Лекция 3.
1.2. Структурная схема информационно-измерительной и управляющей системы
На основании вышеизложенного и основываясь на иерархическом подходе можно представить обобщенную структуру ИУС, как техническая система как систему, в виде множеств двух видов - Мi – множество субъектов системы; Sij – множество связей между субъектами системы, характеризующие отношение между ними и прохождение информации (описание типа и протокола передачи информации). Подобный подход справедлив для любой технической системы, к которым относится и ИУС, и возможен для других систем. На рис.1.2.1 представлена структура ТС как система множеств, где приняты следующие обозначения: М1- множество исследуемых объектов;
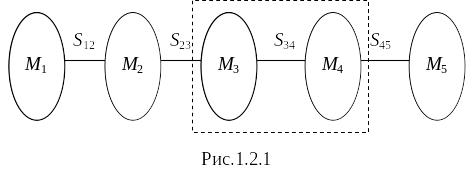
М2 - множество субъектов воздействия на М1 М3, и М4; М3
– множество преобразователей, обрабатывающих входную информацию; М4 – множество результатов преобразований информации (математический вид, электрический сигнал, оптический сигнал, видеоизображение, фото, и т.д. и т.п.); М5 - множество получателей информации из ТС и принятия решения (визуальное восприятие человеком, электрический датчик, какая-либо оптическая система управления, архив данных, и т.д. и т.п.); S12 - определяет характер взаимодействия между М1 и М2; S23 - определяет характер взаимодействия между М1М2 и М3М4, т.е. описывает передачу информации от объектов исследования на вход системы; S34 - описывает характер передачи данных с выхода М3 на вход М4; S45 – предполагает протокол обмена информации - интерфейс. Двусторонняя стрелка S12 и S23 справедлива для активных ТС (например, система активной локации объектов). Понятно, что ТС можно рассматривать как совокупность всех множеств и связей, представленных на рис.1.2.1, но не умаляя общности рассуждений и выводов в дальнейшем мы ограничимся определением ТС как совокупность множеств М3, и М4 со связями S23, S34 и S45, и по мере необходимости будем расширять.
В силу того,
что элементы множеств Мi
описывают непосредственно характеристики
этих сред, то будем называть их абсолютными
характеристиками, а элементы вида Sij,
описывающие характер отношений между
вышеозначенными множествами, определим
как относительные характеристики. В
силу выбранного временного графика
прохождения сигнала по элементам
технической системы (последовательное,
параллельное, параллельно-последовательное)
общая погрешность преобразования
является аддитивной величиной для одних
параметров (![]() ),
мультипликативной для других (
),
мультипликативной для других (![]() )
и их сочетанием для третьих (
)
и их сочетанием для третьих (![]() ),
что и отражено соотношениями 1.2.1.
),
что и отражено соотношениями 1.2.1.
|
(1.2.1) |
В структуре ТС можно выделить 3 вертикальных уровня рассмотрения, к каждому из которых могут, применимы соответствующие ему операции.
Уровень 1. Высший уровень описания ТС представлен множеством предметных сред Мi, описываемых абсолютными параметрами и совокупностью связей Sij между множествами, характеризуемыми относительными параметрами.
Уровень 2. Средний, описательный, предметно-указательный, с определением конкретных составных частей множеств Мi .
Уровень 3. Низший, конкретно-технический - указываются реальные физико-технические параметры всех составных частей ТС.
В результате системного анализа ТС должны будут определены следующие её характеристики:
Целостность системы - это когда свойства ТС не могут быть приняты без учета, хотя бы некоторых свойств подсистем и наоборот. Представление о целостности ТС проявляются как через внутренние, так и внешние связи.
Структура ТС как совокупность внутренних и внешних связей системы.
Иерархичность ТС как соподчиненность функциональных свойств.
Границы ТС.
Структура ТС, представ-ленная на рис.1.2.1, может быть положена в основу представления информационно-измери-тельных и управляющих систем как систему, в виде множеств 2-го уровня описания, что и представлено на рис.1.2.2 для ИУС, у которой входная информация в виде оптического излучения (подобные системы в дальнейшем будем обозначать - ИУСО). Подобные технические системы, как правило, могут быть отнесены к сложным системам с подсистемами разной физической природы [58,59,69]. На рис.1.2.3 представлены возможные по реализации структурные схемы ИУС, где приняты следующие обозначения: НО – наблюдаемый (исследуемый) объект; ПС – приёмная система: УПИ – устройство преобразования и представления информации; УУ – управляющее устройство; ВВ – внешние возмущения (пассивные или активируемые УУ). При этом: на рис. 1.2.3а представлена ИУСО с учетом внешних возмущений; на рис. 1.2.3б представлена ИУСО с учетом реакции объекта на внешние возмущения; на рис.1.2.3в представлена ИУСО без учёта внешних возмущений.

В общем случае схема функциони-рования и взаимодействия ИУСО с внешней средой может быть представлена как замкнутая динамическая система, к особенностям функционирования которой следует отнести:
нестационарность внешних возмущений и, как следствие этого, нестационарность процессов измерения и управления;
наличие в системе разнородных по физической природе связей;
необходимость работы в реальном масштабе времени с необходимым быстродействием.
Все информационно-измерительные и управляющие системы:
1) по принципам формирования информационного сигнала и по результатам измерения ИУС разделяют: позиционные и программные.
2) по принципам управления объектом ИУСО разделяют: по положению, скорости и ускорению, и комбинированные.
Для ИУСО характерно выполнение следующих задач [2,3,5,63,70]:
Поиск и обнаружение информационного сигнала на фоне помех в заданной информационной области поиска.
Сбор и анализ информации.
Преобразование (адаптация) информации к виду для последующих действий.
Принятие решения об управлении.
Выработка управляющего сигнала.
Контроль и коррекция качества функционирования системы.
Обобщённая
структурная схема ИУСО представлена
на рис. 1.2.4, где приняты следующие
обозначения: НО – наблюдаемый подвижный
объект; Иизл – искусственный или
естественный источник облучения НО;
ПОС – приемная оптическая система;
ПУ - пульт управления; Экст – экстраполятор;
КСУ - контур стабилизированного
управления; ОУ – объект управления; СОС
– система обратной связи с ПС; ЦВМ –
цифровая вычислительная машина (выполняет
целевую функцию);
![]() Т
- вектор текущего положения объекта
наблюдения;
Т
- вектор текущего положения объекта
наблюдения;
![]() -
оценка вектора текущего положения НО.
-
оценка вектора текущего положения НО.
«Оператор» в данной системе выполняет функцию решающего правила и преобра-зующего звена, т.е. звена, которое прини-мает решение о последующем управлении на основании принятой информации и выпол-няет соответствующее преобразование.