рамках МКЭ рассчитываются {Е}i и {σ}i (компоненты деформаций и напряжений элемента) получаем:
![]() ;
(10)
;
(10)
где k – количество конечных элементов;
![]() ;
(11)
;
(11)
где m – количество граничных нагружаемых узлов;
qj – перемещение j-го узла;
Fj – сила действующая на j-й узел.
Подставляя (10) и (11) в (8) получаем
![]() ;
(12)
;
(12)
Из курса математики известно, что для отыскания минимального значения функционала берут производную или производные по переменным, от которых зависит функционал (Ф), приравнивают их 0, с последующим решением полученных уравнений относительно переменных. После расчёта переменных (корней системы) можно рассчитать минимальное значение Ф.
Переменными в функционале (12) являются перемещения (или приращения перемещений) всех узлов. Поэтому для расчета перемещений узлов возьмём частные производные по перемещениям всех узлов, приравняем их 0 и решим полученную систему относительно их.
Заметим, что каждая производная будет зависеть от перемещений узлов, т. к. в выражении (10) энергия элемента выражается через произведение матриц {q}Ti и {q}i, каждое уравнение будет иметь вид:
![]()
или
![]() , (13)
, (13)
где [k]i=[B]T·[D]i·[B]I·Vi
- матрица жёсткости i-го
конечного элемента, одного из l
элементов соприкасающимся в j–ом
узле,
![]() - количество конечных элементов
соседствующих вj-ом
узле.
- количество конечных элементов
соседствующих вj-ом
узле.
Уравнение равновесия
j-го
узла вида (13) можно записать в виде
произведения матрицы-строки коэффициентов
и матрицы-столбца перемещений
соответствующим не отдельным
![]() элементам, а всей конечно-элементной
сетке:
элементам, а всей конечно-элементной
сетке:
[k](2·j-1),m·{q}={F}2·j-1,
для случая, если уравнение равновесия составлено для сил направленных вдоль ОХ,
[k]2j,m·{q}={F}2j – для сил направленных вдоль оси OY,
переменная m (если решается плоская задача) удовлетворяет неравенству: 1<=m<=(2·z), z-количество узлов,
{q}=
{F}2j-1 и {F}2j – компоненты матрицы-столбца нагрузки в (2j-1)-ой и (2j)-ой строках.
Ненулевые компоненты строк ( [k](2·j-1),m [k]2j,m ) рассчитываются путём сложения соответствующих компонент матриц жёсткости [k]i=[B]T·[D]i·[B]I·Vi элементов, окружающих j-ый узел.
Формирование матрицы жесткости ([к ] ) – матрицы коэффициентов системы уравнений [K]*{Q}={F}.
1.Формирование матрицы жесткости способом объединения по узлам.
2. Формирование матрицы жесткости способом объединения по элементам.
Каждое уравнение системы [K]*{q}={F} является уравнением равновесия (без учета инерционных сил) соответствующего узла в направлении оси OX, OY или OZ. В каждом уравнении, в левой части, сумма проекций всех внутренних сил, действующих на узел в направлении оси OX или OY или OZ. Внутренние силы действуют на узел со стороны соседствующих в узле элементов (см. рис 1).
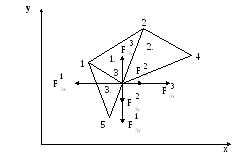
Рис. 1.


 Внутренние
силы выражаются через неизвестные
узловые перемещения:
Внутренние
силы выражаются через неизвестные
узловые перемещения:
где [К]е=1… - матрицы жесткости элементов с номерами 1, 2, 3;
![]() -
сила, действующая в направлении оси ОХ
на i-ый
узел со стороны j-го
элемента;
-
сила, действующая в направлении оси ОХ
на i-ый
узел со стороны j-го
элемента;
![]() -
сила, действующая в направлении оси ОY
на i-ый
узел со стороны j-го
элемента.
-
сила, действующая в направлении оси ОY
на i-ый
узел со стороны j-го
элемента.
Пусть:



Составим сумму внутренних сил, действующих на третий узел в направлении оси ОХ:
 Вектор
строка:
Вектор
строка:
[46 46 32 32 66 66 20 20 34 34] (1)
– представляет собой одну из строк матрицы жесткости [К], К5,j – значения компонент этой строки получены присвоением значениям соответствующих компонентов матриц жесткости окружающих элементов или их сложением (сложением коэффициентов при одинаковых q).
Каждую компоненту матрицы жесткости [K] можно рассчитать по формуле:
![]() ,
,
где l – число окружающих узел элементов;
![]() -
компонента матрицы жесткости е-го
элемента.
-
компонента матрицы жесткости е-го
элемента.
Процедура формирования матрицы [К] способом объединения по узлам:
Procedure Rachet_matrSt;
Var m1, m2, m3, m4, m5, m6: byte;
Begin
for i:=1 to 2*col_uzlov do
for j:=1 to 2*col_uzlov do st[i]^[j]:=0;
for n:=1 to kol_uzlov do
begin
for k:=1 to 9 do
begin
L:=uzel_elem[n,k];
if l>0 then begin
m1:=nod[L,1]*2-1;m2:=nod[L,1]*2;
m3:=nod[L,2]*2-1;m4:=nod[L,2]*2;
m5:=nod[L,3]*2-1;m6:=nod[L,3]*2;
if n=nod[L,1] then begin
st[2*n-1, m1]:=st[2*n-1, m1]+ste[L, 1, 1];
st[2*n, m1]:=st[2*n, m1]+ste[L, 2, 1];
st[2*n-1, m2]:=st[2*n-1, m2]+ste[L, 1, 2];
………………………………………………*8раз
st[2*n, m6]:=st[2*n, m6]+ste[L, 2, 6];
end;
if n=nod[L,2] then begin
st[2*n-1, m1]:=st[2*n-1, m1]+ste[L, 3, 1];
st[2*n, m1]:=st[2*n, m1]+ste[L, 4, 1];
st[2*n-1, m2]:=st[2*n-1, m2]+ste[L, 3, 2];
………………………………………………*8раз
st[2*n, m6]:=st[2*n, m6]+ste[L, 4, 6];
end;
if n=nod[L,3] then begin
st[2*n-1, m1]:=st[2*n-1, m1]+ste[L, 5, 1];
st[2*n, m1]:=st[2*n, m1]+ste[L, 6, 1];
st[2*n-1, m2]:=st[2*n-1, m2]+ste[L, 5, 2];
………………………………………………*8раз
st[2*n, m6]:=st[2*n, m6]+ste[L, 6, 6];
end;end;end;end;end;
Формирование матрицы жесткости способом объединения по элементам заключается в построении расширенных матриц жесткости с последующим их сложением.
Расширенная матрица жесткости элемента [K]i,p строится из матрицы жесткости [K]i конечного элемента.
Ненулевые компоненты матрицы [K]i,р равны компонентам [K]i, причем положение каждой компоненты матрицы [K]i в матрице [K]i,р определяется по номерам узлов составляющих i-й элемент (см. рис. 2).

в 2*1-1 ую строку
в 2*1 ую строку
в 2*3-1 ую строку
в 2*3 ую строку
в 2*2-1 ую строку
в 2*2 ую строку













![]()
Рис. 2. Схема к построению расширенной матрицы жесткости