

|
Министерство Путей Сообщения Российской Федерации
Московский Государственный Университет Путей Сообщения
Кафедра «Управление и информатика в технических системах»
курс лекций по предмету:
ОПТИМАЛЬНЫЕ И АДАПТИВНЫЕ СИСТЕМЫ
доцент кафедры : Монахов О.И.
Москва , 1999
|
Цель курса – обучить методам расчёта.
I Раздел – оптимальные системы.
Вариационное исчисление.
Принцип максимума.
Динамическое программирование.
Аналитическое конструирование оптимальных регуляторов.
Нелинейное программирование.
Актуальность курса
Необходимость курса обуславливается сложностью задач и систем по нелинейности, сложностью требований и ситуаций.
Для оптимальной системы требуется определить (обеспечить) экстремум какого-либо критерия оптимальности. Одним из примеров такого рода систем является система экстремального регулирования.
В оптимальной системе есть специальный регулятор, обеспечивающий минимум пере регулирования и времени регулирования.
Постановка задачи оптимального управления Ограничения : − на скорость движения
− на время движения
− критерий оптимальности – на дизельное топливо и
электроэнергию
Задача оптимального управления (тепловозом) заключается в том, чтобы соблюдая скорость и временные ограничения так сформировать управление (совокупность позиций контроллера машиниста), чтобы обеспечить минимум расхода топлива.
Неотъемлемыми элементами любой задачи управления являются:
критерий оптимальности
ограничения: - по времени (график движения)
- по скорости: постоянные
временные
математическая модель, адекватно описывающая процессы в реальном объекте
краевые (или начальные) условия:
управляющее
воздействие
![]() или
или
![]()
Надо
подобрать такое управление
![]() или
или
![]() ,
чтобы на данной математической модели
при соблюдении ограничений и при данных
краевых условиях обеспечить критерий
оптимальности.
,
чтобы на данной математической модели
при соблюдении ограничений и при данных
краевых условиях обеспечить критерий
оптимальности.
Рис.1
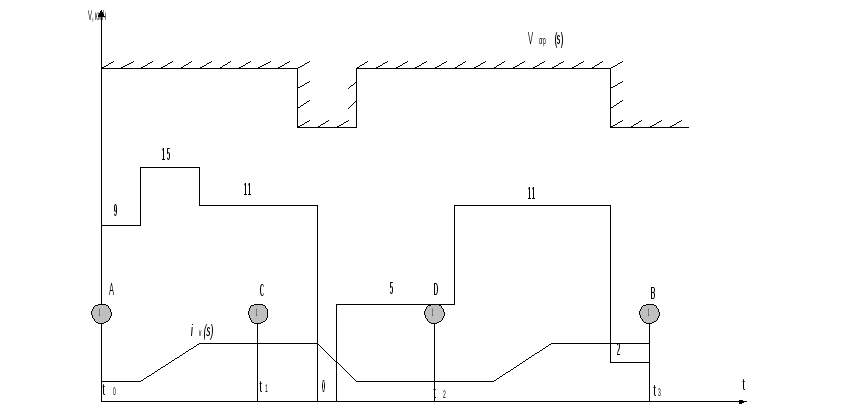
iк(s) – профиль пути
ti – графиковое время
Допущения к уравнениям движения подвижного состава:
масса поезда сосредоточена




P+Q P – вес локомотива
Q – вес состава
пренебрежение переходным процессом (с 1-ой позиции контроллера на 15-ую)
переходные процессы в регуляторе, электрической машине отсутствуют
Запишем математическую модель:
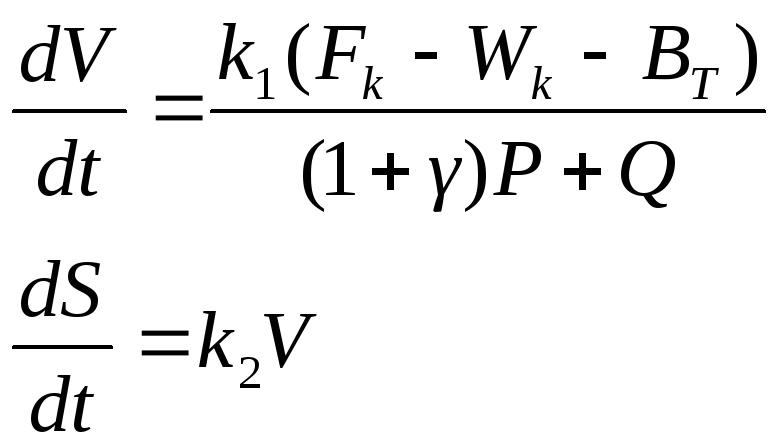 γ
≈ 0,15 ; k
=
127/(1+γ)
γ
≈ 0,15 ; k
=
127/(1+γ)
![]() -
сила тяги
(отнесена к колесу)
-
сила тяги
(отнесена к колесу)
![]() -
сила сопротивления движению (отнесена
к колесу)
-
сила сопротивления движению (отнесена
к колесу)
![]() -сила
торможения (отнесена к тормозным
колодкам)
-сила
торможения (отнесена к тормозным
колодкам)
Р ис.2
Семейство фазовых характеристик
ис.2
Семейство фазовых характеристик
силу тяги можно сосчитать по формулам, зная КПД или некоторые другие параметры или по семейству характеристик из учебника
сила сопротивления движению
удельное
сопротивление движения:
![]() ,
тогда
,
тогда
![]()


четыре шесть
осей
сила торможения – по правилам тяговых расчётов

 φ
φ
φ – коэффициент сцепления между колесом и
тормозом
 V
V
BT=f(φ,F)






BT
Критерий оптимальности:


G, kг/мин
V
Рис.3 Кривые часового или минутного расхода.
![]() -
в статике (учитывая динамику)
-
в статике (учитывая динамику)



Пк(t) объект B

 Пк(s)
мат. модель
Пк(s)
мат. модель
