

22. Измерительные цепи в виде неравновесных мостов
Основная идея построения неравновесных мостов состоит в исходной компенсации начального значения выходного сигнала, чтобы при Х=0 он был равен 0. Для этого к делителю R1, R2, содержащему преобразователь R1, добавляется еще один делитель R3, R4, с тем, чтобы напряжение на нагрузке Rн и ток Iн через нее при Х=0 отсутствовали. При отклонении Х от нуля и R1=R0±ΔR мост выходит из состояния равновесия, вследствие чего Iн=f1(x) и Uн=f2(x). Такую структуру измерительной цепи имеют не только электрические, но и магнитные, оптические и другие мосты, где подобная ситуация создается не для электрических токов, а магнитных, световых и других потоков.
Цепь неравновесного моста имеет больше возможностей, чем цепь в виде делителя, так как параметрические преобразователи могут быть включены в качестве одного, двух, или всех четырех плеч моста. Для уяснения этих возможностей рассмотрим свойства мостовых неравновесных цепей.
Состояние
равновесия, то есть состояние, когда
Iн=0,
устанавливается перед началом измерений
при Х=0.
Условием достижения равновесия является
![]() .
.
Выходной ток мостовой цепи определяется выражением:
![]()
где Е - напряжение питания моста или
![]()
где IE – ток питания моста
Функция преобразования неравновесного моста с дифференциальным преобразователем при условии, что в состоянии равновесия сопротивления всех плеч равны Ro, при заданном напряжении питания Е=const определяется выражением: UH=1/2
![]()
Линейность функции преобразователя соблюдается, так же как и для цепи в виде делителя, лишь при Rн=.
Если задан ток питания моста I=const, то функция преобразования линейна при любых Rн и определяется выражением:
![]() . (2.5
)
. (2.5
)
Функция преобразования моста с дифференциальным преобразователем, включенным в плечи R1 и R3 в режиме заданного Uпитания E=const принципиально нелинейна при любых Rн:
![]() , (2.6)
, (2.6)
а
в режиме заданного тока питания IE=const
линейна лишь при
![]() ,
,![]()
Чувствительность
мостовой цепи по напряжению при малых
изменениях сопротивлений плеч (=R/R<<1)
можно считать постоянной. Выходное
напряжение для равновесного моста при
Rн>>R0
определяется следующими формулами: для
моста с одним рабочим плечом при питании
заданным напряжением
![]() или при питании заданным током
или при питании заданным током![]() ;
для моста с двумя рабочими плечами
;
для моста с двумя рабочими плечами![]() или
или![]() и для моста с четырьмя рабочими плечами
и для моста с четырьмя рабочими плечами![]() или
или![]() .
Максимальная мощность в нагрузке
достигается при согласовании ее
сопротивления с выходным сопротивлением
моста, т.е.RH=Ri.
Выходное сопротивление моста при питании
его от источника напряжения с пренебрежимо
малым внутренним сопротивлением
определяется формулой
.
Максимальная мощность в нагрузке
достигается при согласовании ее
сопротивления с выходным сопротивлением
моста, т.е.RH=Ri.
Выходное сопротивление моста при питании
его от источника напряжения с пренебрежимо
малым внутренним сопротивлением
определяется формулой
![]()
Для
равноплечевого (![]() )
мостаRi=R0.
)
мостаRi=R0.
Напряжение источника питания определяется исходя из допустимой мощности преобразователя как:
![]() -
для последовательно-симметричного
моста и
-
для последовательно-симметричного
моста и
![]() -
для параллельно-симметричного моста.
-
для параллельно-симметричного моста.
На рис представлена схема неравновесного моста, которая питается от источника тока, выполненного на операционном усилителе DA1.
З десьUa=Uoп
при любых Rx,
=> учитываются основные свойства ОУ:
десьUa=Uoп
при любых Rx,
=> учитываются основные свойства ОУ:![]()
Напряжение в точке с током I2 и напряжением в точке б определяется по закону Ома.
![]()
![]()
![]()
Напряжение
на выходе моста Uвых=Uб-Uс
при R1=R2=R3=R
имеем
![]()
откуда![]()
![]() .
.
Таким образом, функция преобразования такого неуравновешенного моста линейна.
24. Измерительные цепи генераторных преобразователей.
Генераторный преобразователь характеризуется высокой ЭДС Е(х), являющейся функцией входной величины х, и внутренним сопротивлением Zi (рис. 2.1).

Рис.2.1. Схема генераторного преобразователя
Мощность, отдаваемая преобразователем в нагрузку или к следующему преобразователю, определяется через мощность короткого замыкания.
![]()
где
 является функцией
является функцией
![]() и
не зависит от Ri
и
RH.
и
не зависит от Ri
и
RH.
Величина показывает, насколько эффективно используется мощность преобразователя. Зависимость от а при изменении а от 10-3 до 103 представлена в логарифмическом масштабе на рис.2.2 и имеет максимум max=1/4 при а=1, т.е. при Ri=Rн.
Если
![]() - комплексные величины, то при
- комплексные величины, то при![]() кривая остается неизменной. При
кривая остается неизменной. При![]() ,
т.е. при одном - емкостном, а другом -
индуктивном сопротивлениях, кривая
имеет вид резонансной кривой. При
,
т.е. при одном - емкостном, а другом -
индуктивном сопротивлениях, кривая
имеет вид резонансной кривой. При![]() максимум=1/2.
максимум=1/2.
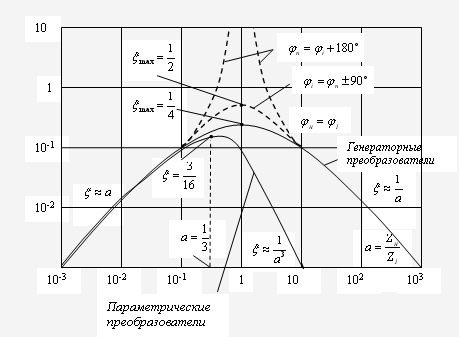
Рис.2.2. Зависимость ξ от параметра а в логарифмическом масштабе.
В ряде случаев приходится сознательно отступать от условий согласования. Чаще всего это делается ради уменьшения тех или иных погрешностей измерительной аппаратуры. Для термоэлектрического термометра, например, условием согласования является равенство сопротивлений Rтп + Rл = Rн, Rтп - сопротивление термопары; Rл - сопротивление соединительного провода (линии) и Rн сопротивление нагрузки (милливольтметр). Однако при соблюдении этого условия термометр будет иметь большую погрешность от измерения сопротивления линии Rл и термопары Rтп, которая может быть сведена к пренебрежимо малой величине при Rн >> R тп + R л.
В подобном же положении оказываются цепи, работающие с гальваническим преобразователями. Прохождение относительно больших токов (больше 1 мкА) через электролит гальванического преобразователя или нормального элемента вызывает явление поляризации на их электродах и тем самым изменяет результирующую ЭДС. Поэтому входные сопротивления цепей, работающих с такими преобразователями, выбираются равными Rн>1000Ri.
Пьезоэлектрический преобразователь и индукционный преобразователь имеют реактивные внутренние сопротивления, что приводит к зависимости выходного сигнала от частоты изменения входной величины Х. При этом для пьезоэлектрических преобразователей характерна частотная погрешность в области низких частот, а для индукционных в области высоких частот. Уменьшение частотных погрешностей и в том и в другом случае достигается при Rн > Zi.