

Заданные параметры движения
i |
1 |
2 |
3 |
|
1,0 |
1,2 |
2,0 |
|
|
|
|




Целью проектирования является определение
параметров: .
.
Для решения задачи введем дополнительные
переменные
 и
и
 .
Для точки i = 1 запишем соотношения:
.
Для точки i = 1 запишем соотношения:
 ; (2.1)
; (2.1)
 . (2.2)
. (2.2)
Из ∆ABCвыполняется
равенство:
 . (2.3)
. (2.3)
Подставив в выражение (2.3) значения и из (2.1) и (2.2), получим:
 (2.4)
(2.4)
После преобразования (2.4) получим:
 (2.5)
(2.5)
В окончательном виде запишем:
 . (2.6)
. (2.6)
Введем обозначения:
 ;
;
 ;
(2.7)
;
(2.7)
 .
.
Преобразуя (2.7) получим:
 (2.8)
(2.8)
Для i-тых точек траектории составим систему уравнений:
 ,
где i = 1, 2, 3. (2.9)
,
где i = 1, 2, 3. (2.9)
Систему уравнений (2.9) можно представить в матричном виде:
A*K = YV (2.10)
где:
 ,
,  ,
,  .
.
Решением системы уравнений (2.10) в среде MATLAB будет:
 или
или
 (2.11)
(2.11)
Расчет траектории движения груза связан с выполнением программы
 .
.
Из рис.2.1 видно, что при движении по заданной траектории при:
 (2.12)
(2.12)
выполняется условие:
 , (2.13)
, (2.13)
поэтому:
 (2.14)
(2.14)
Поскольку:
 ,
то угол
,
то угол
 будет соответствовать:
будет соответствовать:
 (2.15)
(2.15)
Решение поставленной задачи в среде MATLAB в режиме прямых вычислений.
Пример 2.1
>>fi=[20 45 60];
>>si=[1.0 1.2 2.0];
>> fi1=fi*(pi/180); %Перевод угла " "
в радианы.
"
в радианы.
>>yv=si.^2 %Вектор выхода.
yv = %Результат вычислений.
1.0000 1.4400 4.0000
>> A=[si'.*cos(fi1)' sin(fi1)' -ones(3,1)] %Определение матрицы А.
А= %Результат вычислений.
0.9397 0.3420 -1.0000
0.8485 0.7071 -1.0000
1.0000 0.8660 -1.0000
>> K=inv(A)*yv' %Расчет вектора К.
K =
12.3903
4.2991
12.1135
>> a1=K(1)/2
a1 =
6.1952
>> a3=K(2)/(2*a1)
a3 =
0.3470
>> a2=sqrt(a1^2+a3^2-K(3))
a2 =
5.1368
Для выполнения расчетов и построения траекторий движения элементов манипулятора, составим программу в режиме редактора.
Лабораторная работа № 1. "Расчет элементов манипулятора и построение траекторий движения при перемещении груза параллельно оси абсцисс"
Цель работы.
По программе файла pt1.m:
1.Определить размеры звеньев робота-манипулятора и высоту захвата груза.
2.Построить траектории движения элементов манипулятора в зависимости от плавного изменения угла поворота робота.
3.Построить положения звеньев манипулятора в зависимости от заданных углов поворота робота.
Вариант № 1.
% File pt1.m
fi=[20 45 60] %Исходные значения угла поворота.
%fi=[60 45 20] %Знак " % " в начале строки означает комментарий (не %исполняемый программой текст).
si=[1.0 1.2 2.0] %Исходные значения положения захвата груза.
%si=[2.0 1.2 1.0]
fi1=fi*(pi/180); %Перевод угла в радианы.
yv=si.^2
x2=fi;
A=[si'.*cos(fi1)' sin(fi1)' -ones(3,1)]
K=inv(A)*yv'
a1=K(1)/2 %Определение параметров манипулятора.
a3=K(2)/(2*a1)
a2=sqrt(a1^2+a3^2-K(3))
%Построение траекторий движения элементов %манипулятора.
fi=20:0.5:60; %Начальные и конечные значения угла с шагом 0,5.
fi1=fi*(pi/180);
fi2=pi/2-fi1+acos((a1*sin(fi1)-a3)/a2);
%Расчетугла .
.
x1=a1*cos(fi1)-a2*cos(pi-fi1-fi2); %Расчеткоординат X и Y.
y1=a1*sin(fi1)-a2*sin(pi-fi1-fi2);
plot(fi,x1,'m-',fi,y1,fi,fi2,'k--',fi,fi1,'k'),grid %Графиктраекторийдвижения legend('si','a3','fi2','fi1',0) %элементовманипулятора.
hx=xlabel('fi,grad');
holdon; %Управление сохранением текущего
%графического окна (включение сохранения графика)
plot(x2,si,'ro') %Ввод в график красных кружков.
pause
holdoff; %Выключение сохранения графика.
%Построение координат положений звеньев манипулятора.
fi=[20 45 60];
%fi=[60 45 20];
fi1=(pi/180).*fi;
x=[0 a1*cos(fi1(1)) si(1)]; %Координаты
y=[0 a1*sin(fi1(1)) a3]; %положений
xa=[0 a1*cos(fi1(2)) si(2)]; %звеньев
ya=[0 a1*sin(fi1(2)) a3]; %манипулятора.
xb=[0 a1*cos(fi1(3)) si(3)];
yb=[0 a1*sin(fi1(3)) a3];
plot(x,y,x,y,'*',xa,ya,xa,ya,'*',xb,yb,xb,yb,'*'),axis([0 6 0 6]),grid
xlabel('X')
ylabel('Y')
Для решения предлагаются 15 вариантов задания исходных данных, приведенные в табл. 2.2.
Таблица 2.2
Варианты заданий для лаб. работы № 1
№ Варианта |
fi |
si |
axis |
1 |
[20 45 60] |
[1.0 1.2 2.0] |
[0 6 0 6] |
2 |
[20 45 60] |
[1.0 1.2 2.0] |
[0 4 0 4] |
3 |
[60 45 20] |
[1.0 1.2 2.0] |
[0 6 0 6] |
4 |
[60 45 20] |
[1.0 1.2 2.0] |
[0 4 0 4] |
5 |
[10 45 60] |
[1.0 1.2 2.0] |
[0 7 0 6] |
6 |
[20 45 60] |
[2.0 2.2 4.0] |
[0 10 0 8] |
7 |
[20 45 60] |
[2.0 2.3 3.5] |
[0 15 0 15] |
8 |
[20 40 60] |
[2.0 2.1 4.5] |
[0 10 0 10] |
9 |
[20 50 60] |
[2.0 2.1 4.5] |
[0 8 0 8] |
10 |
[20 50 60] |
[2.0 2.1 3.5] |
[0 8 0 8] |
11 |
[20 50 60] |
[2.0 2.3 3.5] |
[0 9 0 9] |
12 |
[20 50 60] |
[4.5 2.3 2.0] |
[0 7 0 7] |
13 |
[20 40 60] |
[4.5 2.3 2.0] |
[0 5 0 5] |
14 |
[20 50 60] |
[4.5 2.5 2.0] |
[0 5 0 5] |
15 |
[20 45 60] |
[4.5 2.5 2.0] |
[0 7 0 7] |
Выполнение программы возможно в режиме Редактора: пункт меню Отладка (Debug) Запуск (Run), либо в Командном Окне (CommandWindow): набрать: >> pt1, затем нажать Enter.
Результаты решения задачи для первого варианта.
fi =
20 45 60
si =
1.0000 1.2000 2.0000
yv =
1.0000 1.4400 4.0000
A =
0.9397 0.3420 -1.0000
0.8485 0.7071 -1.0000
1.0000 0.8660 -1.0000
K =
12.3903
4.2991
12.1135
a1 =6.1952; a3 =0.3470; a2 = 5.1368;
Нажимаем любую клавишу на клавиатуре и получаем рис.2.3.

Рис.2.3 График положений звеньев манипулятора
В окне Редактора в файле pt1.m вводим значения для второго варианта, сохраним файл pt1.m со значениями второго варианта. Затем в пункте меню "Отладка" выполним команду "Запуск". Либо в Командном Окне выполняем программу с новыми значениями, предварительно в Командном Окне выполняем команду: "CLC" (очистка экрана).
Лабораторная работа № 2. "Компьютерное моделирование положений двухзвенного робота - манипулятора по любой заданной траектории движения выходных координат"
Рассмотрим кинематическую схему манипулятора, приведенную на рис.2.4.

Пусть заданны:
- длины плеч звеньев манипулятора;
(x,y)-координаты захвата манипулятора при движении груза.
Необходимо определить углы:
 .
.
Из ∆ОВC по теореме Пифагора длина стороны
ОВ имеет значение
 .
.
Для решения поставленной задачи,
используя теорему косинусов, из выражений
(2.16) и (2.20) определяем углы
 .
Углы
.
Углы
 находим по выражениям (2.18), (2.19).
находим по выражениям (2.18), (2.19).
 ; (2.16)
; (2.16)
 ; (2.17)
; (2.17)
 ; (2.18)
; (2.18)
 ; (2.19)
; (2.19)
 ; (2.20)
; (2.20)
 . (2.21)
. (2.21)
Из рис.2.4 определяем значения текущих координат траектории движения груза:
 ; (2.22)
; (2.22)
 . (2.23)
. (2.23)
Расчет положений двухзвенного робота – манипулятора по заданной траектории движения выходных координат в среде MATLAB выполним в лабораторной работе № 2.
Лабораторная работа №2
Цель работы.
По программе файла pt2.m:
1.Произвести расчеты значений углов α и β расположения звеньев робота-манипулятора, используя заданные координаты захвата груза x и y.
2.Рассчитать координаты пяти положений звеньев манипулятора.
3.Построить график пяти положений звеньев двухзвенного манипулятора.
%File pt2.m
ZA=[9 7 5 3 1;1 3 5 7 9] %Вариант 1. Матрица
 .
.
%Заданная траектория движения груза в %координатах (x,y).
a1=6.1952;a2=5.1368; %Заданная длина плеч звеньев %манипулятора.
ZB=ZA.^2; %Поэлементное возведение в квадрат
%матрицы ZA ( ).
).
ZC=sum(ZB); %Вектор суммы квадратов элементов матрицы ZB.
S=ZC.^0.5; %Поэлементное возведение вектора ZC в степень 0,5.
SK=S.^2; %Поэлементное возведение вектора S в квадрат.
V=ZA(2,:)./ZA(1,:); %Вектор поэлементного деления значений %координат у на х матрицы ZA.
alf2=atan(V); %Расчет значений угла α2.
ch=a1^2-a2^2+SK; %Расчет значений вектора ch.
zn=2*a1.*S; %Расчет значений вектора zn.
alf1=acos(ch./zn); %Расчет по теореме косинусов значений угла α1.
alf=alf1+alf2; %Расчет значений угла α.
ch1=a1^2+a2^2-SK; %Расчет значений вектора ch1.
zn1=2*a1*a2; %Расчет числа zn1.
bet=acos(ch1./zn1); %Расчет по теореме косинусов значений угла β.
alfg=(180/pi)*alf; %Значения угла α в радианах.
betg=(180/pi)*bet; %Значения угла β в радианах.
[alfg;betg] %Матрица значений углов α и β.
x=a1*cos(alf)+a2*cos(pi-alf-bet); %Расчет выходных координат х и у
y=a1*sin(alf)-a2*sin(pi-alf-bet); %траекторийдвижениягруза.
[x;y] %Матрица значений координат х и у.
X=[zeros(1,5) a1*cos(alf) x]; %Расчет координат X,Y звеньев траекторий
Y=[zeros(1,5) a1*sin(alf) y]; %движения манипулятора.
W=[X;Y] %Матрица элементов манипулятора в координатах х и у.
R1=[W(:,1) W(:,6) W(:,11)] %Матрицы [2*3] координат х и у, для трех
R2=[W(:,2) W(:,7) W(:,12)] %точек звеньев манипулятора
R3=[W(:,3) W(:,8) W(:,13)] %(начало 1-го звена, конец 1-го начало
R4=[W(:,4) W(:,9) W(:,14)] %2-го звеньев, конец 2-го звена) и для
R5=[W(:,5) W(:,10) W(:,15)] %5-ти положений звеньев манипулятора.
plot(R1(1,:),R1(2,:),R1(1,:),R1(2,:),'*',R2(1,:),R2(2,:),...
R2(1,:),R2(2,:),'*',R3(1,:),R3(2,:),R3(1,:),R3(2,:),'*',...
R4(1,:),R4(2,:),R4(1,:),R4(2,:),'*',R5(1,:),R5(2,:),...
R5(1,:),R5(2,:),'*'),grid %Построение графика.
Результаты решения в среде MATLAB.
Вариант 1.
ZA =
9 7 5 3 1 %Значения заданной траектории движения
1 3 5 7 9 %груза в координатах х,y.
ans =
39.4384 65.3175 89.9613 108.9203 116.7581 %Матрица углов α
105.7092 83.8965 76.5841 83.8965 105.7092 %и β в радианах.
ans =
9.0000 7.0000 5.0000 3.0000 1.0000 %Матрица координат х,у.
1.0000 3.0000 5.0000 7.0000 9.0000
W =
Columns 1 through 7
0 0 0 0 0 4.7846 2.5871
0 0 0 0 0 3.9355 5.6292
Columns 8 through 14
0.0042 -2.0088 -2.7892 9.0000 7.0000 5.0000 3.0000
6.1952 5.8605 5.5318 1.0000 3.0000 5.0000 7.0000
Column 15
1.0000 %Матрица 5-ти положений звеньев манипулятора
9.0000 %в координатах X и Y.
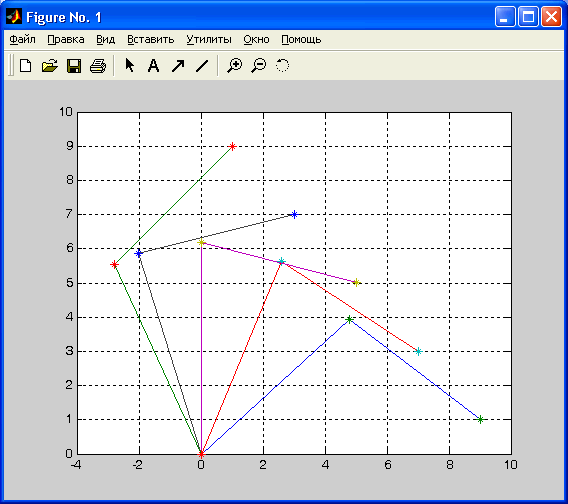
Рис. 2.5 График положений двухзвенного манипулятора
Таблица 2.3
Варианты заданий для лаб. работы № 2
№ Варианта задания |
ZA |
1 |
[4.8 6.4 7 6.4 4.8; -4.2 -2.4 0 2.4 4.2] |
2 |
[4.8 6.4 7 6.4 4.8; -4.2 -2.4 0 2.4 4.2] |
3 |
[3.2 6.4 7 6.4 3.2; -4.3 -2.0 0 2.0 4.3] |
4 |
[2.4 5 6 5 3.6; -9.1 -4 0 4 7] |
5 |
[1.3 1.6 3.2 4.8 6.4; 8.9 8.8 8.4 7.4 5.5] |
6 |
[0.5 2.6 3.2 4.8 5.4; -7.9 -6.8 0.4 3.4 1.5] |
7 |
[1.5 1.6 2.2 3.8 4.4; 0.9 1.8 2.4 3.4 5.5] |
8 |
[2.3 3.6 4.2 6.8 8.4; 7.9 6.8 5.4 3.4 1.5] |
9 |
[1 2 3 6 7; 8 6 4 2 0.5] |
10 |
[8.5 6.6 2.2 1.8 0.4; 8.9 5.8 0.4 -3.4 -1.5] |
11 |
[5.8 6.4 7.5 6.4 4.8; -4.2 -2.4 0 2.4 4.2] |
12 |
[-3.2 -6.4 -7 -6.4 -3.2; 7.3 4.0 0 -2.0 -4.3] |
13 |
[-1.4 -5.7 -6.4 -5 -2.6; -9.1 -4 0 4 7] |
14 |
[-1.5 -1.6 -2.2 -3.8 -4.4; -0.9 -1.8 -2.4 -3.4 -5.5] |
15 |
[5.8 6.4 7.5 6.4 4.8; -0.9 -1.8 -2.4 -3.4 -5.5] |
%Матрицы координат X,Y:
R1 =
0 4.7846 9.0000 %для 1-го положения звеньев а1, а2.
0 3.9355 1.0000
R2 =
0 2.5871 7.0000 %для 2-го положения звеньев а1, а2.
0 5.6292 3.0000
R3 =
0 0.0042 5.0000 %для 3-го положения звеньев а1, а2.
0 6.1952 5.0000
R4 =
0 -2.0088 3.0000 %для 4-го положения звеньев а1, а2.
0 5.8605 7.0000
R5 =
0 -2.7892 1.0000 %для 5-го положения звеньев а1, а2.
0 5.5318 9.0000