

1.3. Микрпопроцессорные устройства систем управления
Микропроцессор (МП) — программно-управляемое устройство, осуществляющее процесс обработки цифровой информации и управление им, построенное на одной или нескольких БИС/СБИС.
В обычных цифровых устройствах — последовательностных или комбинационных — обработка входных сигналов осуществляется аппаратно, и результат определяется схемой соединения различных элементарных узлов — конъюнкторов, дизъюнкторов, триггеров и т. д. В МП процесс обработки информации осуществляется программно, т.е. путем последовательного выполнения элементарных действий — команд программы, и результат обработки определяется этой программой. Решаемая задача, таким образом, задается программой, а сами аппаратные средства (микропроцессор и набор дополнительных ИС) остаются неизменными. Это определяет универсальность устройств и систем на основе МП.
Электронные системы, главным вычислительно-управляющим узлом которых является микропроцессор, стали называться микропроцессорными системами.
В составе микропроцессорной системы всегда можно выделить микроЭВМ и набор устройств ввода/вывода информации (поскольку они находятся за пределами микроЭВМ их называют внешними устройствами (ВУ)). Кроме микропроцессора в микро-ЭВМ входят также память и устройства, непосредственно взаимодействующие с внешними устройствами. Набор микросхем, пригодных для совместного применения в составе микроЭВМ, называют микропроцессорным комплектом БИС/СБИС (МПК). Микросхемы, входящие в МПК, могут быть выполнены по различным технологиям, но они должны быть совместимы по архитектуре, электрическим параметрам, конструктивным признакам.
1.3.1. Архитектура микропроцессора
Понятие архитектуры микропроцессора определяет его составные части, а также связи и взаимодействие между ними. Архитектура включает:
структурную схему МП;
программную модель МП (описание функций регистров);
информацию об организации памяти (емкость и способы адресации памяти);
описание организации процедур ввода/вывода.
Существуют два основных типа архитектуры — фоннеймановская и гарвардская.
Фоннеймановскую архитектуру (рис. 1.3.1, а) предложил в 1945 году американский математик Джо фон Нейман. Особенностью этой архитектуры является то, что программа и данные находятся в общей памяти, доступ к которой осуществляется по одной шине данных и команд.
Гарвардская архитектура впервые была реализована в 1944 году в релейной вычислительной машине Гарвардского университета (США). Особенностью этой архитектуры является то, что память данных и память программ разделены и имеют отдельные шину данных и шину команд (рис. 1.3.1, б), что позволяет повысить быстродействие МП системы.
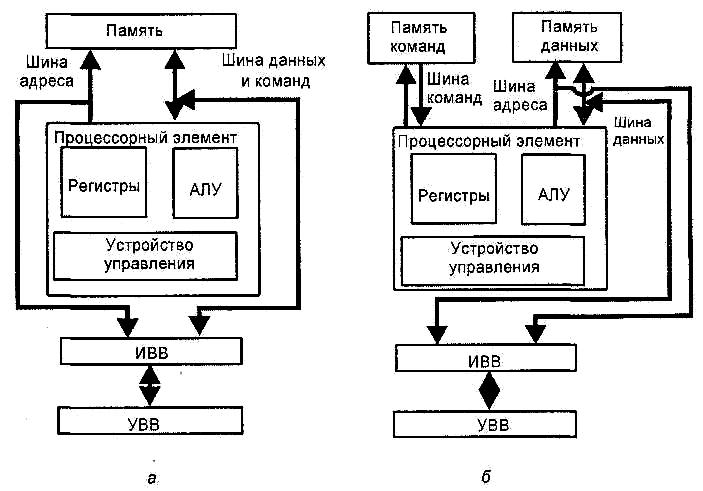
Рис. 1.3.1. Основные типы архитектуры: а — фоннеймановская; б — гарвардская
1.3.2. Структура и принципы работы микропроцессорной системы
Структура любой микропроцессорной системы является магистрально-модульной с микропрограммным управлением. Это означает, что в ней можно выделить набор модулей — устройств, подключенных к общим магистралям, называемых шинами. Под шиной понимают набор линий связи, по которым передается информация определенного типа, осуществляется обмен информацией между различными модулями системы.
Принцип магистральности определяет характер связей между функциональными блоками МПС – все блоки соединяются с единой системной шиной.
Шина – это информационный канал, который объединяет все функциональные блоки МПС и обеспечивает обмен данными в виде двоичных чисел. Конструктивно шина представляет собой n проводников-каналов и один общий проводник (земля). Данные по шине передаются в виде слов, которые являются группами бит.
В параллельной шине n бит информации передаются по отдельным линиям одновременно, в последовательной шине – по одной линии последовательно во времени.
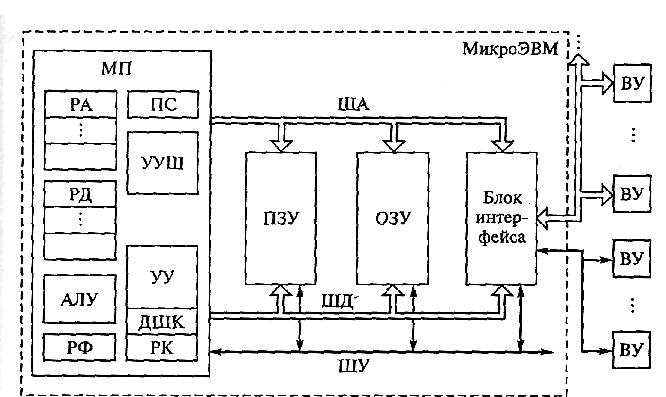
Рис. 1.3.2. Обобщенная структурная схема МПС
Шина адреса AB (Address Bus) является однонаправленной. Она предназначена для передачи адреса ячейки памяти или устройства ввода/вывода (I/O). Направление передачи по шине адреса – от МП к внешним устройствам (ВУ).
Ш
16
Шина управления CB (Control Bus) предназначена для передачи управляющих сигналов. Хотя направление управляющих сигналов может быть разным, однако шина управления не является двунаправленной, поскольку для сигналов разного направления используются отдельные линии. Обозначается эта шина так же, как и однонаправленная.
Принцип
модульности
МПС состоит в том, что система строится
на основе ограниченного количества
типов конструктивно и функционально
законченных модулей. Каждый модуль МПС
имеет вход управления третьим
(высокоимпедансным) состоянием. Этот
вход называется
![]() (Chip
Select)
– выбор кристалла, или
(Chip
Select)
– выбор кристалла, или
![]() (Output
Enable)
– разрешение выхода.
(Output
Enable)
– разрешение выхода.
В каждый момент времени к системной шине МПС подсоединено лишь два модуля – передающий и принимающий информацию. Остальные модули находятся в высокоимпедансном состоянии.
Принцип микропрограммного управления состоит в возможности осуществления элементарных операций – микрокоманд (сдвигов, пересылок информации, логических операций). Используя определенные комбинации микрокоманд, можно создать технологический язык, т.е. набор команд, который максимально соответствует назначению системы. В секционных процессорах набор микрокоманд можно изменить, используя другие микросхемы памяти микрокоманд.
Любая МПС может быть представлена как МикроЭВМ и набор внешних устройств (ВУ). Под внешними устройствами понимают устройства двух типов:
Устройства ввода/вывода информации, обеспечивающие вычислительный процесс и связь с оператором (монитор, клавиатура, внешние запоминающие устройства и т.д.)
Устройства, обеспечивающие управление техническими средствами технологического оборудования, станками и т.п.
ВУ в зависимости от способа передачи информации разделяют на две большие группы: устройства, обменивающиеся параллельными словами данных, и устройства, обменивающиеся информацией в последовательном коде, т.е. последовательно, бит за битом.
Кроме МП, который также называют центральным процессорным элементом, в состав микроЭВМ входят ПЗУ, ОЗУ и блок интерфейса.
ПЗУ обеспечивает хранение неизменяемых программ работы системы. Если это универсальная система типа персонального компьютера, то в ПЗУ хранится программа базовой системы ввода/вывода (I/O), обеспечивающая функционирование и начальную загрузку системы – инициализацию. Если это специализированная система, типа устройства числового программного управления (ЧПУ), то в ПЗУ заносится все программное обеспечение системы.
ОЗУ предназначено для хранения информации, которая может изменяться в процессе работы системы. Это могут быть данные, промежуточные результаты вычислений и программы, исполняемые в текущий момент времени. В простых системах это только входная информация и промежуточные результаты.
Память организована в виде массива ячеек, каждая из которых описывается своим адресом и содержит байт или слово. Байтом называется последовательность из 8 бит, а слово может иметь любую длину в битах. Наиболее часто под словом понимают двоичное число длиной два байта. Для обращения к ячейке памяти необходимо выдать ее адрес на шину адреса.
Весь обмен информацией МП с ВУ осуществляется через Блок Интерфейса (интерфейсы ввода/вывода). ВУ передают данные из внешней среды в МП или ОЗУ или получают их из микроЭВМ. Для подключения ВУ к микропроцессорной системе его сигналы, скорость передачи информации, формат слов необходимо привести к стандартному виду, с которым работает МП. Все эти преобразования данных выполняются в интерфейсном блоке. Фактически блок интерфейса это набор различных узлов – адаптеров и контроллеров. Сложные ВУ, типа монитора или накопителей на магнитных дисках подключаются через контроллеры ВУ, которые обеспечивают не только преобразование данных, но и управление самими ВУ.
Основными узлами МП являются:
Устройство управления (УУ) – вырабатывает серию импульсов, обеспечивающих последовательное и слаженное срабатывание узлов МП в соответствии с выполняемой командой.
Регистр команд (РК) – обеспечивает хранение команды, в течение всего цикла ее исполнения.
Дешифратор команд (ДШК) – выполняет расшифровку кода исполняемой команды.
Арифметико-логическое устройство (АЛУ) – обеспечивает выполнение всех операций, с помощью которых осуществляется переработка данных в МП. Оно может выполнять несложные арифметические, логические и сдвиговые операции. Перечень операций, выполняемых АЛУ, зависит от типа МП. Сложные арифметические операции, такие как умножение и деление, АЛУ не выполняет. В зависимости от результата операции АЛУ формирует признаки результата, называемые флажками. Эти признаки используются не в текущей, а в последующих командах.
Регистр флажков/флагов (РФ) – используется для хранения признаков результата операции.
Регистры адреса и данных (РА, РД) – РА используются для временного хранения двоичных чисел, с помощью которых МП вычисляет адреса ячеек памяти, к которым он обращается в процессе работы. РД используются как для непосредственного хранения операндов, так и для вычисления адресов ячеек ОЗУ, хранящих операнды. Через РД также осуществляется обмен информацией между МП и ВУ.
Программный счетчик (ПС) – служит для хранения адреса ячейки ПЗУ, в которой хранится очередная исполняемая команда программы.
Выполняя программу, МП обрабатывает команду за командой, которые обычно располагаются в ячейках памяти последовательно одна за другой. Команда задает выполняемую операцию и содержит сведения, где находятся операнды. Выполнение команды можно разбить на две фазы:
Фаза выборки. МП выставляет на ША содержимое ПС, хранящего адрес ячейки ПЗУ с очередной командой. Содержимое ячейки выставляется на ШД, МП считывает информацию с ШД и помешает команду в РК.
Фаза исполнения. Сначала МП готовит операнды. Операнды могут храниться как в самом МП так и в ОЗУ.
В первом случае они хранятся в РД, и МП может переходить к непосредственному выполнению математической или логической операции в соответствии с кодом команды.
Во втором случае МП должен сначала вычислить адрес ячейки ОЗУ, хранящей операнд, потом выставить этот адрес на ША и считать содержимое указанной ячейки ОЗУ, и только затем выполнить операцию в АЛУ. После выполнения операции в АЛУ результат помещается на место первого операнда. Если это один из внутренних регистров МП, результат сразу же переписывается в этот регистр, если это ячейка ОЗУ, требуется еще один цикл обращения к памяти. Таким образом, время исполнения команды зависит от количества циклов обращения к памяти, и самыми короткими являются те команды, в которых операнды хранятся непосредственно в МП.
Во время выполнения команды при каждом обращении МП к памяти программ содержимое ПС автоматически увеличивается на единицу. Для этого в структуру МП вводят схему инкремента/декремента, которая выполняет операцию добавления/отъема единицы без участия АЛУ. Команды могут занимать не только одну ячейку памяти, а две и даже три, при этом, чтобы считать всю команду, МП должен несколько раз обратиться к памяти программ. В результате в конце выполнения команды в ПС уже хранится адрес следующей, и МП готов к выполнению очередной команды.
Регистр ПС хранит адрес следующей выполняемой команды только в случае естественного порядка следования команд программы – команда за командой. В случае наличия в программе команд условного или безусловного перехода естественный порядок следования команд нарушается. При выполнении условия в условном переходе или наличии команды безусловного перехода в ПС загружается адрес ячейки памяти программ, куда требуется совершить переход. При невыполнении условия в условном переходе ПС выполняет команды в порядке естественного следования. Проверка тех или иных условий в МП обычно заключается в анализе признаков результата, которые были сформированы при исполнении предыдущей команды и сохранены в РФ.
В процессе работы МП постоянно обращается к ША и ШД. Передача информации внутри МП осуществляется по внутренним шинам, которые непосредственно не связаны с внешними шинами и работают на частоте МП. Для передачи адресов и данных из МП во внешние шины и приема данных с ШД в МП необходимо буферное устройство, которым служит устройство управления шинами (УУШ). В простейшем случае – это набор буферных регистров, управляемых УУ. Буферный регистр адреса принимает данные с внутренней шины и хранит его в течение цикла обращения к памяти или ВУ, при этом адрес через выходные каскады регистра выставляется на ША. Буферный регистр данных – двунаправленный и может как передавать данные с внутренней шины во внешнюю, так и принимать их с внешней ШД и передавать во внутреннюю. Эти регистры имеют третье состояние (высокоимпедансное) и переводятся в него, когда МП с ША и ШД не работает. В более сложных МП в состав УУШ помимо буферных входит набор внутренних регистров, некоторые адресные регистры и комбинационные схемы. Такое УУШ работает самостоятельно, обеспечивая взаимодействие МП с внешними шинами.