

5.8. Стандартные настройки регулируемого электропривода
При последовательной коррекции структурная схема контура регулирования переменной хможет быть представлена, как показано на рис. 5.13, состоящей из регулятора с передаточной функциейWpxи объекта регулирования с передаточной функциейWо.р.xПередаточная функция разомкнутого контура
![]()
Примем, что передаточная функция объекта регулирования имеет вид

где τп - постоянное запаздывание; Тi - постоянные времени элементов объекта регулирования, расположенные в порядке убывания по значению.
Предположим, что передаточная функция регулятора реализована в виде
где l- число больших и средних постоянных времени. Тогда передаточная функция разомкнутого контура
Полученное выражение свидетельствует
о том, что формированием передаточной
функции регулятора можно направленно
видоизменять передаточную функцию
разомкнутого контура. Действительно,
при
![]() исходная
передаточная функция существенно
видоизменяется:
исходная
передаточная функция существенно
видоизменяется:

В ней введением регулятора с передаточной функцией (5.26) и подбором его параметров исключено l инерционных звеньев, обладающих большими и средними Ti сокращенопчастных коэффициентов и введено интегрирующее звено.
Исключение из передаточной функции разомкнутого контура звеньев с большими и средними постоянными времени открывает возможности повышения быстродействия контура perулирования. Эта операция реальные физические инерционные звенья из контура, разумеется, не исключает. Однако их. действие, замедляющее протекание переходных процессов, компенсируется действием соответствующих форсирующих звеньев, содержащихся- в регуляторе, ускоряющих в требуемой степени реакцию системы.
Введение интегрирующего звена, которое в Wo,pxотсутствовало, обеспечивает повышение точности регулирования, так как контур приобретает астатизм первого порядка (v= 1). Положительным изменением является и исключение частных коэффициентовk1,k2, ...,knконтура регулирования, благодаря которому все показатели регулирования определяются обобщенным фактором — соотношением постоянных времени инерционных элементов контура.
Пытаться компенсировать весьма малые постоянные времени звеньев контура нецелесообразно, так как технические трудности компенсации быстро возрастают при уменьшении значений постоянных времени, а влияние на быстродействие привода соответственно убывает. Особые трудности представляет компенсация дискретности и малого запаздывания nряда быстродействующих преобразователей. Как следствие, в (5.28) остались некомпенсированными несколько (m- 1) малых постоянныхTi, и постояннаяn.
Достоинством (5.28) является возможность выбора требуемого значения постоянной To. Этот выбор и определяет настройку контура регулирования.
Если выбрать Тоиз условия То<Tl+1, гдеTl+1, как было принято, является наибольшей из оставшихся некомпенсированными постоянныхTiто можно представить частотные характеристики (5.28), как показано на рис. 5.15. Низко-
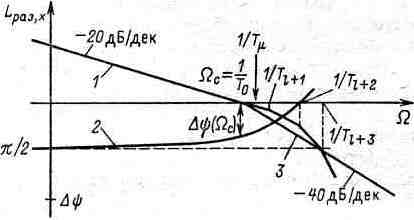
Рис. 5.15. Частотные характеристики контура регулирования при последовательной коррекции
и средне-частотная асимптота ЛАЧХ имеет наклон - 20 дБ/дек (прямая 1), а запас по фазе на частоте среза (c), определяемый по кривой 2, зависит от степени удаленности частоты среза 1/Tоот ближайшей частоты сопряжения 1/Tl+1. С учетом постоянной запаздыванияnвлияние которой в кривой 2 проявляется, запас по фазе на частоте Среза составит:
![]()
Углы i(c) в (5.29) невелики, так как на соответствующих частотах сопряженияarctgTic=arctg1 =/4. Так как То>Tt+1, arctgTic</4 и приближенно можно принять arctgTicTic
Следовательно,
![]()
где Т=n+
![]() —суммарная некомпенсированная
постоянная контура регулирования,
эквивалентная по потере запаса по фазе
на частоте среза всем его реальным
некомпенсированным инерционностям.
—суммарная некомпенсированная
постоянная контура регулирования,
эквивалентная по потере запаса по фазе
на частоте среза всем его реальным
некомпенсированным инерционностям.
С учетом (5.30) передаточную функцию (5.28) можно с достаточной точностью представить в виде
![]()
Соответствующая (5.31) ЛАЧХ контура регулирования в области низких и средних частот совпадает с прямой 1 (рис. 5.15), а в области высоких частот представляется асимптотой 3, имеющей наклон —40 дБ/дек. Частота сопряжения для этой асимптоты 1/Tрасположена ближе к частоте среза, чем и учитывается определяемое (5.29) влияние всех малых постоянных на динамические свойства контура регулирования.
Таким образом, доказано, что при выполнении определенных условий свойства контура регулирования с приемлемой для инженерной практики точностью при последовательной коррекции определяются передаточной функцией (5.31), имеющей второй порядок.
При этом передаточная функция замкнутого контура регулирования будет иметь вид
![]()
а корни характеристического уравнения равны:
![]()
где а = Tо/T— соотношение постоянных контура регулирования.
При а < 4 движение электропривода в переходном процессе при скачке задания и нулевых начальных условиях- определяется следующим уравнением:
Суммарная некомпенсируемая постоянная Tполностью определяет быстродействие электропривода по показателю общего времени переходного процессаtп,п. В соответствии с (5.32) свободные составляющие переходного процесса затухают в течение времени
![]()
Колебательность электропривода аналогично разомкнутой линеаризованной системе определяется соотношением постоянных контура а; этот же показатель определяет перерегулирование. Следовательно, подбором соотношения постоянных а можно обеспечить требуемые динамические показатели при быстродействии, ограниченном уровнем суммарной некомпенсированной постоянной времениT.
Изложенное составляет основу широко используемого в практике электропривода инженерного метода синтеза контуров регулирования координат электропривода. Задавшись требуемым соотношением постоянных а и определив по (5.30) T, можно записать желаемую передаточную функцию разомкнутого контура:
![]()
передаточная функция объекта регулирования имеет вид:

Передаточная функция регулятора в соответствии с (5.24) определяется так:

Рассматривая (5.36), можно убедиться, что передаточная функция регулятора по мере увеличения числа компенсируемых постоянных lусложняется. Приl= 0 (всеTi, малы) она принимает вид
![]()
![]()
где
В этом случае регулятор представляет собой интегратор с постоянной интегрирования Tи(И-регулятор). Приl=1
![]()
т. е. требуется пропорционально-интегральный регулятор (ПИ-регулятор). При l=2 необходим пропорциональный интегро-дифференциальный регулятор (ПИД-регулятор) и с дальнейшим увеличением l в его передаточной функции требуется двухкратное и большей кратности дифференцирование входного сигнала.
Исходя из требования необходимой помехозащищенности контура, допускают лишь однократное дифференцирование сигнала, т. е. компенсируют не больше двух больших и средних постоянных времени. Если в контуре регулирования координаты химеется больше двух подлежащих компенсации больших и средних постоянныхTiприбегают к введению подчиненных контуров регулирования.
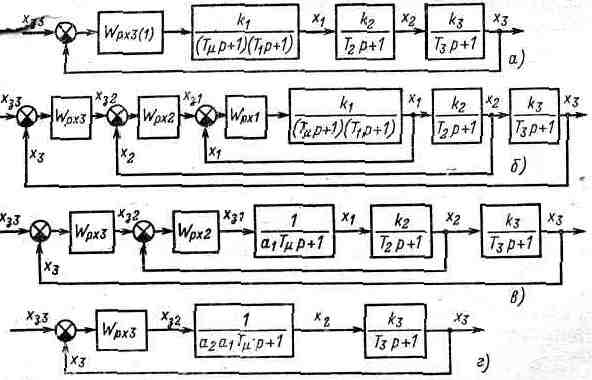
Допустим, необходимо регулировать выходную переменную x3электропривода, структурная схема которого показана на рис. 5.16, причем по условиям помехозащищенности желательно применять регуляторы не сложнее ПИ-регулятора. Эту задачу можно решить, если ввести вспомогательные контуры регулирования таким образом, чтобы в каждом контуре оказалась только одна из подлежащих компенсации постоянныхT1Tl.
В структуре на рис. 5.16, ав контуре регулирования х3требуется, чтобы имелась компенсация трех больших и средних постоянныхT1, T2,T3и регуляторWpx3(1)при одноконтурной системе в передаточной функции содержал бы дифференцирующую составляющую второго порядка. В соответствии с (5.36) при этом
Рассмотрим, как повлияет на регулирование координаты x3 введение двух вспомогательных контуров регулирования переменныхx1иx2(рис. 5.16, б). Для этого вначале определим передаточную функцию регулятора внутреннего контура регулирования переменнойx1, пользуясь изложенным методом.
Для первого контура желаемая передаточная функция
![]()
Передаточная функция объекта регулирования переменной x1
![]()
О![]() пределяем
передаточную функцию регулятора:
пределяем
передаточную функцию регулятора:
г![]() де
де
Рис. 5.16, Введение, подчиненных контуров регулирования
Как и требовалось, получен ПИ-регулятор. Передаточная функция замкнутого первого контура
![]()
С учетом (5.42) передаточная функция объекта регулирования переменной Хд принимает вид
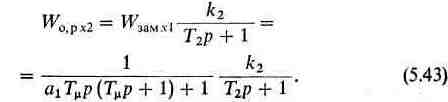
Если выбрать a1таким образом, чтобы внутренний контур представлял собой высокодемпфированное звено, (5.43) можно существенно упростить. Выполненные расчеты и практика настройки регулируемых электроприводов показывают, что без большой погрешности для оценки качества регулирования в знаменателе (5.42) при переходе к (5.43) можно отбросить член второго порядка, при этом
![]()
Объект регулирования переменной х2 наглядно представлен на рис. 5.16, в. Здесь показано, что в результате введения первого контура из второго контура регулирования исключена большая постояннаяT1, а оценка некомпенсированных инерционностей второго контура принимает значениеT2=a1T. Соответственно желаемая передаточная функция для второго контура запишется в виде
![]()
Передаточная функция регулятора Хд получается путем деления (5.45) на (5.44):
![]()
г![]() де
де
Вновь получена передаточная функция ПИ-регулятора. Передаточная функция замкнутого второго контура
![]()
Выборомa2и здесь обеспечиваются свойства высокодемпфированного колебательного звена, что при переходе к регулированию основной координаты x3позволяет представить Передаточную функцию объекта регулирования в упрощенном виде:
![]()
Структурная схема внешнего контура регулирования переменной x3при введении двух вспомогательных контуров регулирования, как показано на рис. 5.16, г, претерпевает существенные изменения. Сравнивая рис. 5.16, г с рис. 5.16, а, можно установить, что в результате введения контуров регулированияx1иx2на динамику внешнего контура в пределах линейности системы исключено влияние больших постоянных времениT1и T2.Однако при этом изменилась суммарная некомпенсированная инерционность контура, оценка которой составляетT3=a2a1TЖелаемая передаточная функция при этом запишется в виде
![]()
Передаточная функция регулятора x3
![]()
![]()
где — постоянная времени ПИ-регулятора переменной x3.
При принимавшихся по мере решения задачи допущениях передаточная функция замкнутого внешнего контура регулирования приближенно соответствует колебательному звену второго порядка:
![]()
Из изложенного следует, что введение вспомогательных контуров регулирования имеет целью формирование благоприятной для последовательной коррекции передаточной функции объекта регулирования (рис. 5.16, г). Вспомогательные контуры называют подчиненными контурами регулирования,а структура на рис. 5.16, б. представляет собойструктуру подчиненного регулирования координат электропривода.

Рис. 5.17. Графики переходных процессов при различных ai;
Динамические показатели качества регулирования каждой переменной определяются соотношением постоянных аi. На рис. 5.17 представлен ряд зависимостейxi=f(t)при различных значенияхai.Еслиai= 4, переходный процесс имеет апериодический характер, а время регулированияtptп.п= (68)T.Уменьшениеа1доа1= 2 явно увеличивает колебательность, появляется перерегулирование, при этом время регулирования уменьшается. Дальнейшее уменьшениеaiвлечет за собой быстрое возрастание колебательности и перерегулирования, а эффект уменьшенияtpпостепенно снижается.
Кривая, соответствующая а1 = 2, на рис. 5.17 выделена утолщенной линией. Это значение соотношения постоянных контура регулирования обеспечивает минимальное время регулирования tp= 4,7Tпри практически пренебрежимом перерегулированииx1 max =0,043. Такая настройка оптимальна для множества электроприводов, поэтому используется в качестве основной стандартной настройки и называется настройкой натехнический оптимумилиоптимум по модулю.
При настройке всех контуров регулирования на технический оптимум (аi= 2) передаточную функцию i-го разомкнутого контура с помощью (5.45) и (5.49) можно записать так:
![]()
То же для замкнутого контура:
![]()
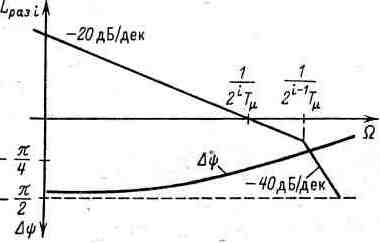
Рис. 5.18. Частотные характеристики при настройке на технический оптимум
Следовательно, при принятых допущениях переходные процессы в i-м контуре при настройке на технический оптимум по характеру совпадают с представленным для a= 2 на рис. 5.17. Расчетами установлено, что в результате влияния отброшенных в (5.52) и (5.53) членов более высокого порядка при увеличении номера контураiнесколько увеличивается перерегулирование и возрастает колебательность. Однако в большинстве случаев это влияние можно полагать пренебрежимо малым.
Логарифмические частотные характеристики i-гoконтура, настроенного на технический оптимум, представлены на рис. 5.18. Рассматривая ЛАЧХ, можно убедиться, что с увеличением номера контура i быстродействие уменьшается, так как возрастает некомпенсированная постоянная Tiи уменьшается частота срезаci= 1/2i Т. Таковы общие характеристики стандартной настройки регулируемого электропривода на технический (модульный) оптимум.
В случаях, когда требуется более высокая точность регулирования, при том же подходе применяют стандартную настройку на симметричный оптимум.При такой настройке желаемую передаточную функцию разомкнутого контура регулирования записывают в виде
![]()
Формула (5.54) записана для первого контура и может быть применена для следующих контуров, если в нее подставлять соответствующие значения Ti= 2i-1T. Здесь, как и ранее, предполагается, что все некомпенсируемые инерционности исходного объектаTзаключены в первом, внутреннем контуре. Частотные характеристики, соответствующие (5.54), представлены на рис. 5.19. Разомкнутый контур при этом обла-
Р ис.
5.19. Частотные характеристики при
настройке на симметричный оптимум
ис.
5.19. Частотные характеристики при
настройке на симметричный оптимум
дает астатизмом второго порядка, что увеличивает точность регулирования, особенно в процессах, близких к статическим. Вместе с тем наличие протяженного участка в низкочастотной части с наклоном —40 дБ/дек уменьшает запас по фазе на частоте среза и увеличивает перерегулирование, которое может достигать 56%, что во многих случаях неприемлемо.
Сравнивая рис. 5.19 с рис. 5.18, можно установить, что при средних и высоких частотах ЛАЧХ при настройках на технический и симметричный оптимум совпадают. Следовательно, быстродействие и затухание колебаний в системе при этих двух стандартных настройках примерно одинаковы.