

10 Настройка контура позиционирования
Рассмотрим контур позиционирования:

Рисунок 10.1 - Контур позиционирования
Частотные характеристики и переходный процесс такого некорректированного контура (без промежуточного усилителя и регулятора положения) имеют вид:
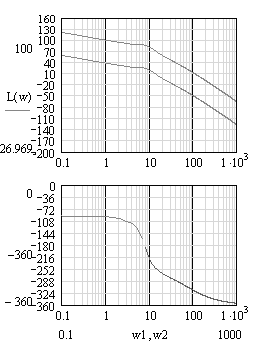
Рисунок 10.2 - ЛАХ и ЛФХ некорректированного контура положения

Рисунок 10.3 – Переходный процесс некорректированного контура положения
Т.к. коэффициент разомкнутой системы равен 1350, а требуемый коэффициент должен быть равен 1200000, то принимаем коэффициент промежуточного усилителя
Реализация промежуточного усилителя на базе операционного усилителя:

Рисунок 10.4 - Реализация промежуточного усилителя
R2/R1=1000, примем R2=1 Мом, тогда R1=1 кОм.
Как видно, система является неустойчивой, т.к. график ЛФХ пересекает -180 градусов раньше, чем ЛАХ пересекает 0. Для достижения нужных свойств (точности и времени переходного процесса) в контуре положения применим ИД-регулятор, передаточная функция которого:
Применение ИД регулятора обусловлено тем что не изменяя Крс, необходимо изменить наклон ЛАХ

Рисунок 10.5
Техническая реализация такого регулятора приведена на рисунке.

Рисунок 10.6 - Реализация регулятора положения
Где: T1=R1*C2, T2=(1+C1/C2)*T1
Примем С2=100 пФ, тогда R1=1 МОм, С1=10 мкФ
Применив такой регулятор, получаем следующие логарифмические характеристики:

Рисунок 10.7 - ЛАХ и ЛФХ корректированного контура положения

Рисунок 10.8 – Переходный процесс корректированного контура положения

Рисунок 10.9 - ЛАХ и ЛФХ корректированного контура положения
Как видно из графиков, запас устойчивости по модулю порядка 15 дб, по фазе порядка 50 градусов.
11 Структурная схема сар положения
Структурная схема САР положения будет выглядеть следующим образом:
 ,
,
Рисунок 11.1 - Структурная схема САР положения
12 Исследование и анализ переходных процессов
При отсутствии момента сопротивления и подаче задающего напряжения 10 В, соответствующего 5 миллиметрам перемещения механизма, переходный процесс имеет следующий вид:

Рисунок 12.1
Время переходного процесса 15 секунд, перерегулирование составляет 40%.
Ток якоря:

Рисунок 12.2
При появлении максимального момента сопротивления на 20 секунде, график переходного процесса примет вид:

Рисунок 12.3
 Рисунок 12.4
Рисунок 12.4

Рисунок 12.5
Как видно из графиков, выходная координата отклоняется на 0.0005 миллиметра, что соответствует заданным параметрам качества (<=0.002 миллиметра).
При ступенчатом периодическом изменении момента сопротивления от 0 до максимального (2.06 Нм) переходный процесс выглядит следующим образом:

Рисунок 12.5
Как видно, отклонение выходной координаты (перемещения) в пределах заданной точности.
Ток якоря:

Рисунок 12.6
13 Заключение
В результате проектирования был разработан автоматизированный электропривод следящей системы, обеспечивающей заданную точность слежения механизма при повторно-кратковременном режиме работы, максимальном моменте сопротивления. Исследованы и проанализированы переходные процессы при различных режимах работы системы.
Спроектированная система удовлетворяет всем поставленным требованиям.