

Залежність обертаючого моменту від ковзання й механічна характеристика асинхронного двигуна
Для стійкої роботи двигуна важливо, щоб автоматично встановлювалася рівновага обертаючого й гальмуючого моментів: зі збільшенням навантаження на валу двигуна повинен відповідно зростати й обертаючий момент. Це урівноважування в працюючого асинхронного двигуна здійснюється в такий спосіб: при збільшенні навантаження на валу гальмуючий момент виявляється більшим обертаючого, внаслідок чого швидкість обертання ротора зменшується – ковзання зростає. Підвищення ковзання викликає збільшення обертаючого моменту, і рівновага моментів відновлюється при зростанні ковзання.
Однак залежність обертаючого моменту від ковзання досить складна. Зокрема, підвищення ковзання викликає збільшення обертаючого моменту тільки при зміні ковзання в певних межах. За цими межами порушена рівновага моментів не відновлюється – двигун зупиняється.
Щоб визначити умови максимуму моменту, виразимо величину обертаючого моменту через параметри машини:
 (5)
(5)
де
![]() -
фазна напруга обмоток статора;
-
фазна напруга обмоток статора;
![]() наведений активний опір ротора;
наведений активний опір ротора;
![]() - активний і реактивний опори статора;
- активний і реактивний опори статора;
![]() - постійна двигуна;
- постійна двигуна;
![]() - ковзання.
- ковзання.
Беремо першу похідну від моменту по ковзанню й прирівняємо її до нуля:
 . (6)
. (6)
З даного виразу випливає, що критичне ковзання sК, що відповідає максимальному (критичному) обертаючому моменту, визначається як:
 (7)
(7)
Характерна крива залежності обертаючого моменту двигуна від ковзання показана на рис. 1.
Максимум обертаючого моменту розділяє криву обертаючого моменту на стійку частину від s=0 до sк і нестійку частину від sк до s=1, у межах якої обертаючий момент зменшується з ростом ковзання. Через те, що максимальний обертаючий момент є границею між стійким і нестійким режимами роботи двигуна, він називається також перекидаючим моментом.

Рис. 1. Залежність обертаючого моменту асинхронного двигуна від ковзання
У працюючого двигуна динамічна рівновага моментів автоматично відновлюється при збільшенні ковзання, поки гальмуючий момент на валу менше максимального момента двигуна. Але коли гальмуючий момент досяг значення максимального моменту двигуна, тоді при подальшому збільшенні навантаження зростання ковзання буде лише зменшувати обертаючий момент. Таким чином, динамічна рівновага, порушена збільшенням навантаження, не відновлюється і внаслідок переваги гальмуючого моменту двигун зупиняється.
Виразимо тепер величину максимального обертаючого моменту через параметри машини. Для цього підставимо вираз критичного ковзання (7) у рівняння моменту (5), що дозволяє одержати вираз максимального моменту асинхронного двигуна в наступній простій формі:
 (8)
(8)
де
![]() фазна
напруга обмотки статора;
фазна
напруга обмотки статора;
![]() - постійна двигуна;
- постійна двигуна;
![]() - реактивний опір ротора.
- реактивний опір ротора.
Максимальний
момент визначає перевантажувальну
здатність асинхронного двигуна. Вираз
(8) показує, що![]() не
залежить від активного опору кола
ротора. У той же час критичне ковзання
пропорційне цьому опору (7). Отже, можна,
збільшуючи активний опір кола ротора,
збільшувати критичне ковзання, не
змінюючи максимальний момент. Це
використовується для поліпшення пускових
умов у двигунах з фазним ротором.
не
залежить від активного опору кола
ротора. У той же час критичне ковзання
пропорційне цьому опору (7). Отже, можна,
збільшуючи активний опір кола ротора,
збільшувати критичне ковзання, не
змінюючи максимальний момент. Це
використовується для поліпшення пускових
умов у двигунах з фазним ротором.
Та
обставина, що максимальний обертаючий
момент пропорційний![]() ,
робить асинхронний двигун досить
чутливим до зниження напруги живлення.
При значному зниженні
,
робить асинхронний двигун досить
чутливим до зниження напруги живлення.
При значному зниженні
![]() двигун
при пуску може не почати обертатися.
двигун
при пуску може не почати обертатися.
В асинхронних двигунів максимальний момент більше номінального в 2-2,5 рази.
Якщо
у рівнянні обертаючого моменту (5)
прирівняти ковзання до одиниці
![]() ми
одержимо вираз пускового моменту, тобто
моменту, що розвивається двигуном на
початку руху:
ми
одержимо вираз пускового моменту, тобто
моменту, що розвивається двигуном на
початку руху:
 (9)
(9)
Якщо потрібно, щоб пусковий момент був рівний максимальному, тобто щоб при пуску двигун розбудовував максимальний момент, то згідно (8) необхідно виконання умови :
![]() при
при
![]() (10)
(10)
Як уже вказувалося, двигун стійко працює тільки при зміні ковзання у межах від нуля до ковзання, що відповідає максимальному; у цих умовах зміна навантаження викликає лише невелику зміну швидкості обертання.
Для
цілей електропривода велике значення
має залежність швидкості обертання
двигуна від навантаження на валу![]() ця
залежність зветься механічною
характеристикою (рис.2). За формою вона
відрізняється від кривої
ця
залежність зветься механічною
характеристикою (рис.2). За формою вона
відрізняється від кривої
![]() тільки
положенням стосовно координатних осей.
тільки
положенням стосовно координатних осей.
Як показує крива рис. 2, швидкість асинхронного двигуна несуттєво знижується при збільшенні обертаючого моменту в межах від нуля до максимального значення. Така механічна характеристика називається жорсткою. В іншій своїй частині механічну характеристику асинхронного двигуна потрібно вважати м’якою.
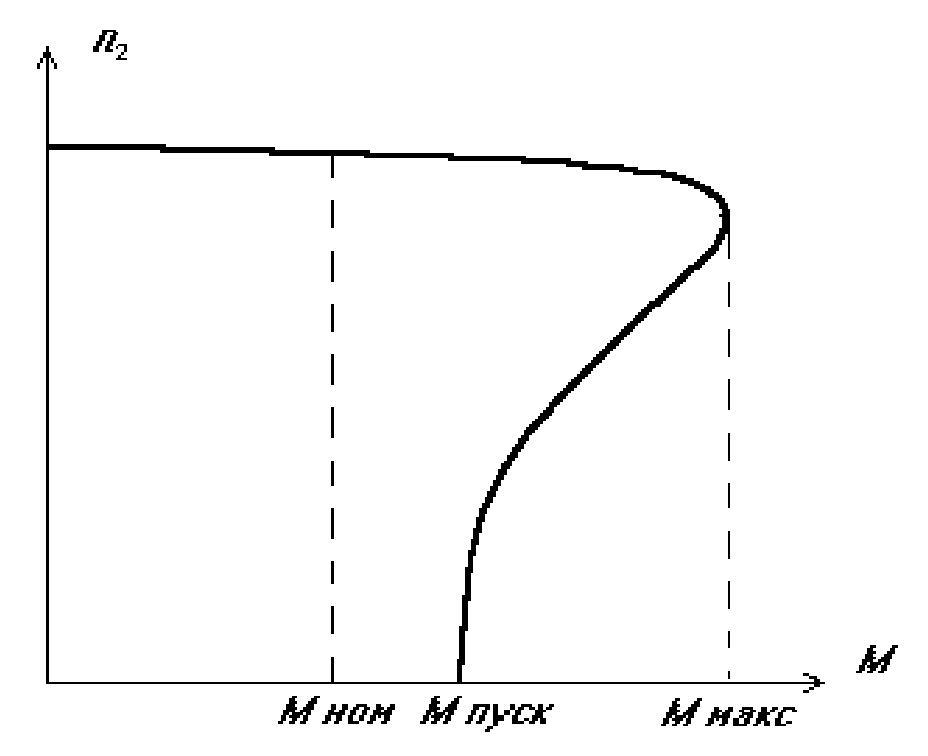
Рис. 2. Механічна характеристика асинхронного двигуна
Основним параметром, що визначає припустиме механічне перевантаження двигуна, є кратність максимального (критичного) моменту:
 (11)
(11)
Кратність
критичного моменту змінюється в межах
від 1,7 до 2,5. При перевантаженні понад
максимальне значення моменту
![]() двигун
входить в область нестійкого режиму
(якщо гальмуючий момент на валу постійний)
і зупиняється. Ця обставина змушує
вибирати двигун таким чином, щоб при
короткочасному перевантаженні не був
перевищений максимальний момент.
Оскільки напруга мережі має значні
коливання, то найбільший припустимий
момент перевантаження приймають рівним
двигун
входить в область нестійкого режиму
(якщо гальмуючий момент на валу постійний)
і зупиняється. Ця обставина змушує
вибирати двигун таким чином, щоб при
короткочасному перевантаженні не був
перевищений максимальний момент.
Оскільки напруга мережі має значні
коливання, то найбільший припустимий
момент перевантаження приймають рівним![]() .
.
Механічна характеристика, яку має АД при нормальних умовах, називається природньою механічною характеристикою. Штучною механічною характеристикою є, наприклад, характеристика двигуна з фазним ротором, коли в коло ротора включений реостата.