

2.6.3. Синтез кривошипно-коромыслового механизма по известному углу размаха коромысла и длине стойки
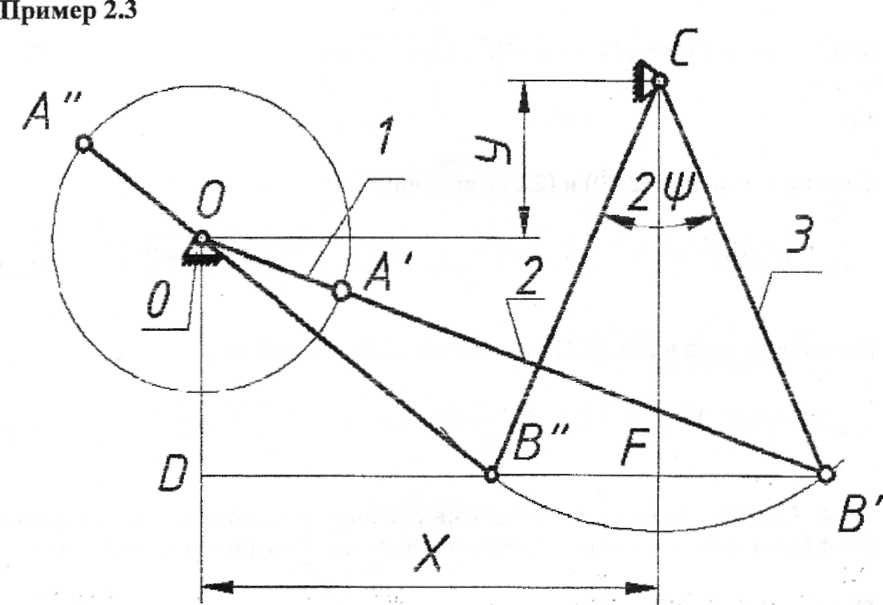
Рисунок 2.9 - Кривошипно-коромысловый механизм
Дано:
2ψ- угол размаха коромысла;
X, У - координаты положения оси вращения коромысла относительно оси вращения кривошипа;
R- длина коромысла.
Определить длину шатуна l и длину кривошипа .
Решение:
Недостающие размеры механизма определяем, исходя из крайних положений механизма (рисунок 2.9):
Из ∆B”CF определим:
B”F = R∙ sinφ , CF = R∙cosφ .
Из ∆DOB” видно, что:
OB”=√ OD2+(DB”)2
или
OB” = √ (R∙cosφ – У)2 + (X - R∙ sinφ)2. (2.34)
Из ∆DOB’ найдем:
OB’ = √OD2+(DB’)2
или
OB” = √ (R∙cosφ – У)2 + (X + R∙ sinφ)2, (2.35)
где
OB” = l – r, OB’ = l + r.
Сложив уравнения (2.34) и (2.35), получим:
√ (R∙cosφ – У)2 + (X - R∙ sinφ)2 + √ (R∙cosφ – У)2 + (X + R∙ sinφ)2
l = ————————————————————————
Вычитая из уравнения (2.35) уравнение (2.34) определим:
√ (R∙cosφ – У)2 + (X + R∙ sinφ)2 - √ (R∙cosφ – У)2 + (X - R∙ sinφ)2
r = —————————————————————————— . (2.36)
2
2.6.4 .Синтез кривошипно-коромыслового механизма по заданному коэффициенту изменения скорости графоаналитическим методом
Пример 2.4
Дано: К- коэффициент изменения средней скорости;
R - длина коромысла ВС;
L - длина стойки ОС;
δ - угол между стойкой ОС и нижним положением коромысла.
Определить: длину кривошипа и длину шатуна l.
Решение:
Вычерчиваем механизм в крайнем нижнем положении, для чего на чертеже,вмасштабе,откладываем длину стойки L, под углом δ вычерчиваем
К оромысло
СВ=R
(рисунок 2.10)
оромысло
СВ=R
(рисунок 2.10)
Рисунок 2. 10 – Кривошипно – коромысловый механизм
Из ∆OCB’:
OB’ = √OC2 + (CB’)2 - 2∙ OC ∙ (CB’) ∙ cosδ
или
l – r = √ L2 + R2 - 2∙ L∙ R∙ cosδ
l-r можно определить другим способом, замерив отрезок О В' на чертеже и умножив его величину на масштабный коэффициент длины us. Рассчитаем величину угла размаха шатуна θ по формуле:
θ = 180˚ (К - 1) / (К+1) .
Отложив этот угол от крайнего нижнего положения шатуна на чертеже, вычерчиваем второе крайнее положение механизма:
r+ l = OB’ ∙ µs .
Замерив OB" на чертеже и умножив на величину этого отрезка на масштабный коэффициент μs, получим сумму длин кривошипа и шатуна. Далее, сложив О В' и О B΄΄, получим:
(OB’ + OB”) ∙ µs
l = ——————— . (2.37)
2
Вычитая из OB” отрезок OB’ , получим
(OB’ - OB”) ∙ µs
r = ——————— . (2.38)
2
2.7. Синтез кривошипно-ползунных механизмов
Для преобразования вращательного движения входного звена в возвратно-поступательное движение выходного звена или для преобразования поступательного движения входного звена во вращательное движение выходного применяются кривошипно-ползунные механизмы. В технологических машинах входным звеном обычно является кривошип, а в машинах-двигателях - ползун.