

12.13. Регулирование скорости вращения якоря
12.13.1. Большим преимуществом двигателей постоянного тока является возможность регулирования скорости вращения якоря в широких пределах несколькими достаточно простыми способами.
12.13.2. Регулирование скорости вращения якоря можно рассмотреть на примере двигателя параллельного (независимого) возбуждения. Уравнение механической характеристики такого двигателя имеет вид
Из этого выражения вытекает, что есть три способа регулирования скорости вращения якоря:
изменением напряжения;
изменением сопротивления цепи якоря;
изменением магнитного потока.
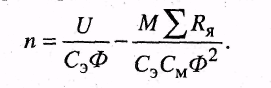
12.13.3. Регулирование изменением напряжения используется обычно в системах «генератор — двигатель».
При изменении напряжения второй член уравнения механической характеристики (характеризует наклон прямой) не изменяется. Поэтому все прямые будут параллельны друг другу (рис. 12.29). Характеристики различаются оборотами нерабочего (холостого хода (первым членом уравнения). Этим способом можно регулировать оборота в очень широких пределах, вплоть до остановки якоря. Недостатком данной способа является необходимость использования источника с регулируемой ЭДС 12.13.4. Регулирование скорости вращения якоря введением дополнительного сопротивления в цепь якоря также позволяет изменять обороты в широких пределах (до остановки якоря). |
|
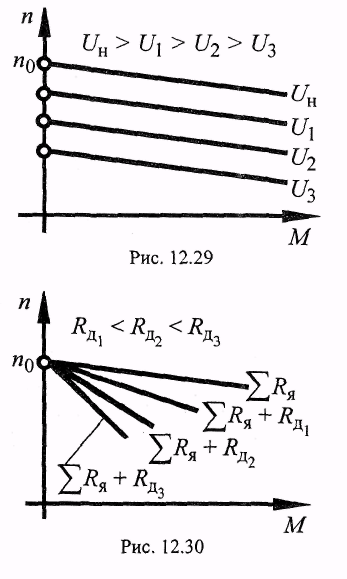
При повышении сопротивления цепи якоря увеличивается второй член уравнения механической характеристики, т. е. увеличивается наклон прямых (рис. 12.30). Этот способ невыгоден с энергетической точки зрения — возникают дополнительные потери на регулирующем реостате.
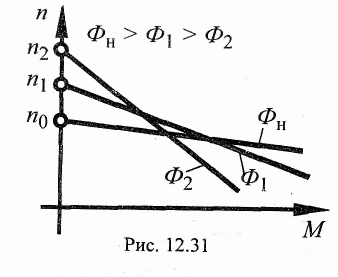
12.13.5. Изменяя ток возбуждения, можно изменять магнитный поток статора. При уменьшении потока увеличивается первый и уменьшается (в квадрате) второй член уравнения механической характеристики. Иначе говоря, есть зона, где при ослабленном потоке скорость вращения будет большей, чем скорость при номинальном потоке (рис. 12.31). Но при уменьшении тока возбуждения до нуля скорость вращения будет ограниченной:
|
Э
|
12.14. Потери в машинах постоянного тока
12.14.1. Потери и КПД машины можно рассмотреть на примере двигателя параллельного возбуждения. КПД двигателя
где
![]()
|
полезная мощность на валу
мощность, потребляемая из сети.
|
![]() Полезная мощность
на валу
Полезная мощность
на валу
где М2 — реальный вращающий момент на валу.
Мощность, потребляемая из сети,
![]()
т. е. учитываются потери энергии и в обмотке возбуждения.