

Анализ картины зацепления
Теоретически возможны 3 варианта.
1. А0В0 < Pb, АВ < Рb, <1.
В этом случае одна пара зубьев выходит из контакта прежде, чем вторая пара входит в контакт. Образуется зазор, который выбирается с ударом. Зацепление получается прирывисто–ударным. Как следствие – быстрый износ зубьев, неравномерность вращения ведомого колеса. Такое зацепление недопустимо.
2. А0В0 = Pb, АВ = Рb, =1.
В зацеплении находится одна пара зубьев. Следующая пара зубьев начинает контактировать в момент выхода из контакта предыдущей пары. Теоретически можно допустить такое зацепление. Однако, вследствие допусков на изготовление зубчатых колес, погрешности в шаге, мы можем получить первый вариант зацепления, что недопустимо.
3. А0В0 > Pb, АВ > Рb, >1.
В этом случае первая пара проходит часть пути, а вторая пара уже входит в начало контакта. Следующая пара зубьев начинает контактировать раньше выхода из зоны контакта предыдущей пары зубьев. Получаем правильное плавное зацепление.
Коэффициент перекрытия прямозубых эвольвентных колес не может быть больше 2. Максимальный коэффициент перекрытия при зацеплении зубчатого колеса с рейкой =l,98.
Естественно, чем больше , тем лучше. Но > 2 только у косозубых колес (5–6), где за счет скоса зубьев в зацеплении одновременно может находится несколько пар зубьев.
Рекомендуемые величины коэффициента перекрытия для прямозубых эвольвентных передач:
силовых и высокоточных: > 1,2 ,
не силовых и не высокоточных: 1,1 .
Кинематический смысл коэффициента перекрытия
Выясним, как коэффициент перекрытия характеризует картину зацепления.
Пусть
= 1,6. Поскольку![]() то
АВ = 1,6Рb.
АВ > Рb,
следовательно, если в точке А контактируют
2 зуба, то есть еще пара зубьев на активной
части линии зацепления которая находится
в контакте.
то
АВ = 1,6Рb.
АВ > Рb,
следовательно, если в точке А контактируют
2 зуба, то есть еще пара зубьев на активной
части линии зацепления которая находится
в контакте.
Изобразим отдельно активную часть линии зацепления АВ (рис. 2). Вторая пара зубьев будет находится от точки А на расстоянии Рb. Отложим Рb на линии АВ от точки А и обозначим точку контакта k1. Пока одна пара зубьев, находящаяся в зацеплении в точке k1, пройдет расстояние k1B=0,6Рb до выхода из контакта, пара, находящаяся в зацеплении в точке А, пройдет по линии зацепления такое же расстояние. Отложим от точки А расстояние 0,6Рb (Ak2=0,6Рb). Таким образом в пределах этих расстояний на линии зацепления контактируют две пары зубьев – одна пара на участке k1B, вторая – Аk2. Эти участки называют зонами двухпарого зацепления.


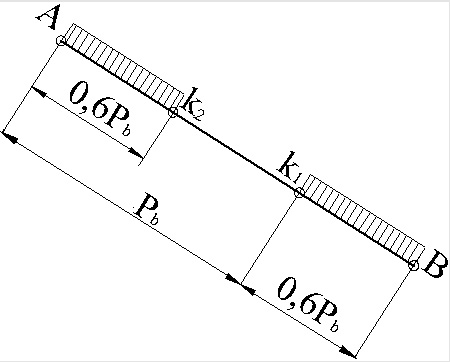
Р исунок
2 – Кинематический смысл коэффициента
перекрытия
исунок
2 – Кинематический смысл коэффициента
перекрытия
Когда предыдущая пара приходит в точку В, контакт последующей пары приходит в точку k2. От точки k2 до точки k1 контактирует одна пара зубьев: k2k1=1,6Pb–20,6Рb = 0,4Рb – зона однопарного зацепления. Таким образом только на участке активной линии зацепления, равному 0,4Рb контактирует одна пара зубьев.
Если = 1,8, то 0,8Рb – двухпарное; 0,2Рb – однопарное зацепление.
Аk2+k1В=Рb(–1); k1k2=Рb(2–).
Картина зацепления повторится через шаг:
– 1 – такую часть шага зубья несут половинную нагрузку,
2 – – такую часть шага зубья несут полную нагрузку.
Из–за коэффициента перекрытия зубья получают циклическую нагрузку: то полная, то половинная. Это учитывается при прочностном расчете зубьев.