

1.3. Активные силы и реакции связей
Условимся называть тело свободным, если его перемещения ничем не ограничены. Тело, перемещения которого ограничены другими телами, называется несвободным, а тела, ограничивающие перемещения данного тела, связями. Как уже упоминалось, в точках контакта возникают силы взаимодействия между данным телом и связями. Силы, с которыми связи действуют на данное тело, называются реакциями связей. При перечислении всех сил, действующих на данное тело, необходимо, разумеется, учитывать и эти контактные силы (реакции связей).
В механике принимают следующее положение, называемое иногда принципом освобождаемости: всякое несвободное тело можно рассматривать как свободное, если действие связей заменить реакциями их, приложенными к данному телу.
В статике полностью определить реакции связей можно с помощью условий или уравнений равновесия тела, которые будут установлены в дальнейшем, но направления их во многих случаях можно определить из рассмотрения свойств связей.
Рис. 1.14 |
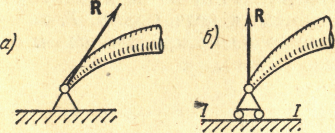
В качестве простейшего примера на рис. 1.14, а представлено тело, точка М которого соединена с неподвижной точкой О при помощи стержня, весом которого можно пренебречь; концы стержня имеют шарниры, допускающие свободу вращения. |

В данном случае для тела связью служит стержень ОМ; стеснение свободы перемещения точки М выражается в том, что она вынуждена находиться на неизменном удалении от точки О. Но, как мы видели выше (см. рис. 1.5 б), сила действия на такой стержень должна быть направлена по прямой ОМ, и согласно аксиоме 4 сила противодействия стержня (реакция) должна быть направлена вдоль той же прямой. Таким образом, направление реакции стержня совпадает с прямой ОМ (рис. 1.14 б).
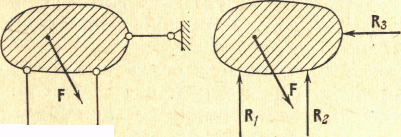
(В случае криволинейного невесомого стержня – по прямой, соединяющей концы стержня; см. рис. 1.5 б). Аналогично сила реакции гибкой нерастяжимой нити должна быть направлена вдоль нити. На рис. 1.15 |
Рис. 1.15. |

показано
тело, висящее на двух нитях, и реакции
нитей
![]() и
и
![]() .
.
Возвращаясь к общему случаю, отметим, что силы, действующие на несвободное тело (или на несвободную материальную точку), можно разделить на две категории. Одну категорию образуют силы, не зависящие от связей, а другую категорию – реакции связей. При этом реакции связей, в сущности, носят пассивный характер – они возникают лишь постольку, поскольку на тело действуют те или иные силы первой категории. Поэтому силы, не зависящие от связей, называют активными силами (иногда они называются заданными), а реакции связей – пассивными силами.
На рис. 1.16, а вверху показаны две равные по модулю активные силы и , растягивающие стержень АВ, внизу показаны реакции и растянутого стержня. На рис. 1.16 б |
Рис. 1.16. |
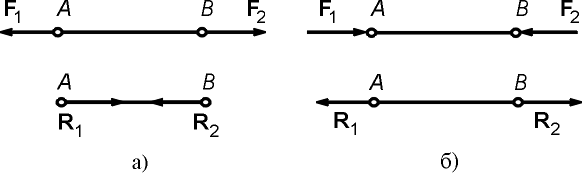
вверху показаны активные силы и , сжимающие стержень, внизу показаны реакции и сжатого стержня.
Рассмотрим еще некоторые типичные виды связей и укажем возможные направления их реакций; конечно, модули реакций определяются активными силами и не могут быть найдены, пока последние не заданы определенным образом. При этом мы будем пользоваться некоторыми упрощенными представлениями, схематизирующими действительные свойства реальных связей.
|
|
|
а) |
б) |
в) |
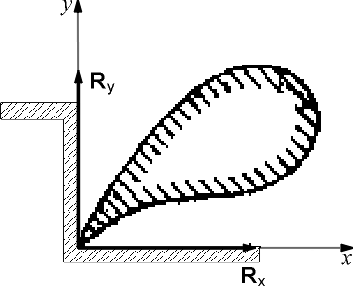
Рис. 1.17. |
||
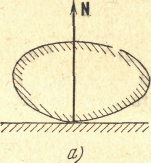

1. Если твердое тело опирается на идеально гладкую (без трения) поверхность, то точка контакта тела с поверхностью может свободно скользить вдоль поверхности, но не может перемещаться в направлении вдоль нормали к поверхности. Реакция идеально гладкой поверхности направлена по общей нормали к соприкасающимся поверхностям (рис. 1.17 а).
Если твердое тело имеет гладкую поверхность и опирается на острие (рис. 1.17 б), то реакция направлена по нормали к поверхности самого тела.
Если
твердое тело упирается острием в угол
(рис. 1.17 в), то связь препятствует
перемещению острия как по горизонтали,
так и по вертикали. Соответственно
реакция
угла может быть представлена двумя
составляющими – горизонтальной
![]() и вертикальной
и вертикальной
![]() ,
величины и направления которых,
в конечном счете, определяются заданными
силами.
,
величины и направления которых,
в конечном счете, определяются заданными
силами.
|
|
Рис. 1.18. |
|
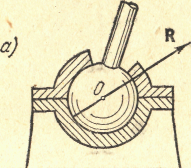

2. Сферическим шарниром называется устройство, изображенное на рис. 1.18 а, которое делает неподвижной точку О рассматриваемого тела. Если сферическая поверхность контакта идеально гладкая, то реакция сферического шарнира имеет направление нормали к этой поверхности. Поэтому единственное, что известно относительно реакции, – это то, что она проходит через центр шарнира О; направление реакции может быть любым и определяется в каждом конкретном случае в зависимости от заданных сил и общей схемы закрепления тела. Точно так же нельзя заранее определить направление реакции подпятника, изображенного на рис. 1.18 б.
3. Цилиндрическая шарнирно-неподвижная опора (рис. 1.19 а). Реакция такой опоры проходит через ее ось, причем направление реакции может быть любым (в плоскости, перпендикулярной оси опоры). |
Рис. 1.19. |
4. Цилиндрическая шарнирно-подвижная опора (рис. 1.19 б) препятствует перемещению закрепленной точки тела по перпендикуляру к плоскости; соответственно реакция такой опоры также имеет направление этого перпендикуляра.
Рис. 1.20. |
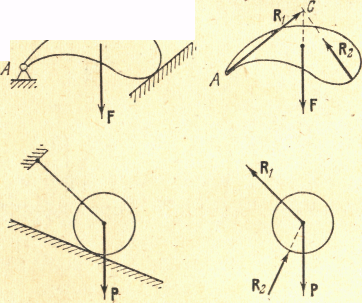
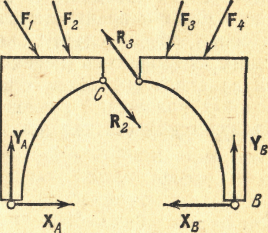
На одно и то же тело может быть наложено одновременно несколько связей, возможно, различного типа. Три примера такого рода представлены на рис. 1.20 а. На рис. 1.20 б изображены соответствующие системы сил; здесь, в соответствии с принципом освобождаемости, связи отброшены и заменены реакциями. Реакции стержней направлены вдоль стержней (верхняя схема); при этом предполагается, что стержни невесомы и соединены с телом и опорами с помощью шарниров. Реакции идеально гладких опорных поверхностей направлены по нормали к этим поверхностям (две нижние схемы). Кроме того, реакция цилиндрического шарнира в точке А (средняя схема) должна на основании теоремы о трех непараллельных силах проходить через точку пересечения линий действия сил и – точку С. Реакция идеально гибкой нерастяжимой и невесомой нити направлена вдоль нити (нижняя схема).
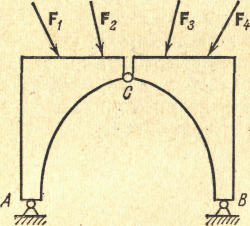
В
механических системах, образованных
путем сочленения нескольких твердых
тел, наряду с внешними связями (опорами)
имеются внутренние
связи. В
этих случаях иногда мысленно расчленяют
систему и заменяют отброшенные не только
внешние, но и внутренние связи
соответствующими реакциями. Один пример
такого рода, в котором два тела соединены
шарниром С,
представлен на рис. 1.21. Отметим, что
силы
и
![]() равны друг другу по модулю, но противоположно
направлены (по аксиоме 4).
равны друг другу по модулю, но противоположно
направлены (по аксиоме 4).
|
|
Рис. 1.21. |
|
В заключении этого параграфа отметим, что силы взаимодействия между отдельными точками данного тела называются внутренними, а силы, действующие на данное тело и вызванные другими телами, называются внешними. Из этого следует, что реакции связей являются для данного тела внешними силами.