

ЗМІСТ
Аркуш
Завдання на курсовий проект ...............................…...........................…..................……..3
СТРУКТУРНЕ ДОСЛІДЖЕННЯ ВАЖІЛЬНОГО МЕХАНІЗМУ ...............…………..….....7
1.1 Визначення розмірів кулісного механізму ………………..…………........………...7
1.2. Структурний аналіз кулісного механізму …………….……………….............……8
КІНЕМАТИЧНЕ ДОСЛІДЖЕННЯ ВАЖІЛЬНОГО МЕХАНІЗМУ .............................….....9
2.1. Розрахунок і побудова планів механізму .....................................................................9
2.2. Розрахунок і побудова планів швидкостей ........................................................………
2.3. Розрахунок і побудова планів прискорень ........................................................………
ДИНАМІЧНЕ ДОСЛІДЖЕННЯ МАШИННОГО АГРЕГАТУ СПОСОБОМ МЕРЦАЛОВА.
3.1. Розрахунок і побудова діаграм зведених моментів Mc() i Mдв(). .............…..............
3.2. Розрахунок і побудова діаграм робіт. ...........................................................…..............
3.3. Розрахунок і побудова графіків приросту кінетичної енергії. ......................................
3.4. Визначення номінальної потужності двигуна. ………………….............…............
3.5. Розрахунок маховика. ………………………………………………………................
3.6. Розрахунок кутового прискорення кривошипа. ……………………………...............
КІНЕТОСТАТИЧНЕ ДОСЛІДЖЕННЯ ВАЖІЛЬНОГО МЕХАНІЗМУ ..................................
4.1. Визначення зовнішніх та інерційних навантажень на ланки механізму ......................
4.2. Силовий розрахунок структурних груп. ..........................................................................
4.3. Силовий розрахунок початкового механізму. ………....................................................
РОЗРАХУНОК ЗУБЧАСТОГО МЕХАНІЗМУ .................................…………….........................
5.1. Розрахунок параметрів планетарного редуктора …………………………………….
5.2. Розрахунок евольвентного зачеплення ...........................................…………...............
СИНТЕЗ КУЛАЧКОВОГО МЕХАНІЗМУ ......................................................….........................
6.1. Розрахунок і побудова кінематичних діаграм штовхача .............................................
6.2. Визначення мінімального радіуса кулачка .................................................…..............
6.3. Побудова теоретичного та робочого профілів кулачка .............................…..............
ЛІТЕРАТУРА .....................................................................……………….....……...........................
ДОДАТОК – креслення:
Лист 1. Кінематичне дослідження важільного механізму
Лист 2. Динамічне дослідження важільного механізму.
Лист 3. Кiнетостатичне дослідження важільного механізму.
Лист 4. Синтез зубчастого зачеплення і планетарного редуктора
Лист 5. Синтез кулачкового механізму.
ЗАВДАННЯ
на виконання курсового проекту
з курсу ”Теорія механізмів і машин”
студентом групи 3261 _________________________________за темою:
(П. І. ПБ.)
ПРОЕКТУВАННЯ МЕХАНІЗМІВ ЗУБОДОВБАЛЬНОГО ВЕРСТАТА
До складу електромашинного агрегату входять (рис.1): асинхронний електродвигун 1, планетарний редуктор 2, робоча машина 4 (зубодовбальний верстат), муфти 5 і 6, відкрита циліндрична передача 3, що утворена зубчастими колесами а та b і за допомогою якої до агрегату приєднується кулачковий механізм 7 із роликовим штовхачем.
Зубодовбальний верстат використовується для виробництва зубчастих коліс (рис.1). Для надання руху повзуну D (рис.2), до якого приєднується супорт з ріжучим інструментом (різцем або довбачем), застосовуються кулісні механізми. Завдяки їм робоча хода здійснюється повільніше, ніж неробоча, і, отже, краще використовується потужність двигуна верстата для створення зусилля різання. Важільний механізм, що розглядається, складається (рис.2) з кулісного механізму О1АB з кулісою 3, що гойдається, і приєднаної структурної групи, до складу якої належать шатун 4 та повзун 5.
Під час (рис.2, б)
робочої ході діє сила різання Pріз,
при неробочої ході – сила опору Pнр,
що протидіє руху супорта. Стругання
виконується на ділянці, що відповідає
висоті заготівки
![]() ,
яка дорівнює 90% ходи. Тому на початку і
в кінці ходи повзуна, як показано на
діаграмі (рис.2, б)
спостерігаються пробіги інструмента,
протягом яких він не доторкається до
оброблюваного виробу.
,
яка дорівнює 90% ходи. Тому на початку і
в кінці ходи повзуна, як показано на
діаграмі (рис.2, б)
спостерігаються пробіги інструмента,
протягом яких він не доторкається до
оброблюваного виробу.
Кулачковий механізм використовується для увімкнення механізму поперечної подачі столу верстату, на якому встановлюється оброблювана деталь. Вал кулачка обертається з тією ж швидкістю, що і вал кривошипа робочої машини. Маховик 8 (рис.1) встановлений на валу кривошипа О1 (рис.2,а) забезпечує обертання вала із наданим коефіцієнтом нерівномірності .
Рис.2. Кінематична схема машинного агрегату
Передаточний
механізм, за допомогою якого передається
рух від двигуна до кривошипа, може бути
редуктором Джемсу (рис.3), або редуктором
з
мішаним зачепленням сателітів
(рис.4). Вибір той або іншої схеми редуктора
залежить від передаточного відношення
![]() .
Якщо
.
Якщо
![]() ,
тоді використовується редуктор Джемсу
(рис.3).
В іншому випадку (
,
тоді використовується редуктор Джемсу
(рис.3).
В іншому випадку (![]() )
перевага надається редуктору з
мішаним зачепленням сателітів
(рис.4).
)
перевага надається редуктору з
мішаним зачепленням сателітів
(рис.4).
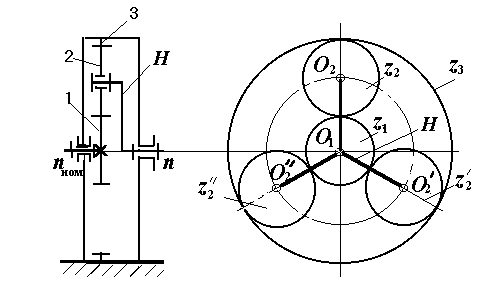
Рис.3. Редуктор Джемсу у двох проекціях
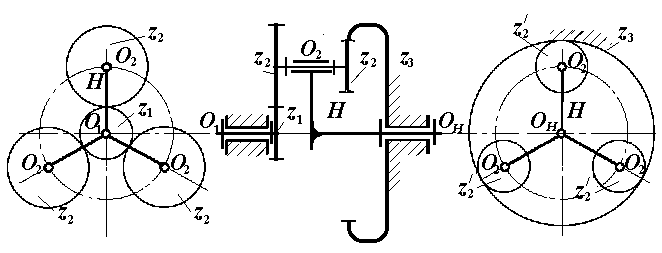
Рис.4. Планетарна передача з мішаним зачепленням сателітів
Вихідні дані та розрахункові залежності щодо їх визначення
Номер варіанта № = .
Розрахунковий коефіцієнт kp=1,15+0,01№ = ;
Машинного агрегату (рис.1)
Синхронна швидкість обертання вала електродвигуна
 ;
;Коефіцієнт зміни середньої швидкості повзуна довбального верстата
 .
.Хід повзуна
 ,
м;
,
м;
Міжосьова відстань
 м;
м;Відстань
 ,
м;
,
м;Довжина різця
 ,
м;
,
м;Зусилля різання (рис.3)
 ,
кН;
,
кН;Зусилля опору холостого ходу
 ,
кН;
,
кН;
Коефіцієнт нерівномірності обертання = 0,03;
Швидкість обертання зубчастого колеса b, яке знаходиться на валу кривошипа, (рис.1)
 ,
об/хв.
,
об/хв.
Важільного механізму
Розподілена маса ланок важільного механізму
 ,
кг/м;
,
кг/м;Довжина куліси 3
 ,
м;
,
м;Довжина шатуна 4
 ,
м;
,
м;Центри мас S3 куліси 3 і S4 шатуна 4 розташовуються згідно залежностей:
 ;
;Маса кривошипа 1
 ;
;Маса каменю 2
 ;
;Маса куліси 3
 ,
кг;
,
кг;Маса шатуна 4
 ,
кг;
,
кг;Маса повзуна
 ,
кг;
,
кг;Момент інерції куліси 3 відносно центру маси
 , кгм2;
, кгм2;Момент інерції шатуна 4 відносно центру маси
 ,
кгм2;
,
кгм2;Момент інерції каменю 2 I2 =0;
Момент інерції кривошипа
 ,
кгм2;
,
кгм2;Положення механізму
 для силового розрахунку задається у
залежності від варіанта. Якщо номер
варіанту №=14,
тоді положення
для силового розрахунку задається у
залежності від варіанта. Якщо номер
варіанту №=14,
тоді положення
 ;
при №=
58
– положення
;
при №=
58
– положення
 ;
№=
=912
– положення
;
№=
=912
– положення
 ;
№=1316
– положення
;
№=1316
– положення
 ;
№=1720
– положення
;
№=1720
– положення
 ;
№=2124
– положення
;
№=2124
– положення
 ;
№=2528
– положення
;
№=2528
– положення
 ;
№=2932
– положення
;
№=2932
– положення
 .
.
Кулачкового механізму
Діаграма аналогу прискорень
 :
:
– варіанти № = 1….10 синусоїда;
– варіанти № = 11….20 косинусоїда;
– варіанти № = 21….30 стале прискорення;
Максимальне переміщення штовхача h= 15kp,мм;
Фазові кути повороту кулачка (округлюються до цілого числа), град.:
– віддалення в = 125 + 10kp;
–дальнього вистою д
–наближення н = 155 – 10kp;
Ексцентриситет осі штовхача (округлюється до цілого числа)
 ,
мм;
,
мм;Кут передачі руху min = 60.
Зубчастого механізму:
Кінематична схема планетарного редуктора (рис.4, 5) визначається у залежності від передаточного відношення. При u 8 – застосовується редуктор Джемса (рис.4), а якщо u > 8, тоді слід застосувати редуктор із мішаним зачепленням парних сателітів (рис.5).
Модуль зубчатих коліс m =5мм;
Кількість осей сателітів в планетарної передачі K = 3;
Передаточне число відкритої передачі
 ;
;Число зубів колеса а (округлюються до цілого числа):
 ;
;Число зубів шестерні (округлюються до цілого числа) b:
 ;
;Коефіцієнт корисної дії пари зубчастих коліс у планетарному редукторі зп = 0,97.
Загальні вимоги до змісту проекту1
Розрахунково - пояснювальна записка:
Синтез важільного механізму
Структурний аналіз кінематичної схеми важільного механізму
Кінематичний розрахунок важільного механізму
Силовий розрахунок важільного механізму
Динамічне дослідження важільного механізму
Визначення моменту інерції і розмірів махового колеса з урахуванням механічної характеристики електродвигуна
Розрахунок планетарного механізму та відкритої передачі
Розрахунок кулачкового механізму
Розрахунково - пояснювальна записка виконується на стандартному папері формату А4 у відповідності до вимог ЄСКД.
Графічна частина проекту:
Лист1. Кінематичний розрахунок важільного механізму (плани механізму та швидкостей для 12 положень)
Лист2. Динамічне дослідження важільного механізму
Лист3. Силовий розрахунок важільного механізму у наданому положенні
Лист4. Кінематична схема передаточного механізму. Евольвентне зачеплення коліс a і b
Лист5. Синтез кулачкового механізму
Графічна частина проекту оформлюється на листах ватману формату А1 (594 x 841) у відповідності до вимог ЄСКД. Дозволяється оформлення листів 4 і 5 на форматі А2 (420 x 594).
Завдання видане 21 вересня 2012р.
Захист проекту грудня 2012р.
Виконавець проекту, студент групи 3261 ______________ _________________
(підпис) (П.І.ПБ.)
Керівник проекту, професор ________________ Ю. М. Кіпрєєв
(підпис) (П.І.ПБ.)