

§ 20. Опорные устройства балочных систем
Очень часто в машинах и конструкциях встречаются тела удлиненной формы, называемые балками (или балочными системами). Балки в основном предназначены для восприятия поперечных нагрузок. Балочные системы имеют специальные опорные устройства для сопряжения их с другими элементами и передачи на них усилий. Отметим следующие типы опор.
Шарнирно – подвижная опора (рис. 22, а). Такая опора допускает поворот вокруг оси шарнира и линейное перемещение параллельно опорной плоскости. В этой опоре известные точка приложения опорной реакции – центр шарнира и ее направление – нормаль к опорной поверхности (трением катков пренебрегают).
Таким образом, здесь остается одна неизвестная – опорная реакция А. Схематические изображения шарнирно – подвижных опор приведены на рис. 22, б. Следует отметить, что опорная поверхность шарнирно – подвижной опоры может быть непараллельна оси балки (рис. 22, в). Реакция А в этом случае не будет перпендикулярна оси балки, так как она перпендикулярна опорной поверхности.
Шарнирно – неподвижная опора (рис.
22, г). Эта опора допускает поворот
вокруг оси шарнира, но не допускает
никаких линейных перемещений. В данном
случае известна только точка приложения
опорной реакции – центр шарнира;
направление и величина опорной реакции
неизвестны. Обычно вместо определения
величины и направления реакции (полной)
находят ее горизонтальную и вертикальную
составляющие
![]() А
и
А
и
![]() А
. Схематические изображения шарнирно
– неподвижных опор приведены на рис.
22, д.
А
. Схематические изображения шарнирно
– неподвижных опор приведены на рис.
22, д.
Жесткая заделка (защемление) (рис. 22, е). Такая опора не допускает ни линейных перемещений, ни поворота. Неизвестными в данном случае являются не только величина и направление реакции, но и точка ее приложения. Таким образом, для определения опорной реакции следует найти три неизвестных: составляющие А и А опорной реакции по осям координат и реактивный момент mA относительно центра тяжести опорного сечения.
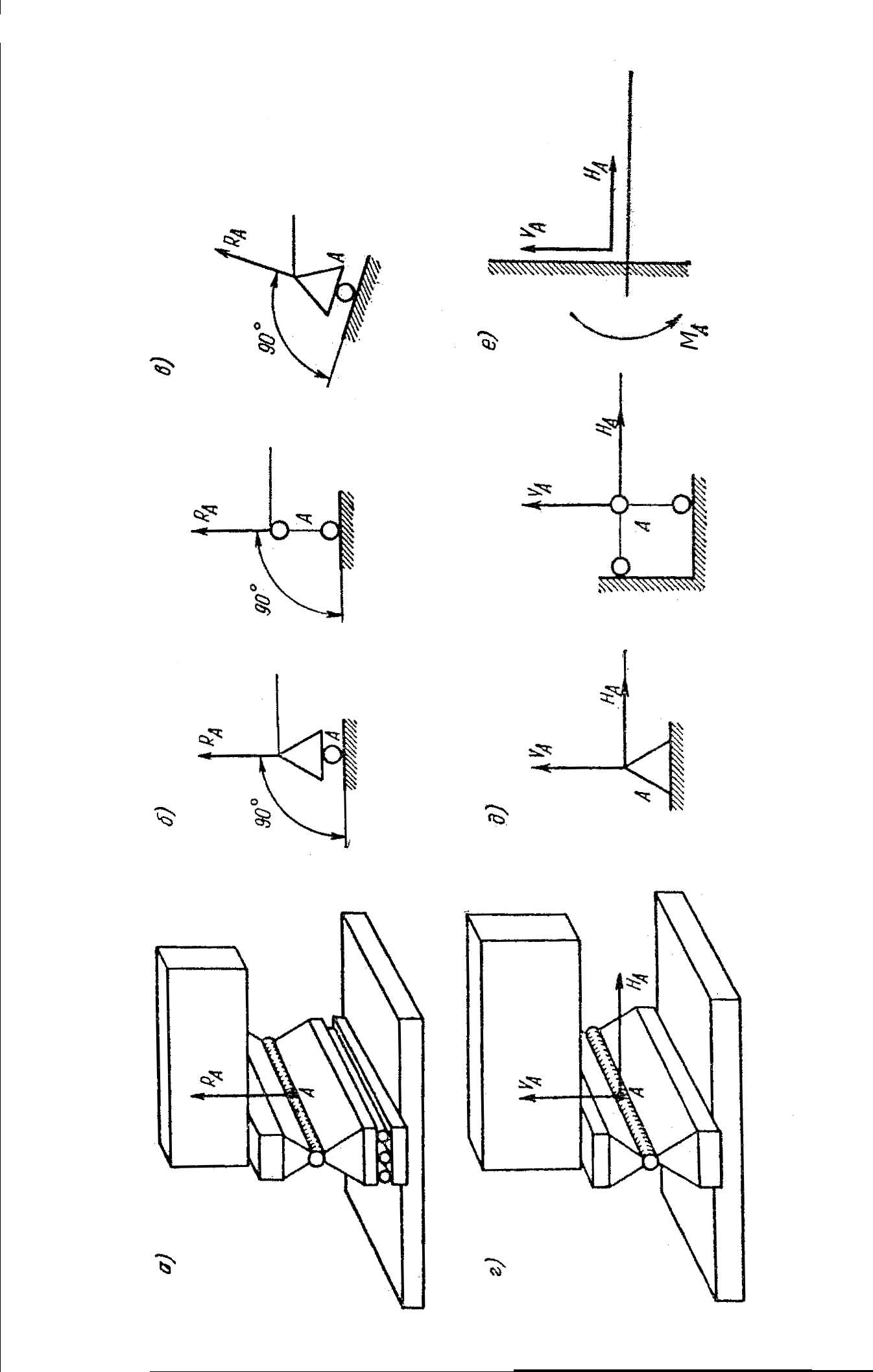
Рис. 22
Опорные реакции можно также обозначать
буквами, соответствующими координатным
осям, вдоль которых они направлены, с
индексом, отвечающим опоре. Например,
![]() А
и
А
и
![]() А
и т.п.
А
и т.п.
§ 21. Решение задач на равновесие плоской системы сил
Для решения задач на равновесие плоской системы сил можно пользоваться любой формой уравнений равновесия, приведенной в § 19. Составляя уравнения равновесия, следует учитывать, что мы имеем полную свободу выбора координатных осей и центров моментов. Эту свободу выбора нужно разумно использовать для упрощения вычислений, связанных с решением уравнений равновесия.
Целесообразно составлять уравнения так, чтобы они могли быть решены наиболее просто и быстро. Просто решается система уравнений равновесия, каждое из которых содержит одну из неизвестных. К такой системе можно прийти соответствующим выбором направления координатных осей и центра моментов.
В качестве центра моментов рекомендуется выбирать точку, где пересекаются две неизвестные силы; уравнение моментов относительной этой точки будет содержать только одну неизвестную. Направление координатных осей х и у следует выбирать так, чтобы оси были перпендикулярны некоторым неизвестным силам. При составлении уравнений проекций неизвестные, перпендикулярные соответствующей оси, в эти уравнения не войдут.
Определение неизвестных величин лучше начинать с уравнений моментов, а затем переходить к уравнениям проекций. При этом можно избежать совместного решения уравнений и, следовательно, уменьшить вероятность ошибок.
Следует отметить еще один важный момент. Для плоской системы сил можно выбрать любое число осей проекций и любое число центров моментов. Проектируя силы данной плоской системы на различные оси и составляя уравнения моментов относительно любых точек, можно написать сколько угодно уравнений равновесия, но только три из них будут независимыми. Остальные уравнения являются следствием этих трех уравнений и могут служить лишь для проверки решения.