

5.3. Система генератор-двигатель
При рассмотрении свойств электромеханического преобразователя постоянного тока с независимым возбуждением было установлено, что наиболее широкие и благоприятные возможности управления процессами электромеханического преобразования энергии обеспечиваются изменением приложенного к якорной цепи двигателя напряжения uя. Для того чтобы изменять подведенное к якорю напряжение, используют различного вида управляемые преобразователи. До сравнительно недавнего времени для этой цели преимущественно применялись электромашинные преобразователи — генераторы постоянного тока, а основной системой регулируемого электропривода была система Г — Д. В настоящее время в связи с развитием вентильных преобразователей ее применение сокращается, однако она продолжает успешно применяться во многих ответственных промышленных установках.
Принципиальная схема системы Г—Д представлена на рис. 5.4,a. Электромашинный преобразовательный агрегат состоит из приводного двигателяПД,который приводит во вращение со скоростьюwЕгенератор постоянного токаГ. Квыводам якоря генератора подключен якорь двигателяД, который приводит во вращение со скоростью со исполнительный механизмИМ.Обмотка возбуждения генератораОВГ для управления ЭДС генератораЕг подключена к выходу возбудителяТВ.При необходимости управления полем двигателяДего обмотка возбужденияОВДможет быть также снабжена индивидуальным управляемым возбудителем. На рисунке для выявления свойств собственно системы Г — Д обмотка возбуждения двигателя показана включенной на номинальное напряжение возбужденияUв.номи принимается, что поток двигателя Ф = Фном=const.
Характеристики основных элементов системы Г — Д для наглядности показаны на том же рисунке в непосредственной близости от соответствующих элементов. Рассмотрим с их помощью особенности системы Г — Д как объекта управления.
В качестве приводных двигателей ПДприменяются либо асинхронные, либо синхронные двигатели (па рис. 5.4.адля случая использования синхронного двигателя штриховой линией показана цепь питания его отмотки возбуждения, ток которойIв.с, а напряжение питанияUd/c). Механическая характеристика1(рис. 5.4,6) асинхронного двигателяПДобладает конечной статической жесткостью. Поэтому при изменении нагрузки на валу, создаваемой генераторомГпри работе электропривода, скорость преобразовательного агрегата в небольших пределах изменяется (ωг=var).
При использовании синхронного двигателя его скорость в статических режимах работы при разных нагрузках генератора остается неизменной (ωг=const, прямая 2 на рис. 5.4,6). Однако и в этом случае в динамических процессах скорость агрегата изменяется из-за ограниченной динамической жесткости механической характеристики синхронного двигателя βдин. В качестве примера на рис. 5.4,б показана динамическая механическая характеристика3для случая установившихся колебаний нагрузки. Эта характеристика показывает, что н при синхронном двигателе в динамических процессах скорость агрегата может изменяться в небольших пределах относительно синхронной скорости двигателя ωг# ωг0.
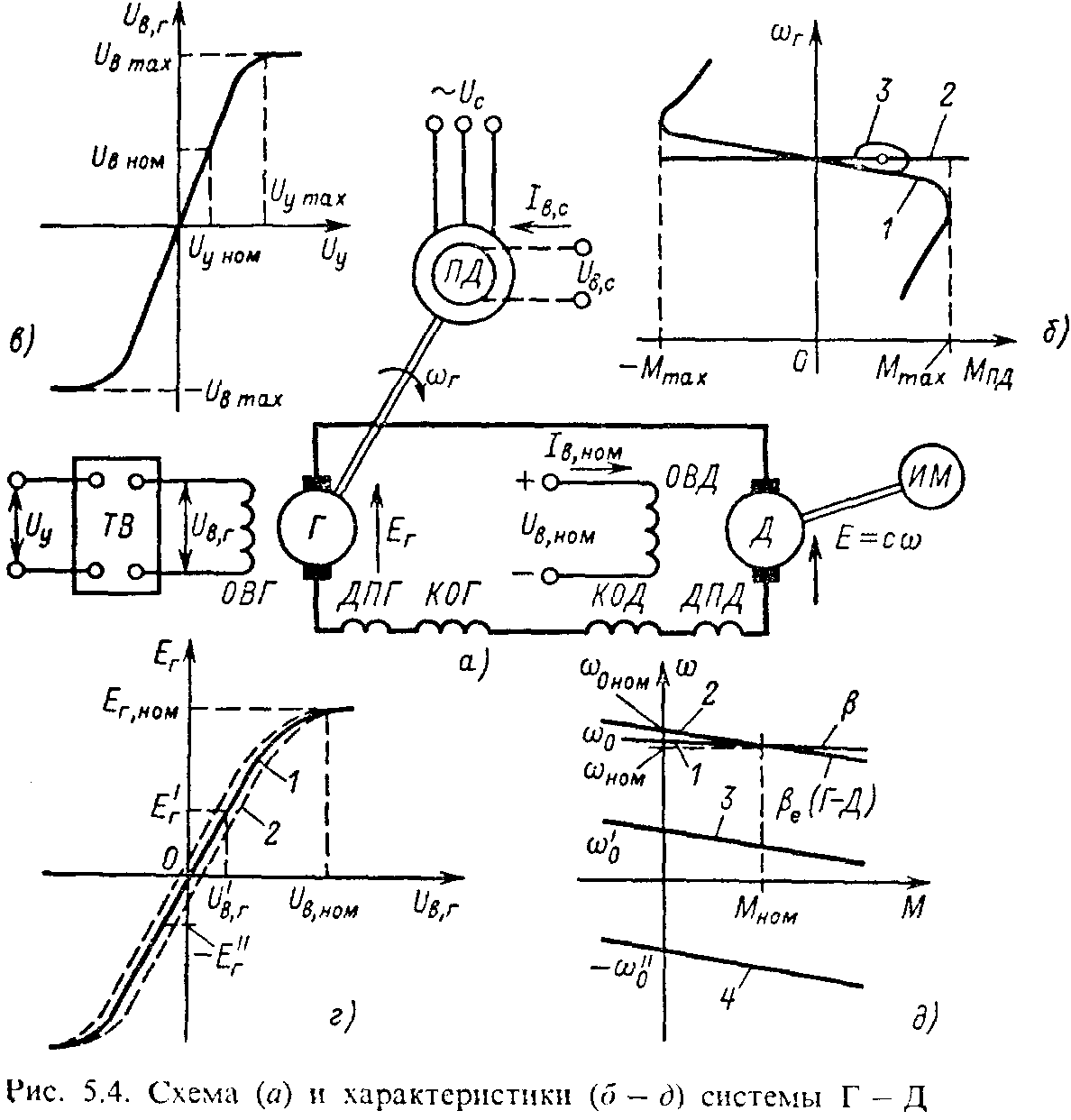
Изменения скорости генератора приводят к изменению его ЭДС, следовательно влияют на работу электропривода. В частности, при асинхронном ПД сростом нагрузки электропривода в двигательном режиме возрастает тормозной момент генератора и в соответствии с кривой 1 на рис. 5.4, в скорость ωги ЭДС генератора Ег=k1Фг ωгпостепенно снижаются, что сказывается на скорости двигателя. В мощных электроприводах, для которых и применяется система Г—Д, это снижение составляет 1,5—2% и вызывает примерно такое же снижение скорости электропривода со в дополнение к другим факторам.
Преимуществами асинхронного приводного двигателя являются его меньшая колебательность, большая простота н надежность. Однако следует учитывать, что благодаря возбуждению постоянным током синхронный двигатель менее критичен к колебаниям напряжения сети, особенно при наличии системы автоматического регулирования тока возбуждения.
Номинальная мощность возбуждения мощных генераторов постоянного тока Рв.ном=Uв.номIв.номдостигает 0,5— 1% номинальной мощности генератора, т. е. составляет киловатты и десятки киловатт. Для осуществления автоматического регулирования коэффициент усиления системы Г—Д поmoщhocти и недостаточен, поэтому в цепь возбуждения генератора вводятся усилия мощности.
До недавнего времени для этой цеди использовались электромашинные и позже магнитные усилители. Последние еще находят применение в ряде cepийныxэлектроприводов, выпускаемых в настоящее время. Однако основным видом возбудителей в современных системах Г-Д являются теристорные и транзисторные преобразователи, обладающие весьма высоким быстродействием и коэффициентом усиления но мощности. составляющим сотни тысяч. Примерная характеристика тиристорного возбудителяUв.1=fUупредставлена на рис. 5.4,в. При линейной зависимости угла регулирования отUурабочий участок составляет часть синусоиды, при арккосинусоидальном он линеен. При дальнейшем рассмотрении эта кривая и в первом случае линеаризуется без большой погрешности. С учетом небольшого запаздывания и малых постоянных времени фильтров (Т∑=Тт.в) динамические процессы тиристорного возбудителяТВпри этом описываются уравнением
kт.в.Uу=(1+ Тт.вp)Uв.г. (5.4)
где kт.в=Uв.г./ Uукоэффициент усиления тиристорного возбудителя по напряжению.
Следует заметить, что основным видом тиристорного возбудителя в настоящее время является преобразователь с раздельным управлением, в характеристике которого в зоне прерывистых токов проявляется неоднозначность. Однако в связи с большой постоянной времени нагрузки это влияние незначительно и здесь не учтено.
Основной элемент энергетической части системы управления — генератор Г — также обладает нелинейной и неоднозначной характеристикой Ег=f(Uв.г) при ωг=const, которая представлена на рис. 5.4,гкривой 1, линейной на основной части при ненасыщенной магнитной цепи. Вследствие гистерезиса в ней проявляется существенная неоднозначность (кривая 2). Учет гистерезиса усложняет анализ динамических процессов, так как каждым изменениям возбуждения соответствуют частые петли гистерезиса, лежащие внутри предельной петли 2, соответствующей циклам перемагничивания от + Ег.ном до - Ег.ном и обратно. Для выявления основных динамических свойств системы Г — Д гистерезисом можно пренебречь и для линейного участка характеристики 1 записать
kгUв.г=(1+Тгp)eг, (5.5)
где kг =Ег/Uв.г при ωг= const; Тг=Lв.г/Rв.г— постоянная времени генератора.
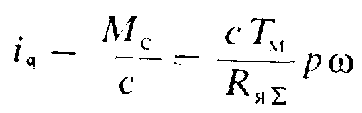
Уравнение механической характеристики электропривода, управляемого по системе Г — Д, получим с помощью уравнения электрического равновесия для якорной цепи машин:

![]()
![]()
![]()
![]()
Уравнение (5.6) можно представить в виде
![]()
где с =KфНом— коэффициент ЭДС двигателя; ω0= ег/с — скорость идеального холостого хода в системе Г—Д;Тя = Lя∑/ Rя∑.
Заменив в (5.7) iянаМ = ciя,,получим уравнение механической характеристики в системе Г—Д:
![]()
где βс= с2/ модуль статической жесткости механической характеристики в системе Г—Д.
Сравнивая (5.8) с (3.41), можно установить их полную аналогию по форме. При принятых допущениях механические характеристики двигателя при питании от сети и от индивидуального генератора отличаются только значениями Rя∑иLя∑,если в качестве управляющего воздействия рассматривать не напряжениеuя, а ЭДС генератора ег.
На рис. 5.4,д представлена естественная механическая характеристика двигателя при питании от сети (прямая /) и естественная характеристика в системе Г—Д (прямая 2). Так как генератор имеет примерно ту же мощность, что и двигатель, тоRя∑.дв≈Rя∑г. Соответственно модуль жесткости в системе Г—Д примерно в 2 раза меньше, чем модуль жесткости (3 при бесконечно мощной сетиRя∑в≈2Rя∑дв..
Характеристика 2 соответствует такой ЭДС генератора Ег=Ег.ном при которой двигатель работает в номинальном режиме приМ= Мном, ω =ωном.
Это значение Е1больше, чем номинальное напряжение двигателя:
![]()
Как следствие, в разомкнутой системе Г—Д скорость
идеальною холостого хода (ω0ном = Ег.ном/с больше, чем ωо=Uном /с при питании от сети.
Изменением ЭДС генератора Егв системе Г—Д обеспечивается непрерывное плавное управление моментом и скоростью электропривода во всех четырех квадрантах координат механической характеристики при неизменной жесткости βе=const.
В качестве примера на рис. 5.4, дпоказаны две искусственные характеристики3и 4, соответствующие значениям Ег= Е'г=constи Ег= — Е’’г=constна рис. 5.4, г
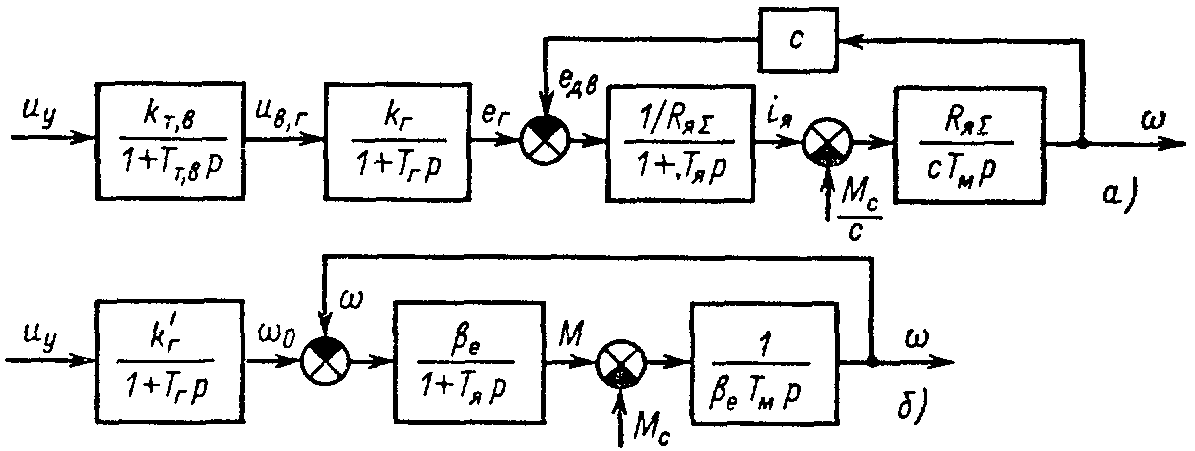
С помощью уравнений(5.4)-(5.6) и уравнения движения электропривода при с12 = ∞ в виде
на рис. 5.5, апостроена структурная схема системы Г - Д. Сравнивая эту схему со схемой на рис. 4.7, можно установить, что динамические свойства системы Г — Д по отношению к управляющему воздействию еганалогичны рассмотренным в гл. 4. Колебательность электропривода определяется соотношением постоянных временит==ТМ/Тя, а характер изменения скорости в переходных процессах задается законом изменения ег=f(t) аналогично тому, как это было рассмотрено в § 4.9 приuя=f(t).
Опираясь на проведенный выше анализ, можно сделать вывод, что если изменять напряжение uупо закону, обеспечивающему линейное нарастание ЭДС генератораег = bt, то в системе Г—Д ω0= (b/c)t=ε0t и зависимости моментаМ (t)и скорости ω(t) будут иметь при прочих равных условиях тот же характер, что и на рис. 4.30.
Отличием структуры системы Г — Д от рассмотренной выше структуры разомкнутой системы является наличие в цепи формирования управляющего воздействия двух инерционных звеньев с постоянными Тт.вв иТг.Постоянная времени Тт.вв при полупроводниковой системе импульсно-фазового управления тиристорным возбудителем весьма мала: Тт.в=0,01 с. Постоянная времени цепи возбуждения генератора Тг, напротив, весьма велика: Тг= 1 ÷ 3 с. Поэтому во многих случаях можно без заметной погрешности принять Тт.в≈ 0 и, обозначивk'г = kт.вkг/c,представить структурную схему системы Г—Д, как показано на рис. 5.5,6. Рассматривая эту схему, можно
заключить, что при изменении управляющего воздействия uускачком ЭДС генератора и скорость ω0в системе Г — Д изменяются по закону, определяемому переходной функцией инерционного звена с постоянной Тг:
![]()
Процессы в электромеханической системе с линейной механической характеристикой при изменении ω0 по закону (5.10) были рассмотрены также в § 4.9 и полностью характеризуют процессы в системе Г-Д при скачке управляющего воздействия. Из (5.10) можно определить начальный темп нарастания управляющего воздействия:
![]()
При данной Тгон определяется приложенным к обмотке возбуждения генератора напряжениемUв.г=kт.вUуи достигает наибольшего значения приUв.max=kт.вUу.max(см. рис. 5.4, в). Для получения требуемого времени нарастания ЭДС генератора до номинального значенияtвнеобходимо форсировать процессы возбуждения путем повышения приложенного напряжения. Требуемый коэффициент форсирования α=Uв.max/Uв.ном определяется из соотношения
![]()
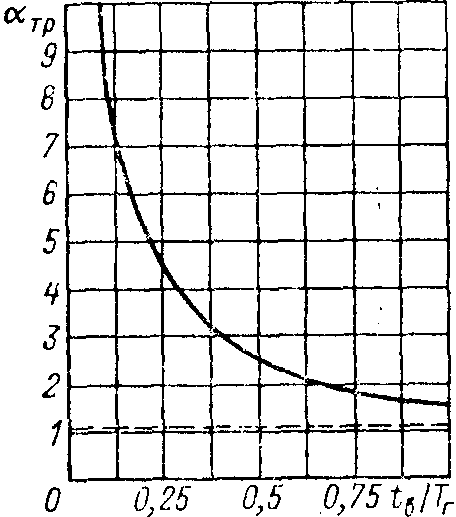 Зависимое αтр=f(tв/Тг)
представлена на рис. 5.6. Так как при малых
Тм << Тг tв≈tп,
гдеtп - требуемое
время пуска, анализируя (5.12) и рис. 5.6,
можно заключить, что и системе Г-Д
теоретически достижимо любое малое
время пуска, однако при весьма больших
коэффициентах форсирования αтр.
Так как требуемая мощность возбудителя
Зависимое αтр=f(tв/Тг)
представлена на рис. 5.6. Так как при малых
Тм << Тг tв≈tп,
гдеtп - требуемое
время пуска, анализируя (5.12) и рис. 5.6,
можно заключить, что и системе Г-Д
теоретически достижимо любое малое
время пуска, однако при весьма больших
коэффициентах форсирования αтр.
Так как требуемая мощность возбудителя
Рв.тр= αтрUв.номIв.ном= αтр Рв.ном (5.13)
п
Рис. 5.6. Требуемые
значения
коэффициента
форсировки
α=f(tв/Тг)
В заключение оценим экономичность системы Г — Д. Массогабаритные, и энергетические показатели ее определяются необходимостью присущего этой системе трехкратного электромеханического преобразования энергии в трех входящих в систему электрических машинах: ПД, Г и Д.Как следствие, установленная мощность машин привода возрастает втрое, и благоприятные регулировочные возможности достигаются ценой существенных дополнительных затрат дефицитной меди, высококачественной стали и труда. Установка вращающегося преобразовательного агрегата требует сооружения специального фундамента, центровки агрегата, тщательной настройки коммутации тока коллектором генератора. Хотя регулирование путем изменения напряжения на якоре не вызывает дополнительных потерь в двигателеД,преобразование энергии двигателемПДи генераторомГсопровождается ее потерями и общий КПД системы Г — Д снижается:
![]()
где ηдв,ηг, ηПД - соответственно КПД электрических машинД, ГиПД.
Достоинствами системы Г — Д являются отсутствие искажении потребляемого из сети тока и относительно небольшое потребление реактивной мощности даже при асинхронном ПД.При применении синхронного двигателя в преобразовательном агрегате путем регулирования тока возбуждения можно обеспечить работу электропривода сcosφ=1 или с опережающимcosφ для компенсации реактивной мощности, потребляемой другими установками.
В эксплуатации вращающийся преобразовательный агрегат, особенно его подшипники и коллектор генератора, требуют внимания и ухода. При надлежащем уходе система Г-Д хорошо зарекомендовала себя в условиях эксплуатации.