

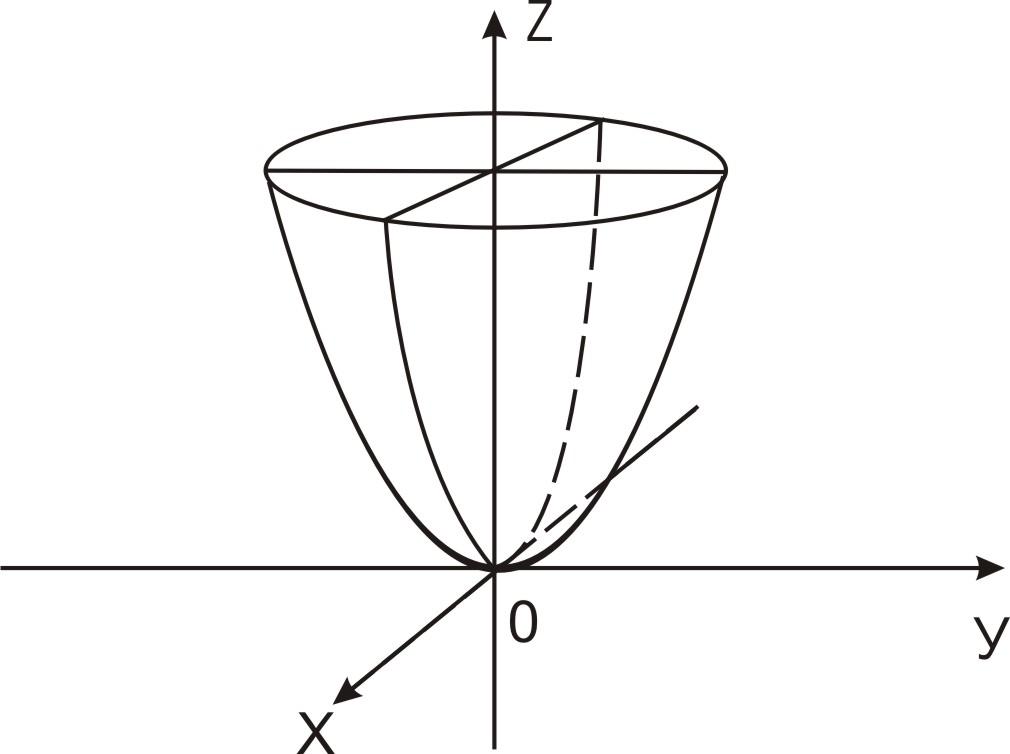
Параболоид
Эллиптический параболоид.
z=ах2+by2 (а,b>0).
Гиперболический параболоид.
z=-ax2+by2 (a,b>0)

69
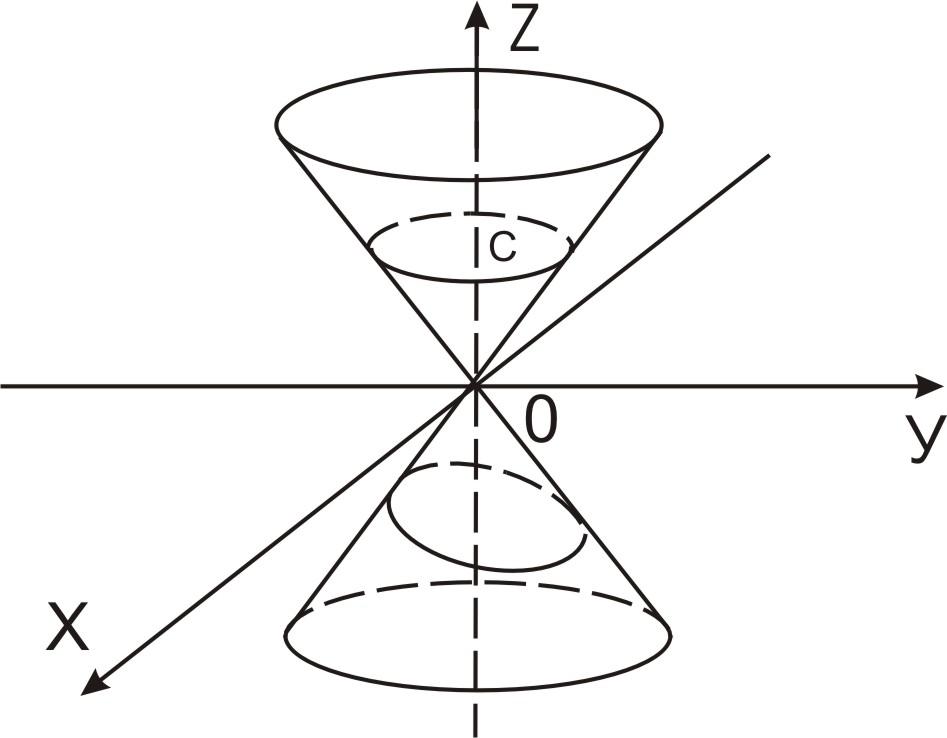
Гиперболоид.
Однополостный гиперболоид:
![]()

Каноническое
уравнение двухполоcного
гиперболоида
имеет вид:![]()
![]()

68
Линейные операции над векторами.
Определение.
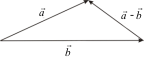
Суммой
![]() +
+![]() векторов
векторов
![]() и
и
![]() называется вектор, проведенный из начала
называется вектор, проведенный из начала
![]() к концу
к концу
![]() ,
если конец
,
если конец
![]() и начало
и начало
![]() совпадают. Приведенное определение
сложения векторов называется правилом
треугольника.
Векторы
совпадают. Приведенное определение
сложения векторов называется правилом
треугольника.
Векторы
![]() и
и
![]() можно складывать, пользуясь правилом
параллелограмма.
можно складывать, пользуясь правилом
параллелограмма.


Если
имеется n
векторов
![]() ,
то их сумма определяется как вектор
,
то их сумма определяется как вектор![]() .
.

Определение.
Разностью
векторов
![]() и
и
![]() называется такой вектор
называется такой вектор
![]() =
=![]() -
-![]() ,
что выполняется равенство
,
что выполняется равенство
![]() +
+![]() =
=![]() .
.
Легко
показать, что для любого вектора
![]() ,
существует такой единственный вектор
,
существует такой единственный вектор
![]() ,
называемый противоположным
вектору
,
называемый противоположным
вектору
![]()
что
![]() +
+![]() =
=![]() .
Вектор, противоположный вектору
.
Вектор, противоположный вектору
![]() ,
будем обозначать –
,
будем обозначать –![]() .
.
Определение.
Произведением
вектора
![]() на число λ (λ
на число λ (λ![]() 0)
называется вектор
0)
называется вектор
![]() =λ
=λ![]() ,
удовлетворяющий следующим условиям:
,
удовлетворяющий следующим условиям:
1)
векторы
![]() и
и
![]() одинаково направлены, если λ>0, и
противоположно направлены, если λ<0;
одинаково направлены, если λ>0, и
противоположно направлены, если λ<0;
2) |![]() |=|λ||
|=|λ||![]() |.
|.
5
По
определению, произведение произвольного
вектора
![]() на число 0 есть нулевой вектор, т.е. 0
на число 0 есть нулевой вектор, т.е. 0![]() =
=![]() .
.
Введенные операции сложения векторов и умножение вектора на число называются линейными. Они обладают следующими свойствами:
1) сложение векторов коммутативно:
![]() +
+![]() =
=![]() +
+![]() ,
,
![]() ,
,![]() ;
;
2) сложение векторов ассоциативно:
(![]() +
+![]() )+
)+![]() =
=![]() +(
+(![]() +
+![]() ),
),
![]() ,
,![]() ,
,![]() ;
;
3)
![]() +
+![]() =
=![]() ,
,
![]() ;
;
4)
![]() +(-
+(-![]() )=0,
)=0,
![]() ;
;
5) умножение вектора на число ассоциативно:
α
(β
![]() )
= (α β)
)
= (α β)![]() ,
,
![]()
α, β
R;
α, β
R;
6)
1![]() =
=![]() ,
,
![]() ;
;
7) умножение вектора на число дистрибутивно по отношению к
сложению чисел:
(α+β)![]() =α
=α![]() +β
+β![]() ,
,
![]() ,
α, β
R;
,
α, β
R;
8) умножение вектора на число дистрибутивно по отношению к сложению векторов:
α(![]() +
+![]() )=α
)=α![]() +α
+α![]() ,
,
![]() ,
,![]() ,
α
R;
,
α
R;
Множество
всех векторов пространства (плоскости),
удовлетворяющих свойствам 1) – 8),
называется линейным,
или векторным
пространством,
и обозначается
![]() (
(![]() ).
).

Теорема
(необходимое
и достатаочное условие коллинеарности
двух векторов).
Для того чтобы векторы
![]() и
и
![]() были коллинеарны, необходимо и достаточно,
чтобы существовало λ, удовлетворяющее
условию:
были коллинеарны, необходимо и достаточно,
чтобы существовало λ, удовлетворяющее
условию:
![]() =
λ
=
λ![]() .
.
Проекции.
Назовем осьюпрямую, на которой указано направление, которое будем называть положительным.
6
Поверхности вращения
Определение. Поверхность называется поверхностью вращения, если она вместе с каждой своей точкой содержит и всю окружность, полученную вращением этой точки вокруг некоторой фиксированной прямой, называемой осью вращении.
Пусть на плоскости YOZ задана кривая линия l уравнением вида
F(y,z)=0

Тогда уравнение поверхности вращения, образованной вращением кривой l вокруг оси OZ имеет вид:
![]()
Эллипсоид
![]()
67

Если вершина совпадает с началом прямоугольной системы координат OXY, а направляющей служит эллипс:
![]()
То уравнение конической поверхности имеет вид:
![]()
– уравнение конической поверхности

66
Пусть
l
- некоторая ось, α - плоскость, непараллельная
оси l.
Через произвольную точку А пространства
проведем плоскость α'||α
и обозначим точку пересечения плоскости
α' c
осью l
через А1.
Тогда точка А1
называется проекцией
точки
А на
ось l
относительно плоскости
α.
В частности, если α![]() l,
то проекция называется прямоугольной,
или ортогональной.
l,
то проекция называется прямоугольной,
или ортогональной.


Пусть
теперь задан вектор
![]() .
Возьмем проекции А1
и В1
точек А и В на ось l
относительно
плоскости α.
.
Возьмем проекции А1
и В1
точек А и В на ось l
относительно
плоскости α.
Тогда
вектор
![]() называется проекцией
вектора
называется проекцией
вектора
![]() на
ось l
относительно плоскости
α.
Величиной
проекции
вектора
на
ось l
относительно плоскости
α.
Величиной
проекции
вектора
![]() на осьl
относительно
плоскости α называется число, равное:
на осьl
относительно
плоскости α называется число, равное:
а)
|![]() |,
если направление вектора
|,
если направление вектора
![]() совпадает с направлением оси l;
совпадает с направлением оси l;
б)
- |![]() |,
если направление
|,
если направление
![]() противоположно направлено оси l.
противоположно направлено оси l.
Обычно
из контекста ясно о проекции относительно
какой плоскости идет речь. Поэтому
величину проекции вектора
![]() на осьl
будем обозначать Прl
на осьl
будем обозначать Прl![]() ,
а для ортогональной проекции использовать
обозначение Прl
,
а для ортогональной проекции использовать
обозначение Прl![]() .
.
П усть
α - некоторая плоскость иl– прямая, такая, чтоlне параллельна α. Через произвольную
точку А пространства проведем прямуюl1||lи обозначим точку пересечения прямойl1с плоскостью
α через А1. Точка А1называетсяпроекцией точки А
на плоскость α
относительно прямой
l.
усть
α - некоторая плоскость иl– прямая, такая, чтоlне параллельна α. Через произвольную
точку А пространства проведем прямуюl1||lи обозначим точку пересечения прямойl1с плоскостью
α через А1. Точка А1называетсяпроекцией точки А
на плоскость α
относительно прямой
l.
7
Если
прямая l![]() α,
то проекция называется прямоугольной,
или ортогональной.
α,
то проекция называется прямоугольной,
или ортогональной.
Определение. Углом между двумя векторами, или между осями, или между вектором и осью называется наименьший угол α, на который надо повернуть один из векторов или одну из осей до совпадения по направлению с другим вектором или осью.
Из
определения следует, что 0![]() α
α![]() π.
Угол между векторами или между осями,
или между вектором и осью будем обозначать
соответственно: (
π.
Угол между векторами или между осями,
или между вектором и осью будем обозначать
соответственно: (![]() ),
(
),
(![]() ),
(
),
(![]() ).
).
Теорема. Проекция вектора на ось обладает следуицики свойствами:
1)
![]() ;
;
2)
![]()
3)
![]() .
.