

14. Электропривод и электроснабжение
14.1. Основные определения
14.1.1. Электрический двигатель преобразует электрическую энергию во вращательное движение, создает вращательный момент. Этот момент используется для работы исполнительного механизма.
Для совместной работы двигателя и исполнительного механизма необходимы механические согласующие элементы и элементы управления двигателем, защиты и т. п.
Электроприводом называется электромеханическая система, которая состоит из электродвигателя (электродвигателей), передаточного механизма, аппаратуры и элементов управления, защиты и охлаждения.
14.1.2. Групповой привод предусматривает использование электродвигателя для нескольких потребителей. В этом случае применяют двигатель очень большой мощности. Обычно КПД таких двигателей весьма высокий (значительно выше, чем КПД двигателей малой мощности). Но поскольку групповой привод нуждается в многочисленных механических согласующих устройствах, групповой привод в основном не используется.
Одиночный (индивидуальный) привод предусматривает использование меньших по габаритам и мощности электрических двигателей, которые имеют более низкий КПД. Но благодаря лучшей увязке с рабочей машиной такой привод в общем более экономичен.
При использовании в приводе только одного двигателя можно обходиться без механических согласующих устройств. Иногда это достигается использованием нескольких двигателей с разными характеристиками для отдельных рабочих органов исполнительного механизма. В ряде случаев передаточные устройства можно упростить или совсем не использовать благодаря применению двигателей с регулируемой скоростью вращения вала.
14.1.3. Управление исполнительным механизмом связано с изменением характеристик механического передаточного устройства (зубчатые соединения, муфты, фрикционы и др.). Электропривод дает возможность заменить механическое управление электрическим или электромеханическим. Такое управление можно автоматизировать, оно повышает темп работы механизма, выполняет функции защиты, контроля и в целом увеличивает эффективность работы исполнительного механизма.
14.1.4. Электрический двигатель приводит в движение передаточный механизм и рабочую машину. Нагрузка на валу двигателя состоит из статической и динамической составляющих. Статическая составляющая (Мст) обусловлена моментами сопротивления вращению вала (силы резания, трения, веса и др.). Динамическая составляющая (Мдин) возникает при изменении оборотов всех подвижных частей привода, т. е.
![]()
где М— вращающий момент двигателя.
Динамический момент Мдин можно определить из соотношения
![]()
где J— момент инерции. Вообще момент инерции
где т — масса тела;
r— расстояние до оси симметрии. Величина
называется радиусом инерции тела.
Обычно момент инерции определяют по формуле
![]()
Радиусы инерции тел различной формы приведены в технических справочниках.
14.1.5. Обычно между высокоскоростным двигателем и низкоскоростной рабочей машиной есть передаточный механизм. Очень важно рассчитать момент инерции системы с разными скоростями вращения отдельных частей привода. Пользуются искусственным способом
приведения системы, т. е. систему электропривода заменяют одним элементом, который вращается с угловой скоростью двигателя. Условием приведения являются постоянные энергетические условия:
![]()
где М — приведенный мимснтраоочеи машины; со — угловая скорость вала двигателя;
— действительный момент рабочей машины;
![]() — угловая скорость
рабочей машины. Передаточный коэффициент
— угловая скорость
рабочей машины. Передаточный коэффициент
![]()
позволяет получить соотношение
По
условию неизменности![]() кинетической
энергии, т. е. можно найти приведенный
кинетической
энергии, т. е. можно найти приведенный![]() момент
инерции этого привода
момент
инерции этого привода
где J
—
приведенный момент![]() инерции
системы;
инерции
системы;
|
момент инерции электродвигателя; момент инерции рабочей машины. |
14.2. Режимы работы электропривода
14.2.1. Потери в электрическом двигателе преобразуются в тепловую энергию. Нагревание двигателя изменяется по экспоненте (рис. 14.1). Считают, что мощность двигателя выбрана правильно, если его температура достигает допустимого значения при продолжительной работе электропривода.
Охлаждение двигателей электропривода можно реализовать различными путями.
Естественное охлаждение — это охлаждение двигателя за счет вращающегося ротора. Двигатель при этом не имеет специального устройства для увеличения скорости воздуха.
При самоохлаждении в зазоры между статором и ротором воздух нагнетается вентилятором, расположенным на роторе.
При принудительном охлаждении холодный воздух нагнетается вентилятором, который имеет специальный привод.
14.2.2. Режимы работы электродвигателя различают по продолжительности его включения и времени паузы. Можно привести три режима работы:
продолжительный; кратковременный; повторно-кратковременный.
14.2.3. При продолжительном режиме двигатель работает с постоянной нагрузкой длительное время. Тепло, в которое преобразуются потери в двигателе, равно отведен
ному теплу. Устанавливаются тепловое равновесие и постоянная температура двигателя
то(рис.
14.1).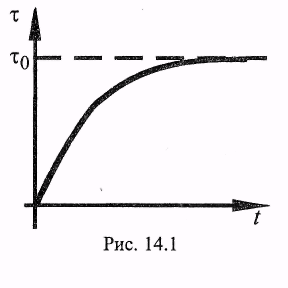
При кратковременном режиме двигатель включается на постоянную нагрузку на короткое время. При этом не достигается тепловое равновесие. После выключения двигателя выдерживается такая пауза, за время которой машина полностью охлаждается.
Повторно-кратковременный режим характеризуется периодичностью включения и выключения двигателя на нагрузку. Продолжительность работы двигателя мала и тепловое равновесие в течение одного цикла не достигается. Температура двигателя также не достигает постоянного значения, а за время паузы двигатель не охлаждается до температуры окружающей среды.
14.2.4. Вводят понятие относительной продолжительности включения (ПВ), которую выражают в процентах
![]()
где
i |
время работы двигателя с нагрузкой время выключения двигателя (пауза). |
Обычные стандартные значения ПВ = 15, 25, 40, 60%. Величина ПВ используется при выборе мощности двигателя электропривода.
14.3. Выбор мощности двигателя
14.3.1. При увязке двигателя с исполнительным механизмом нужно принимать во внимание:
мощность двигателя;
вращающий момент;
частоту вращения;
возможность изменения частоты вращения;
напряжение и род тока;
пусковые характеристики;
конструктивное исполнение и т. п.
Если мощность двигателя будет невелика, то произойдет недопустимое нагревание. При слишком большой мощности электропривод будет неэкономичным. Вращающий момент должен обеспечить пуск под нагрузкой. Но если пусковой момент будет чересчур велик, могут произойти повреждения из-за толчкообразного пуска.
14.3.2. Основным критерием выбора мощности двигателя электропривода является нагревание двигателя. Если постоянная температура г0 не превышает допустимую, то это можно считать основной зависимостью:
где
[т] — допустимая температура![]() работоспособности
отдельных элементов двигателя.
работоспособности
отдельных элементов двигателя.
Наименьшее значение [т] обычно имеют изоляционные материалы (60... 70°С). Есть несколько методов выбора мощности двигателя.
1![]() 4.3.3.
Метод
средних потерь базируется
на условии, что средние потери мощности
за цикл работы не превышают потерь при
номинальной нагрузке, т. е.
4.3.3.
Метод
средних потерь базируется
на условии, что средние потери мощности
за цикл работы не превышают потерь при
номинальной нагрузке, т. е.
где
i |
средние потери за цикл работы; номинальные потери при работе с постоянной нагрузкой |
Средние потери рассчитывают по графику нагрузки.
14.3.4. Метод эквивалентных величин предусматривает абстрактное введение расчетных (эквивалентных) токов, мощности, момента.
Эквивалентным считают такой постоянный ток, при котором в двигателе возникают такие же потери, как и при работе с переменной нагрузкой.
Эквивалентный ток можно определить как
где
Ik—реальный
ток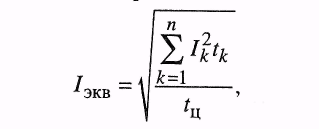 двигателя
при нагрузке в k-ош
интервале
нагрузки;
двигателя
при нагрузке в k-ош
интервале
нагрузки;
![]() — время цикла.
— время цикла.
Условием
правильного выбора двигателя электропривода
является где /н
— номинальный ток![]() двигателя.
двигателя.
14.4. Выбор типа электродвигателя
14.4.1. Выбор типа электродвигателя зависит от технических характеристик привода:
скорости вращения;
необходимости регулирования скорости вращения;
мощности;
условий пуска;
экономичности и т. п.
Анализ характеристик двигателя дает возможность согласовать электродвигатель с исполнительным механизмом и по другим показателям (конструктивным, технико-экономическим, габаритным и др.).
14А.2. Асинхронный двигатель с короткозамкнутымротором — самый распространенный в нерегулируемых приводах. Его преимуществами являются высокая надежность, простота эксплуатации, низкая стоимость. Двигатель имеет достаточно жесткую механическую характеристику в области устойчивой работы. Специальная конструкция «беличьего колеса» (глубокий паз или двойная «беличья клетка») значительно повышают пусковой момент и уменьшают пусковые токи. Обслуживание, защита, пуск и регулирование таких двигателей очень просты. Поэтому около половины электроприводов используют асинхронный короткозамкнутый двигатель. Нужно помнить, что для регулирования скорости вращения ротора можно использовать преобразователь частоты. Ступенчато регулировать скорость вращения можно путем изменения пар полюсов обмотки статора.
14.4.3. Если привод нуждается в регулировании скорости вращения в нешироком диапазоне, можно использовать асинхронный двигатель с фазным ротором. Он имеет очень большой пусковой момент, может применяться при частых включениях. Двигатель с фазным ротором целесообразно использовать в приводах подъемных кранов, прессов, лифтов, прокатных станов и др.
Двигатель с фазным ротором значительно уменьшает КПД электропривода из-за электрических потерь в регулировочном реостате. Нужно помнить, что регулирование скорости можно осуществить только в сторону уменьшения частоты от синхронной до нуля.
14.4.4. Двигатели постоянного тока удобно применять тогда, когда необходимы широкое регулирование скорости, частые пуски и реверсирования.
Двигатель параллельного возбуждения имеет жесткую механическую характеристику и используется в приводах больших станков, мощных прокатных станов, мощных экскаваторов.
Двигатель последовательного возбуждения имеет мягкую механическую характеристику, большой пусковой момент. Двигатели этого типа могут обеспечить очень высокую скорость вращения вала, устойчиво работают при большой нагрузке со значительно уменьшенными оборотами ротора. Такие двигатели применяются на электротранспорте, в приводах вспомогательных механизмов.
14.4.5. В электроприводах, требующих постоянную скорость вращения вала, применяют синхронные двигатели. Синхронные двигатели имеют очень высокие КПД и коэффициент мощности. Двигатель эффективно работает в приводах с нечастыми пусками средней и большой мощности (компрессоры, мощные насосы и т. п.).
Синхронный двигатель имеет абсолютно жесткую механическую характеристику (обороты вала практически не зависят от нагрузки). Поэтому эти двигатели используются и в специальных приводах (часовые механизмы, программные механизмы и др.).
14.4.6. Иногда привод нуждается в двигателе, который питается как от переменного, так и от постоянного напряжения. В этом случае применяют универсальные двигатели и коллекторные двигатели переменного тока. Двигатели такого типа имеют мягкую механическую характеристику, очень просто регулируются, реверсируются и запускаются. Эти двигатели имеют невысокий КПД и работают в электроинструментах, бытовых машинах, приборах. Как и двигатели постоянного тока последовательного возбуждения, они дают возможность достичь очень больших скоростей вращения (до десятков тысяч оборотов в минуту).
14.4.7. Конструкция двигателя выбирается в зависимости от условий эксплуатации. Двигатели могут охлаждаться вентилятором, который смонтирован на роторе, или иметь принудительное охлаждение. Двигатели бывают с горизонтальной или вертикальной установкой вала, иного специального исполнения. Все двигатели специального исполнения повышают стоимость электропривода.
14.5. Управление электроприводом
14.5.1. Управление электроприводом и защита двигателя от короткого замыкания и перегрузки могут быть ручными или автоматическими. Ручное управление менее эффективно и применяется в основном в приводах небольшой мощности.
Автоматическое управление поддерживает необходимый режим работы электропривода по заданной программе без участия оператора.
Управление электроприводом состоит из таких операций:
пуск и остановка двигателя;
регулирование скорости вращения ротора двигателя, торможение и реверсирование;
пуск асинхронного двигателя от источника постоянной ЭДС;
пуск двигателей постоянного тока от источника переменной ЭДС;
защита двигателей от короткого замыкания и перегрузки.
Электропривод управляется с помощью различных аппаратов и элементов управления и защиты. Электрические аппараты, в отличие от электрических машин, не преобразуют электрическую энергию в механическое движение или наоборот. Электрические аппараты — это устройства, которые превращают электрическую энергию, имеющую одни величины, в электрическую энергию с другими электрическими величинами.
14.5.2. Типичным примером автоматического управления электроприводом является управление пуском короткозамкнутого асинхронного двигателя.
Аппарат управления (магнитный пускатель) подает напряжение на трехфазную обмотку статора. При этом можно изменять чередование фаз, т. е. реверсировать двигатель. Пускатель имеет тепловые реле, которые защищают двигатель от короткого замыкания и перегрузки.
Управление пуском асинхронного двигателя с фазным ротором осуществляется автоматическим включением ступеней пускового реостата через определенные промежутки времени. Такой аппарат имеет несколько реле времени, что обеспечивает плавный разгон двигателя. Переключение ступеней дает возможность изменять скорость вращения фазного ротора.
Автоматическое управление пуском двигателя постоянного тока
также состоит в последовательном включении ступеней пускового реостата.
14.5.3. Применение современных тиристорных схем управления дает возможность значительно улучшить характеристики двигателей.
Скорость вращения ротора асинхронного двигателя зависит от скорости вращения поля
С
помощью тиристорного преобразователя
частоты можно
изменять частоту тока в обмотке
статора/j,
а следовательно, и скорость вращения
ротора. Это значительно расширяет сферу
применения асинхронных короткозамкнутых
двигателей.
преобразователя
частоты можно
изменять частоту тока в обмотке
статора/j,
а следовательно, и скорость вращения
ротора. Это значительно расширяет сферу
применения асинхронных короткозамкнутых
двигателей.
Тиристорным преобразователем можно также преобразовать постоянное напряжение в трехфазное или многофазное переменное напряжение. Таким образом через тиристорный преобразователь можно включать асинхронный короткозамкнутый двигатель на постоянное напряжение и регулировать скорость вращения его ротора.
Тиристорный преобразователь можно использовать как управляемый выпрямитель трехфазного напряжения. Через такую тиристорную схему можно включить двигатель постоянного тока на трехфазное синусоидальное напряжение. Путем изменения времени задержки включения тиристора можно изменять скорость вращения якоря двигателя постоянного тока.