

Функции операционных систем
Основные функции:
Выполнение по запросу программ тех достаточно элементарных (низкоуровневых) действий, которые являются общими для большинства программ и часто встречаются почти во всех программах (ввод и вывод данных, запуск и остановка других программ, выделение и освобождение дополнительной памяти и др.).
Загрузка программ в оперативную память и их выполнение.
Стандартизованный доступ к периферийным устройствам (устройства ввода-вывода).
Управление оперативной памятью (распределение между процессами, организация виртуальной памяти).
Управление доступом к данным на энергонезависимых носителях (таких как жёсткий диск, оптические диски и др.), организованным в той или иной файловой системе.
Обеспечение пользовательского интерфейса.
Сетевые операции, поддержка стека сетевых протоколов.
Дополнительные функции:
Параллельное или псевдопараллельное выполнение задач (многозадачность).
Эффективное распределение ресурсов вычислительной системы между процессами.
Разграничение доступа различных процессов к ресурсам.
Организация надёжных вычислений (невозможности одного вычислительного процесса намеренно или по ошибке повлиять на вычисления в другом процессе), основана на разграничении доступа к ресурсам.
Взаимодействие между процессами: обмен данными, взаимная синхронизация.
Защита самой системы, а также пользовательских данных и программ от действий пользователей (злонамеренных или по незнанию) или приложений.
Многопользовательский режим работы и разграничение прав доступа (см. аутентификация, авторизация).
33 Ос реального времени : жесткие и мягкие. Операционные системы реального времени для авионики.
Представлен обзор сравнительных характеристик ОС РВ, присутствующих на российском рынке, применительно к использованию в авиационных системах управления.
Благодаря развитию вычислительной техники в последнее время стало возможным возложить на один модуль задачи, выполняемые ранее несколькими процессорными модулями, при этом улучшив массогабаритные характеристики системы управления и снизив ее стоимость. Такая тенденция в авиационной технике привела к появлению концепции интегрированной модульной авионики — ИМА (Integrated Modular Avionics, IMA).
Проблема интеграции функций управления в единый модуль состоит в том, что необходимо разделять ставшие теперь общими ресурсы (процессорное время, память, каналы обмена) между различными задачами, при этом обеспечивая такой же уровень надежности и независимости функций, как и был ранее. Ключевую роль в решении данной проблемы играет операционная система реального времени.
Табл. 1. ОСРВ авиационного применения |
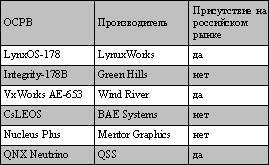
В настоящее время на мировом рынке присутствует несколько коммерческих ОСРВ для ответственных применений (табл. 1). В данной статье приведен обзор ОСРВ, доступных на российском рынке, на основе информации из открытых источников и личного опыта авторов.
Далее, если нет других оговорок, для краткости будут использоваться следующие названия ОС: LynxOS вместо LynxOS-178; VxWorks вместо VxWork 653; QNX вместо QNX Neutrino.