

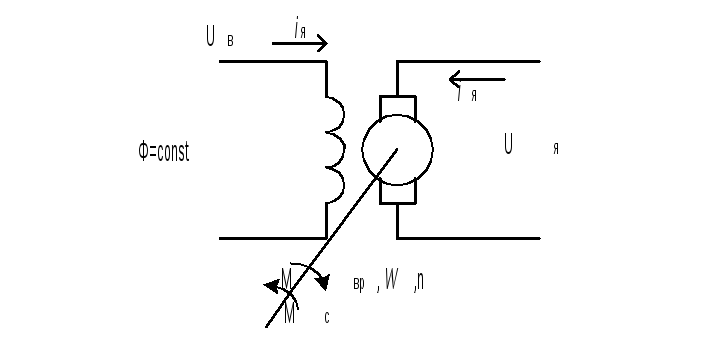
Задача экскаваторщика: управление двигателем постоянного
тока с использованием в качестве привода поворота
платформы экскаватора
Задача максимального быстродействия.
Задача максимума производительности (угол поворота стрелы должен быть как можно больше).
Задача минимума потерь.
Управляющим воздействием будет являться ток якоря двигателя. На него есть свои ограничения.
Если записать математическую модель:
![]()

![]()
![]()
![]()


 Введём
относительное время
Введём
относительное время
![]() ,
тогда
,
тогда
![]() (
1'
) y – управляющая
координата ~ α
(
1'
) y – управляющая
координата ~ α

![]() (
1 )
u
– управление
~ i
(
1 )
u
– управление
~ i

Математическая модель объекта
Ограничение на управление: | u | ≤ 1
![]() -
в начале
и в конце процесса двигатель не вращается
-
в начале
и в конце процесса двигатель не вращается
 краевые
условия:
краевые
условия:![]()
Задача на максимальное быстродействие
![]() (
2 ) – в качестве критерия оптимальности
(
2 ) – в качестве критерия оптимальности
![]() (
3 )
(
3 )
![]() (
4 )
(
4 )
![]() (
5 )
(
5 )
Надо найти такое управление u(t) и соответствующее ему в силу математической модели y'(t) – угловую скорость, чтобы минимизировать время Q при ограничениях (3), (4), (5).



![]()

Задача максимума производительности
![]() (
6 )
(
6 )
![]() (
7 )
(
7 )
![]() (
8 )
(
8 )
![]() (
9 )
(
9 )
Надо найти такое u(t) и соответствующее ему в силу системы уравнений (1) кривую скорости y'(t) , с тем, чтобы максимизировать функционал (6) при условиях (7), (8), (9).



![]()

Задача минимума потерь
![]() (
10 )
(
10 )
![]() (
11 )
(
11 )
![]() (
12 )
(
12 )
![]() (
13 )
(
13 )



![]()

Задача о безударной стыковке двух тел
( заправка самолёта в воздухе )
 (мишень)
(мишень)


ya
yb
(объект)
 τ
τ

![]()








 -1
0 +1 тяга
-1
0 +1 тяга
Рmin Pmax
Для Р есть специальные формулы пересчета.
Введем в рассмотрение разницу между координатами:
![]()
![]()
Введем
краевые условия:
![]()
На фазовой плоскости:

![]()
![]()

-a
![]()



![]()
 -b
-b
Задача оптимального управления консервативным объектом (задача крановщика)
 Необходимо перенести груз из одного
места в другое и при этом не раскачивая
его.
Необходимо перенести груз из одного
места в другое и при этом не раскачивая
его.
Общая постановка задач оптимального управления

![]() ,
,![]() ,
,![]()
Нам необходимо получить соответствующий закон на выходе управляющего устройства.
Так подобрать
![]() ,
чтобы было
,
чтобы было![]() при
ограничениях и условиях
при
ограничениях и условиях![]() и
и![]() .
.
Методы расчёта оптимального управления
Вариационное исчисление
Принцип максимума Понтрягина
Динамическое программирование Ричарда Белмана
Аналитическое конструирование оптимальных регуляторов
Нелинейное программирование
Вариационное исчисление
 I3
I2
I1
I3
I2
I1





y(x)

δ=max


Из всех кривых выбрать такую, чтобы как можно дальше и быстрее катиться.

![]()
![]()


 x(t)
x(t)
 1-5%
1-5%





tр







 у1
y(x)+δy(x)
у1
y(x)+δy(x)
![]()

 у0
у0



 x0
x1
x0
x1
![]() -
уравнение
Эйлера-Лагранжа
-
уравнение
Эйлера-Лагранжа

это необходимое и достаточное условие экстремума !
![]()
Найдем кратчайшее расстояние между двумя точками:

 dS
В
dS
В



 ∆у
∆у

 у(х)
у(х)
 А
А
 х0
∆х х1
х0
∆х х1




![]()
здесь числитель = 0
 или
знаменатель к бесконечности
или
знаменатель к бесконечности
![]()
Это была решена задача на безусловный экстремум.
Это нереальная задача.