

Операции над приказами
Кнопки операций над приказами находятся в верхней части пульта приказов:
«Стоп» – остановка приказа. При нажатии кнопки после завершения текущей выполняемой команды (или нескольких) приказ остановится.
«Пуск» – пуск приказа на исполнение после остановки, произошедшей по инициативе диспетчера или по ошибке исполнения команды. После первого нажатия остановленный приказ переходит в состояние остановки на команде, после второго нажатия начинает выполняться команда, на которой произошла остановка.
«Отмена» – отмена приказа, если в процессе исполнения приказа диспетчер принимает решение о ненужности оставшихся в приказе команд. При отмене обязательно будет выполнена текущая команда (или несколько), после чего приказ будет отменен.
Операции над командами в приказе
В п. 7.2.1 описаны наиболее частые операции над командами приказа, выполняемыми в результате ошибочного исполнения команды (неисполнения). Кроме этого, есть возможность управления командами, которые находятся в очереди на исполнение. Выбрать какую-либо операцию можно в контекстном меню пульта приказов (Рис. 25). Меню вызывается щелчком правой клавиши мыши на нужной команде в списке команд приказа.
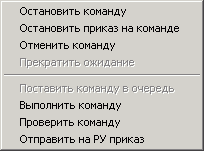
Рис. 25 Контекстное меню в пульте приказов
Возможные операции следующие:
«Остановить команду». При достижении такой команды приказ будет остановлен, но сохранится возможность управления другими еще не исполненными командами приказа.
«Остановить приказ на команде». При достижении такой команды приказ будет остановлен, но без возможности управления другими еще не исполненными командами приказа.
«Отменить команду». При достижении такой команды приказ она будет пропущена и управление будет передано следующий в списке команде.
«Прекратить ожидание». Поскольку комплекс программ АРМ может быть установлен на нескольких компьютерах, работающих друг с другом через локальную сеть, могут возникать проблемы связи программ из-за плохой пропускной способности, сильной загруженности сети или других причин. В этом случае время игнорирования исполнения команды (время T1, п. 4.2) может сильно превысить положенное время. Для перевода приказа в состояние остановки требуется выполнить вышеописанную функцию.
«Поставить команду в очередь». Такую операцию можно выполнить на уже остановленной команде. Если приказ был остановлен именно на этой команде, то она будет отправлена на исполнение. Если это команда из списка еще не исполненных команд, то она будет установлена в очередь и будет выполнена в соответствии с очередностью.
«Выполнить команду». Такая операция выполняется для внеочередного исполнения команды.
«Проверить команду». Проверка текущего положения объекта на настоящий момент.
«Отправить на РУ приказ». Передача команды на ручное или дистанционное исполнение.
Действия при возникновении ошибок в выполнении приказа
При правильном исполнении приказа окно пульта приказа автоматически скроется, в звуковых колонках будет проигран специальный сигнал окончания приказа, а в статусной панели в течение нескольких секунд будет показан текст, говорящий об успешном исполнении приказа.
В процессе исполнения приказа могут возникать ошибочные ситуации, при этом приказ будет остановлен, в звуковых колонках будет проигран специальный сигнал ошибки приказа, а в статусной строке пульта приказов будет указана причина возникновения ошибки (Рис. 26).
![]()
Рис. 26 Статус-строка пульта приказов
Основные виды ошибок при остановке приказа следующие:
«Объект не переключился». За время T1+T2 (п. 4.2) информация о переключении объекта не поступила. Ошибка может возникать, если в момент исполнения команды телесигнализация была недостоверна, или объект переключился позднее суммы времен T1+T2. В этом случае можно выполнить функцию «Проверить», при этом приказ перейдет к переключению следующего объекта. Если объект не переключился, можно повторно отправить команду кнопкой «Повтор», отправить его на ручное управление кнопкой «Через РУ» или пропустить эту команду кнопкой «Пропустить», если оставшиеся переключения в приказе можно выполнить без текущей команды. Если оставшиеся команды не имеют смысла без переключения текущего объекта (например, требуется расширение зоны работ), то данный приказ можно отменить кнопкой «Отмена», после чего сформировать другой приказ.
«Не работает сеть», «Обрыв связи с драйвером», «Драйвер не отвечает на посылки». Такие ошибки могут возникать по следующим причинам:
при отсутствии в памяти компьютера программы логического драйвера, который осуществляет связь с аппаратурой телемеханики. В процессе работы это может произойти только при искусственной выгрузке драйвера из памяти диспетчером. При работе в режиме имитатора ТУ-ТС такая ошибка возникнуть не может. При этой ошибке необходимо запустить логический драйвер способом, аналогичным описанному в п. 1.
при плохой работоспособности сети и, как следствие, ошибках связи программы АРМ с драйверами. В этом случае можно перезагрузить компьютер или обратиться к лицу, сопровождающему АРМ.
«В БД неправильные данные для формирования ТУ». Ошибка моет появиться из-за неверно указанных кодах телеуправления текущего объекта или контролируемого пункта, которому он принадлежит. В этом случае на такой объект можно сформировать только ручной приказ. Для исправления ошибки в кодах необходимо сообщить об это телемеханикам или записать в журнал замечаний по АРМ (п. 15.2).
«Сетевой объект (не телеуправляемый)». Ошибка моет появиться из-за неверно указанных свойствах объекта в базе данных – телеуправляемый и сетевой одновременно. Поскольку у сетевого объекта данные о положении объекта принимаются из сети от АРМ другого энергодиспетчера, посылка команды ТУ на него запрещена. На такой объект позволяется формирование приказа ручного управления в вводом фамилии энергодиспетчера соседнего участка в качестве исполнителя приказа. В случае появления следует обратиться к телемеханикам для исправления БД.
«Не работает контроллер». Ошибка возникает при неисправности адаптера связи с телемеханикой или при выключении ему питания. В этом случае следует обратиться к телемеханику.
«Переполнен буфер контроллера». Адаптер телемеханики не может принять в очередь на отправку текущую команду. Ошибка может возникнуть в двух случаях:
в адаптер отправлено больше десятка команд на одновременное выполнение. В этом случае следует немного подождать, пока очередь рассосется, и выполнить повторную отправку команды в адаптер.
Ошибка может свидетельствовать о неисправности одного из блоков ТУ аппаратуры телемеханики МСТ-95, поскольку при отсутствии серии ТУ адаптер не может выполнять собственные команды телеуправления. В этом случае следует обратиться к телемеханику.