

Алгоритм вторичной обработки радиолокационной информации
Вторичная обработка первичной РЛИ предопределяет некогерентное пространственно-временное объединение результатов первичной обработки.
Вторичная обработка РЛИ призвана предупредить опасные сближения воздушных судов. Для этого необходимо для ранее наблюдавшихся ВС подтвердить существование их траектории (наличие координат ВС за несколько обзоров), а для вновь обнаруженных ВС «завязать» их траектории. Для этого производятся ряд операций:
- подтверждение наличия в памяти координат ранее обнаруженных целей;
- обнаружение новых целей и определение их координат;
- сглаживание координат;
- автосопровождение ВС;
- прогнозирование (экстраполяция) координат ВС;
- объединение информации от нескольких РЛС.
Существует несколько способов объединения результатов первичной обработки:
- когерентное сложение (накопление) сигналов за несколько циклов обзора;
- некогерентное сложение (накопление) сигналов за несколько циклов обзора;
-
процедура объединения единичных решений
по правилу «n из
 »,
(
-
число циклов обзора) состоящая в том,
что объединенное решение о наличии цели
принимается в том случае, если хотя бы
n единичных решений о
наличии цели из
объединяемых
являются положительными, в противном
случае выносится решение об отсутствии
цели.
»,
(
-
число циклов обзора) состоящая в том,
что объединенное решение о наличии цели
принимается в том случае, если хотя бы
n единичных решений о
наличии цели из
объединяемых
являются положительными, в противном
случае выносится решение об отсутствии
цели.
Первый способ объединения (когерентное накопление) практического интереса не представляет в силу сложности реализации когерентного накопления на больших интервалах времени, а так же по причине возможного отсутствия столь продолжительной когерентности объединяемых сигналов.
Второй способ объединения (когерентное накопление) много проще в технической реализации, приводит к улучшению характеристик обнаружения как при наличии межобзорной корреляции, так и при её отсутствии.
Одна отметка не позволяет с высокой достоверностью принимать решение о наличии объекта в зоне обнаружения. Кроме того, по ней нельзя определить направление движения объекта и параметры его траектории. Для выяснения этих вопросов необходимо располагать совокупностью отметок, полученных в разные моменты времени за несколько циклов обзора пространства.
Траектория
движения объекта описывается векторной
функцией, зависящей от ряда факторов:
 объекта, его маневренные возможности,
скорости и т.д. На траекторию влияют и
случайные факторы: изменение характеристик
среды, ошибки в процессе управления и
другие. Поэтому вторичная обработка
носит статистический характер (процесс
на входе устройства вторичной обработки
случайный). Качество обнаружения
траектории характеризуется следующими
показателями: вероятность обнаружения
истинной траектории D;
вероятность обнаружения ложной траектории
F; среднее время обнаружения
траектории
объекта, его маневренные возможности,
скорости и т.д. На траекторию влияют и
случайные факторы: изменение характеристик
среды, ошибки в процессе управления и
другие. Поэтому вторичная обработка
носит статистический характер (процесс
на входе устройства вторичной обработки
случайный). Качество обнаружения
траектории характеризуется следующими
показателями: вероятность обнаружения
истинной траектории D;
вероятность обнаружения ложной траектории
F; среднее время обнаружения
траектории
 ;
среднее время обнаружения ложной
траектории
;
среднее время обнаружения ложной
траектории
 ;
среднее число ложных траекторий в
единицу времени
;
среднее число ложных траекторий в
единицу времени
 .
.
Процесс вторичной обработки состоит в следующем.
Пусть
устройство первичной обработки приняло
решение о наличии объекта и измерило
его координаты: дальность R
и азимут β в некоторый
момент времени t. В
устройстве вторичной обработки
формируется отметка y(R,β,t),
которая принимается за начало траектории.
Так как РЛС предназначена для наблюдения
за объектами определенного класса, то
обычно известны максимальная
 и
минимальная
и
минимальная
 скорости их полета. Тогда, если
скорости их полета. Тогда, если
 -
период наблюдения (обзора) РЛС, то можно
выделить область
-
период наблюдения (обзора) РЛС, то можно
выделить область
 в виде кольца с центром, совпадающим с
первой отметкой радиусами
в виде кольца с центром, совпадающим с
первой отметкой радиусами
 .
.

Рис.10.13.Этапы формирования траекторий:
1. Стробирование.
2. Завязка.
3. Экстраполяция.
4. Подтверждение траектории.
5. Сопровождение.
В том кольце может находиться в следующем обзоре. Операция формирования такой области называется стробирование, а сама область – стробом. Если в следующем обзоре в строб попадает отметка, то происходит завязка траектории. При попадании в строб нескольких отметок происходит завязка нескольких траекторий. Если в начальном стробе не оказывается ни одной отметки, то первая считается ложной и стирается из памяти (обработка осуществляется с помощью ЭВМ), если критерии завязки трассы «2 из 2», либо остается в памяти, если критерии завязки «2 из m» m>2.
По
двум отметкам можно определить направление
и среднюю скорость движения объекта
 ,
где
,
где
 -
расстояние между 1 и 2 отметками. Зная
направление движения и среднюю скорость,
можно рассчитать предполагаемое
положение отметки в следующем обзоре,
т.е. провести экстраполяцию (предсказание).
На рисунке экстраполирование отметки
обозначены ∆. Вокруг этих отметок
образуются стробы, размеры которых
определяются погрешностями измерения
координат объектов и ошибками расчета
положения экстраполированных отметок.
При обнаружении траектории маневрирующего
объекта размеры стробов рассчитываются
с учетом маневра. Размеры стробов
непосредственно влияют на показатели
качества обнаружения траектории. Его
увеличение приводит к увеличению отметок
в стробе, в результате чего вероятность
F возрастает. Уменьшение
строба может привести к непопаданию
истинной отметки в строб, при этом
снижается вероятность D.
-
расстояние между 1 и 2 отметками. Зная
направление движения и среднюю скорость,
можно рассчитать предполагаемое
положение отметки в следующем обзоре,
т.е. провести экстраполяцию (предсказание).
На рисунке экстраполирование отметки
обозначены ∆. Вокруг этих отметок
образуются стробы, размеры которых
определяются погрешностями измерения
координат объектов и ошибками расчета
положения экстраполированных отметок.
При обнаружении траектории маневрирующего
объекта размеры стробов рассчитываются
с учетом маневра. Размеры стробов
непосредственно влияют на показатели
качества обнаружения траектории. Его
увеличение приводит к увеличению отметок
в стробе, в результате чего вероятность
F возрастает. Уменьшение
строба может привести к непопаданию
истинной отметки в строб, при этом
снижается вероятность D.
Если
в строб
 попала
отметка, то она считается принадлежащей
обнаруживаемой траектории. Процесс
обнаружения продолжается, и, когда в
соответствии с принятым критерием будет
вынесено решение о подтверждении
траектории, т.е. об окончательном
обнаружении, она передается на
сопровождение.
попала
отметка, то она считается принадлежащей
обнаруживаемой траектории. Процесс
обнаружения продолжается, и, когда в
соответствии с принятым критерием будет
вынесено решение о подтверждении
траектории, т.е. об окончательном
обнаружении, она передается на
сопровождение.
Если
в строб
не попадает ни одной отметки, то траектория
продолжается отметка, при этом размеры
строба увеличиваются. При невыполнении
критерия подтверждения траектория
сбрасывается. При попадании в стробы
, ,
, ,…нескольких
отметок можно либо продолжать траекторию
по каждой из них, при этом ложные
траектории через несколько обзоров
из-за отсутствия подтверждения будут
отброшены, либо выбрать в стробе одну
отметку, наиболее близкую к обнаруживаемой
траектории, а остальные отбросить как
ложные.
,…нескольких
отметок можно либо продолжать траекторию
по каждой из них, при этом ложные
траектории через несколько обзоров
из-за отсутствия подтверждения будут
отброшены, либо выбрать в стробе одну
отметку, наиболее близкую к обнаруживаемой
траектории, а остальные отбросить как
ложные.
Два вида критериев обнаружения трасс.
Критерий «
 »
»
 траектория считается обнаруженной и
передается на сопровождение, если в
течение m смежных периодов
обзоров появится не менее k
отметок; в противном случае, а так же
при отсутствии отметок в l
смежных обзорах подряд принимается
решение о сбросе траектории. Два порога:
верхний k и нижний l.
траектория считается обнаруженной и
передается на сопровождение, если в
течение m смежных периодов
обзоров появится не менее k
отметок; в противном случае, а так же
при отсутствии отметок в l
смежных обзорах подряд принимается
решение о сбросе траектории. Два порога:
верхний k и нижний l.Критерий «
 »:
принимается решение об обнаружении
траектории при появлении k
отметок в m смежных
обзорах.
»:
принимается решение об обнаружении
траектории при появлении k
отметок в m смежных
обзорах.
Принцип экстраполяции координат по параметрам траектории в общем виде можно пояснить следующим образом. Пусть в момент времени tn (последний обзор) получены координаты xn, yn отметки от воздушного объекта. Кроме того, рассчитаны параметры траектории в этой точке (скорость Vn, курс Qn) и их первые приращения ΔVn и ΔQn. Задача состоит в том, чтобы определить экстраполированное на n+1 обзор значение координат xn+1, yn+1.
Расстояние , которое объект пролетит за время T0, равно
 .
(10.6)
.
(10.6)
Курс цели изменится за это время на величину ΔQn. Откладывая от точки с координатами xn, yn отрезок под углом Qn+ΔQn, получим координаты экстраполированной отметки xэ = xn+1, уэ = yn+1. Координаты экстраполированной отметки вычисляются по формулам:
xn+1 = xэ = xn + ·sin (Qn+ΔQn);
уn+1 = уэ = уn + ·cos (Qn+ΔQn). (10.7)
Экстраполированное значение курса в точке xn+1, уn+1 равно
Qn+1 = Qэ = Qn + ΔQn, (10.8)
а экстраполированное значение скорости
Vn+1 = Vэ = Vn + ΔVn, (10.9)
Для получения информации о скорости и курсе полета воздушного объекта необходимо иметь по крайне мере две отметки, а для вычитания их приращений – не менее трех. Ошибки вычисления координат отметки в упрежденной точке будут определяться ошибками, с которыми определены в этой точке параметры траектории и их приращения, а также ошибками измерения координат в точке n. Для увеличения точности экстраполяции применяется сглаживание параметров.
Сглаживание параметров траектории проводится с целью более точного прогнозирования координат, а значит и области возможного обнаружения воздушных объектов в очередном обзоре. Операция сглаживания необходима, так как вычисление прогнозируемых координат сопровождается погрешностями, соизмеримыми с расстояниями, проходимыми воздушными объектами за период обзора. Операция сглаживания координат и скорости проводится на каждом обзоре РЛС. При этом предполагается, что ошибки, обусловленные внешними помехами, флюктуациями интенсивности отраженных сигналов, пропусками обнаруженных объектов, маневром воздушного судна независимы и распределены по нормальному закону. Кроме того, в алгоритмы сглаживания закладывается гипотеза о постоянстве скорости движения воздушного объекта или совершении маневра с постоянным радиусом. Наиболее часто применяют алгоритм скользящего (последовательного) сглаживания, который основан на том, что новые координаты воздушного объекта определяются по старым таким образом, что все ранее проведенные измерения уменьшаются со временем, т.е. большее влияние оказывают новые, ближние по времени данные.
Сглаженное значение скорости представляет собой линейную комбинацию предыдущего сглаженного значения скорости и текущего отклонения (рассогласования) полученного значения координаты от рассчитанного по предыдущим данным экстраполированного значения координаты.
U*n = U*n-1 + n (yn – y*nэ ), (10.10)
где U*n – сглаживание значения скорости в момент n-го наблюдения;
U*n-1 – сглаживание значения скорости предыдущего обзора;
y*nэ – экстраполированное значение координаты;
yn – текущее значение координаты;
 – коэффициент
сглаживания скорости.
– коэффициент
сглаживания скорости.
Сглаженное значение координаты представляет собой линейную комбинацию ее экстраполированного значения и взвешенного с коэффициентом n рассогласования между экстраполированным и текущим ее значением.
у*n = у*nэ+n (yn – y*nэ ), (10.11)
где
 –
коэффициент сглаживания координаты.
–
коэффициент сглаживания координаты.
На рис. 3.5 изображена зависимость коэффициентов n и n от числа наблюдений n.
Из графиков видно, что с увеличением числа наблюдений n коэффициенты сглаживания координаты и скорости асимптотически приближаются к нулю. В реальных условиях коэффициенты сглаживания n и n ограничены снизу и для установившегося режима автосопровождения должны быть выбраны постоянными.
При сопровождении не маневрирующих объектов, коэффициенты n и n должны быть взяты малыми. При этом хорошо фильтруются случайные ошибки, а динамические ошибки, обусловленные маневром цели, будут выделяться почти не сглаженными. С увеличением n и n ухудшается сглаживание случайных ошибок, однако, улучшается сглаживание динамических ошибок. Следовательно, при сопровождении маневрирующего объекта необходимо увеличить коэффициенты сглаживания n и n.
Одной из основных операций при автоматическом автосопровождении по данным обзорной РЛС является отбор отметок для продолжения каждой из сопровождаемых траекторий. Такая операция называется селекцией траекторий и производится на основе сравнения координат и параметров новых отметок с экстраполированными координатами и характеристиками сопровождаемых траекторий. Для упрощения процесса селекции траекторий и сокращения объема вычислений сравнение координат наблюдаемых и экстраполированных отметок производится в стробах.
Стробирование отметок может быть физическим и математическим.
Спорные ситуации возникают в том случае, если в строб попадает не одна, а несколько целей, которые могут быть как истинными, так и ложными. За истинную отметку можно принять ту i-ю цель с координатами хi , уi, которая по расстоянию ΔRi ближе к центру строба с характеристиками хст , уст. Для суждения об этом для всех i = 1, ..., m целей решается зависимость
 .
(10.12)
.
(10.12)
Из нескольких ΔRi выбирается минимальное значение. При наличии в стробе двух целей, истинную выбирают по знаку решающей функции
 .
.
Если K > 0, то i-я цель истинная, если K < 0, то цель ложная.
Возможны ситуации, когда Rj, Rj+1 близки по своим значениям и меньше возможных погрешностей измерения. При этом принимать решение по критерию знака функции K нельзя. В этом случае предварительно проводится проверка на состоятельность применения этого критерия путем сравнения его с порогом K0. При |K| ≥ K0 предыдущий критерий можно использовать, в противном случае принимается решение о переносе анализа в следующий цикл работы системы, для чего координаты прогнозируются по старым данным.
При движении воздушных судов по близким и пересекающимся траекториям ситуация становится сложной. В существующих системах для того, чтобы не спутать траектории и отметки от различных самолетов, используют два способа.
Первый способ. С помощью радиопеленгатора диспетчер устанавливает связь с каждым воздушным судном. Ответный сигнал экипажа пеленгуется, пеленг высвечивается на экране диспетчера. Если произошло перепутывание траекторий, диспетчер вносит поправку.
Второй способ. По этому способу отождествляются отметки по бортовому номеру, получаемому в ответном сигнале при использовании вторичных радиолокаторов.
Объединение во времени единичных оценок координат.
В результате первичной обработки принятого сигнала формируется отношение правдоподобия. Фактически происходит сопоставление принятого сигнала и его прообраза по всем характеристикам: закон модуляции, положение во времени, положение по частоте, амплитудно-фазовая структура. Если эти характеристики принятого сигнала и прообраза согласованы, то отношение правдоподобия максимально. По максимуму отношения правдоподобия судят о дальности до цели, о радиальной скорости, об угловом положении цели. В зависимости от способа выбора измеряемого параметра возможна следующая классификация измерителей:
по степени участия человека (эргатические – с участием человека и автоматические – без участия человека);
по используемому времени (оценивание при одном обращении к цели или по результатам нескольких обращений);
по наличию или отсутствию обратной связи (следящие или замкнутые и неследящие или разомкнутые).
Эргатическими измерителями являются системы «индикатор–оператор». Человек–оператор, наблюдая за экраном индикатора и используя калибрационные метки, осуществляет максимально правдоподобную оценку координат или параметров движения объектов. При этом оценивание возможно по результатам одного обращения к цели, либо нескольких.
Неследящий режим измерения характерен для системы «индикатор–оператор» с неподвижными калибрационными метками. Следящий режим измерения характерен для системы «индикатор–оператор» с подвижными метками. В следящих измерителях присутствует такое техническое устройство, как дискриминатор, на выходе которого формируется сигнал ошибки, пропорциональный рассогласованию между истинным значением измеряемой величины и ее измеренным значением. Структура следящего радиолокационного измерителя изображена на рис.10.14.
Автоматические измерители работают без участия человека. Они могут формировать как разовую оценку измеряемого параметра, так и объединенную за несколько обзоров. Варианты измерителей могут быть следящими (замкнутыми) или неследящими (разомкнутыми).

Обработка сигналов в многоканальных РЛС.
Многоканальные системы и многоканальная обработка позволяют существенно повысить возможности РЛС. Основной задачей таких систем является анализ и оценка радиолокационной обстановки. К многоканальным относят РЛС, в которых обработка сигналов производится одновременно в нескольких каналах, каждый из которых предназначен для обработки сигналов, приходящих от цели, расположенной в одном элементе разрешения по дальности, скорости, ускорению, угловым координатам. Информация о дальности, скорости, ускорении и угловых координатах каждой цели в многоканальных РЛС выделяется в результате совместной обработки сигналов, принятых по всем каналам. Среди многоканальных РЛС различают многоканальные РЛС по дальности, скорости, ускорению, пространственно-многоканальные, частотно-многоканальные. В многоканальных по дальности РЛС сигналы поступают от различных элементов дальности последовательно во времени, при этом отпадает необходимость в обзоре по дальности. Каждому элементу разрешения по дальности соответствует свой канал.
В многоканальных по скорости РЛС устанавливается набор фильтров, перекрывающих возможный диапазон изменений частоты Доплера.
Пространственно-многоканальные РЛС имеют несколько точек приема и излучения сигналов, разнесенных определенным образом в пространстве. В таких РЛС для обеспечения требуемой скорости изменения положения луча применяются ФАР.
В частотно-многоканальных РЛС имеются несколько каналов излучения и приема, настроенных на различные частоты и использующих одинаковые или различные законы модуляции. Все каналы работают параллельно и формируют луч, в пределах которого излучаются колебания различных частот. К многоканальным по частоте РЛС относятся и РЛС, в которых формируются несколько лучей, в каждом из которых излучаются колебания только на своей частоте.
В многоканальных РЛС сигналы в каждом из приемных каналов отличаются один от другого в зависимости от пространственного положения каждого из каналов. Поэтому принимаемый сигнал является пространственно-временной функцией и при выполнении корреляционной или фильтровой обработки для максимизации отношения сигнал–шум, требуется кроме временных параметров учитывать пространственные координаты цели, заложенные в принимаемом сигнале.
Физический смысл пространственно-временной обработки в многоканальной РЛС на фоне собственных шумов состоит в том, что в направлении на цель формируется максимум суммарной ДНА всех приемных каналов. В результате энергия принимаемого сигнала будет максимальной, а, следовательно, и максимальным будет отношение сигнал–шум.
Пространственно-временная обработка принимаемых сигналов состоит в формировании в каждом приемном канале корреляционного интеграла
 ,
(10.13)
,
(10.13)
где хi(t) – сигнал на выходе i-го приемного канала;
soi( ) – опорный сигнал, подаваемый на коррелятор i-го приемного канала;
, – углы, характеризующие направления прихода волны в азимутальной и угломестной плоскостях;
, – угловая расстройка опорного сигнала по отношению к направлению прихода отраженного сигнала.
Дальнейшая обработка предполагает суммирование выходных сигналов каждого из корреляторов. Опорные сигналы формируются с учетом информации о дальности, скорости, взаимного расположения антенн и целей относительно них. Аналогичным образом строится многоканальный пространственно-временной согласованный фильтр (СФ), выходной сигнал которого
 ,
(10.14)
,
(10.14)
где
 – импульсная характеристика СФ в i-ом
приемном канале.
– импульсная характеристика СФ в i-ом
приемном канале.
В пространственно-многоканальных РЛС наиболее простой является раздельная обработка принимаемых сигналов, выполняемая в два этапа. На первом этапе сигнал подвергается обработке с помощью пространственно-временного СФ или пространственного коррелятора, а на втором – временной обработке. В результате пространственной обработки происходит переход от многих пространственных каналов к одному. На втором этапе реализуется последующая временная обработка. На рис.10.15 изображена схема многоканальной РЛС с корреляционной обработкой сигналов.

Пространственная обработка сводится к весовому суммированию сигналов, принимаемых в каждом из каналов РЛС. Компоненты сигналов с большим отношением сигнал–шум усиливаются в большей степени, чем с меньшим. Такое весовое суммирование позволяет увеличить отношение сигнал–шум на выходе пространственного коррелятора, что соответствует образованию суммарной ДН приемной антенны в направлении на цель.
Перемножители в приведенной схеме могут быть заменены регулируемыми усилителями, коэффициенты передачи которых равны f1(), f2(), …, fN(). Временная обработка выполняется с помощью коррелятора или СФ так же, как и в одноканальных РЛС.
Пространственная обработка может быть реализована с помощью пространственной согласованной фильтрацией. В этом случае пространственный СФ представляет собой набор фазовращателей – по одному в каждом канале, с помощью которых осуществляется фазирование напряжений сигналов в каналах. Далее напряжения с выходов фазовращателей суммируются. Структурная схема такой РЛС изображена на рис.10.16.

Согласованный фильтр может быть выполнен и по другой схеме, если в каждый приемный канал включить регулируемые усилители с коэффициентами передачи fi().
Если параметры принимаемого сигнала и помех известны точно, то необходимо проводить их оценку, и на основе оценок параметров формировать опорный сигнал пространственно-временного коррелятора и импульсную характеристику оптимального пространственно-временного фильтра. Поскольку параметры принимаемого сигнала и помех случайным образом меняются во времени, системы их оценки должны строиться как следящие измерители.
Многоканальные системы обработки сложнее, чем одноканальные, однако позволяют решать целый комплекс задач, невыполнимых для одноканальных РЛС.
Пространственная (третичная) обработка информации.
Третичная (мультирадарная) обработка – это процесс обработки сигналов или объединения первичной РЛИ по пространству с целью улучшения характеристик радиолокационного наблюдения.
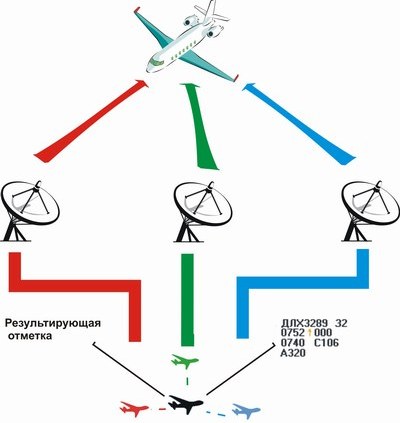
Если сигналы или первичную РЛИ, полученные в отдельных пунктах наблюдения, передать и сосредоточить в некотором центре обработки, то это позволит использовать дополнительную энергетику, корреляционные связи и пространственное подобие первичной РЛИ об одной цели от разных источников.
Энергетика принятого сигнала, которую можно использовать, пропорциональна суммарному раскрыву разреженной антенны.
Корреляционные
связи принятых в разных точках пространства
сигналов определяются расстоянием
между этими точками и интервалом
пространственной корреляции рассеянного
или излученного целью сигнала. Последний
определяется длиной волны ,
раскрывом антенны излучающей системы
Lа и расстоянием от
цели до зоны анализа Rц:
 .
Если расстояние между пунктами приема
l
меньше интервала пространственной
корреляции сигнала l,
то принятые в этих пунктах приема сигналы
являются коррелированными и их коэффициент
корреляции можно считать равным
.
Если расстояние между пунктами приема
l
меньше интервала пространственной
корреляции сигнала l,
то принятые в этих пунктах приема сигналы
являются коррелированными и их коэффициент
корреляции можно считать равным
 .
(10.15)
.
(10.15)
В противном случае сигналы некоррелированы.
Пространственное подобие первичной РЛИ об одной цели от разных источников, обусловленное фактическим наличием цели в определенной точке пространства, может быть использовано для отождествления РЛИ.
Техническим средством третичной обработки является многопозиционная радиолокационная система (МП РЛС), которая включает несколько разнесенных в пространстве приемных, передающих или приемопередающих позиций и в которой производится совместная обработка сигналов, поступающих от этих позиций. Центр совместной обработки соединяется линиями связи со всеми позициями.
Можно назвать три способа пространственного объединения сигналов и первичной РЛИ:
пространственно-когерентное объединение сигналов с привязкой позиций по времени, частоте и фазе принятых колебаний;
частичное (неполное) пространственно-когерентное объединение сигналов с привязкой позиций по времени и частоте;
пространственно-некогерентное объединение сигналов и первичной РЛИ с привязкой позиций только по времени.
В пространственно-когерентных МП РЛС взаимные фазовые сдвиги сигналов в трактах разнесенных позиций и линиях связи известны и сохраняются практически неизменными на интервале времени, намного превышающем время наблюдения сигнала. В таких РЛС необходима взаимная привязка не только по времени и частоте, но и по начальным фазам колебаний. Это можно обеспечить с помощью опорного сигнала, позволяющего измерять фазовые сдвиги и осуществлять коррекцию или учет при обработке.
В пространственно-когерентных МП РЛС с частичной пространственной когерентностью, которая сохраняется на интервале времени порядка времени наблюдения, информация о начальных фазах сигналов не используется. Привязка позиций осуществляется только по времени и частоте.
В пространственно-некогерентных МП РЛС фазовая информация полностью исключается в результате детектирования сигналов до их объединения. Объединение сигналов может осуществляться на следующих уровнях:
объединение видеосигналов после детектирования в каждой позиции;
объединение обнаруженных отметок и единичных замеров; при этом вся первичная обработка проводится на каждой позиции, а на совместную обработку поступает только полезная информация;
объединение траекторий, при этом первичная и вторичная обработка проводится на каждой позиции. Параметры траектории передаются в центр обработки, в результате которой отсеиваются «ложные» траектории.
Принято различать следующие группы МП РЛС:
пространственно-некогерентные МП РЛС;
активные пространственно-когерентные МП РЛС с кратковременной пространственной когерентностью;
пассивные пространственно-когерентные МП РЛС, в которых используется излученный целью сигнал;
пространственно-когерентные МП РЛС с продолжительной пространственной когерентностью.
Пространственно-разнесенные МП РЛС обладают следующими свойствами:
Высокие энергетические характеристики из-за использования энергии каждой передающей позиции всеми приемными.
Высокоточное измерение пространственного положения целей с использованием слабонаправленных антенн.
Возможность измерения не только трех координат, но и векторов скорости и ускорения.
Увеличение объема сигнальной информации для решения задач распознавания классов обнаруженных целей.
Повышение помехозащищенности от активных и пассивных помех.
Повышение живучести.
К недостаткам следует отнести следующее:
Необходимость совместного управления позициями.
Необходимость передачи данных по линиям связи.
Дополнительные требования по взаимной привязке.
Повышение требований к устройствам обработки.
Необходимость геодезической или навигационной привязки.
Таким образом, применение МП РЛС целесообразно при высоких требованиях к информативности, помехоустойчивости, живучести.