

2.2. Вибір ед при змінному статичному навантаженні
У разі вибору ЕД для приводів, працюючих в умовах змінного моменту по величині і часу (наприклад, електромеханічного аретира і пристрою переміщення діафрагми і ін.) його потужність доцільно визначати, користуючись методом еквівалентного моменту Ме:
 , (3)
, (3)
де Мі – діючий момент;
ti - час дії цього моменту.
Тоді потужність двигуна визначитися
![]() .
(4)
.
(4)
2.3. Вибір ед при постійно діючому статичному навантаженні і забезпеченні заданого часу перехідного процесу
Потужність ЕД для цього випадку вибирають за рекомендаціями [11].
Проте, враховуючи те, що значна частина потужності при розгоні витрачається на подолання моменту інерції навантаження, елементів редуктора і самого двигуна, необхідно додатково перевірити умови забезпечення пускового моменту:
![]() , (5)
, (5)
де Jn - приведений момент інерції
![]() -
прискорення навантаження.
-
прискорення навантаження.
Приведений момент інерції визначитися з виразу
![]() .
(6)
.
(6)
де Ij – момент інерції j-1 ступеня редуктора
і – передавальне відношення пари коліс редуктора.
2.4. Сумісний вибір виконавчого двигуна і редуктора в слідкуючому приводі.
В слідкуючому приводі механізм працює весь час в динамічному режимі, тому рівняння моментів (3) повинне враховувати і номінальний режим роботи.
Рівняння моментів на осі двигуна буде мати вигляд
![]() .
(7)
.
(7)
Максимальне прискорення валу двигуна визначитися за виразом
![]() .
(8 )
.
(8 )
Поведемо
заміну (8) в рівнянні (7), отримаємо ![]()
![]() .
(9 )
.
(9 )
З виразу (9 ) видно, що момент на валу двигуна є деяка функція від передавального відношення редуктора ир. Знайдемо те оптимальне значення ир, при якому момент на валу двигуна буде мати мінімальну величину, для цього візьмемо першозмінну рівняння (9):
![]() . (10)
. (10)
Звідки для визначення up отримаємо вираз
![]() .
(11)
.
(11)
У виразі (9) на цьому етапі проектування Jдв і Jpпр невідомі.
Вважаючи,
що
![]() забезпечується
при номінальній кутовій швидкості
електродвигуна
ном,
запишемо вимогу до вибираного
електродвигуна,
виходячи з умови забезпечення режиму
перекидання uпереб:
забезпечується
при номінальній кутовій швидкості
електродвигуна
ном,
запишемо вимогу до вибираного
електродвигуна,
виходячи з умови забезпечення режиму
перекидання uпереб:
![]() .
(12
)
.
(12
)
Підставивши у вираз (11) ипереб з виразу (12 ), знайдемо:
![]() .
(13
)
.
(13
)
Підставивши значення иот з виразу (11 2.8) і (Jдв + JРпр) з виразу (13 ) у вираз (9), отримаємо рівняння для мінімального необхідного моменту електродвигуна:
![]() . (14
)
. (14
)
Потрібна мінімальна потужність двигуна буде дорівнювати
![]() .
(15 )
.
(15 )
Для вибору двигуна застосовують наступний алгоритм:
1. Визначають потужність двигуна за виразом (15 );
2. Підбирають двигун так, щоб він задовольняв вимогам рівнянь (10 ) і (11).
3. Призначають модуль зубчатих коліс і проводять розрахунки зубців тихохідної пари на міцність;
4. Обчислюють величину Jp.np.
5. У разі потреби проводимо уточнений розрахунок.
6. Визначають оптимальне передавальне число редуктора за формулою (11) і (12 ), вибирають менше його значення.
3. Визначення передавального числа редуктора
Як наголошувалося, малопотужні ЕД мають високу швидкість обертання, а виконавчі (вихідні) вали багатьох виробів тихохідні, наприклад астрономічні прилади мають швидкість обертання - І оборот за добу. Структурна схема узгодження моментів виконавчого двигуна і навантаження приведена на рис.2. В ній на місці навантаження, редуктор забезпечує
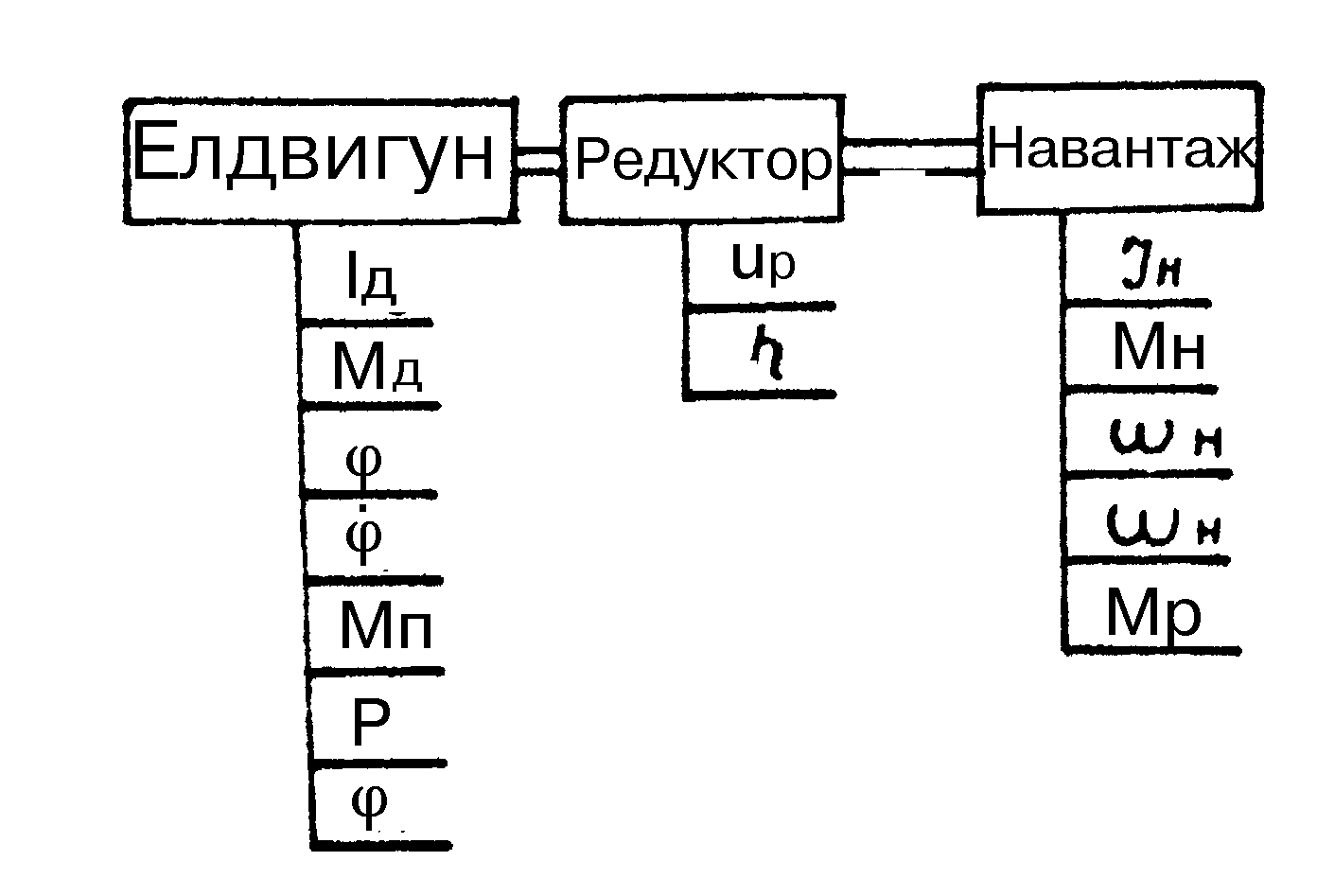
Рис.2. Схема узгодження параметрів виконавчого механізму
збільшення моменту на величину передавального числа, але цей момент зменшується на втрати в редукторі, тобто на ККД. Чим більше передавальне число редуктора, тим нижче за його ККД. Вибір оптимального передавального числа редуктора і мінімальної величини втрат моменту двигуна - одна з ключових задач при виборі кінематичної схеми редуктора.