

3.3. Лабораторная работа №3: Методика определения границ зон потенциального сбыта продукции и услуг конкурирующих компаний (зпспу)
Рассмотрим способ определения размеров зон потенциального сбыта продукции и услуг (далее ЗПСПУ) на основе цены приобретения продукции и услуг.
Рассмотрим дуопольный рынок (рис. 3.1), где A, B – конкурирующие предприятия, P – потребитель, а lA и lB – расстояние от потребителя P до предприятий A и B соответственно. Примем, что товары конкурирующих предприятий идентичны для потребителя; расстояния между двумя предприятиями, предприятиями и потребителями всегда определяется прямой линией (евклидово расстояние); спрос определяется равномерным, т.е. на каждую единицу площади рынка приходится одинаковый объем потребительского спроса; каждое предприятие способно полностью удовлетворить весь спрос на рынке; тарифы в любом направлении одинаковы, постоянны и линейно зависят от расстояния перевозки; используется только один вид транспорта.
Выведем математическую модель для определения ЗПСПУ компаний А и В.
Рис. 3.1. Расположение предприятий-конкурентов и потребителя
При обозначенных выше ограничениях цена является единственным фактором, предопределяющим выбор большинства покупателей. Таким образом, целесообразно определить ЗПСПУ в зависимости от конечной цены товара на различных территориях.
Пусть, конечная цена на товар состоит из следующих компонентов: себестоимость производства товара, наценка производителя и транспортные расходы. Предположим, что предприятие индифферентно к возможным путям дистрибуции товара и озадачено лишь получением прибыли, тогда, наценка продавца в обоих случаях будет одинаковой. В этом случае в дальнейшем анализе наценкой производителя можно пренебречь.
Пусть себестоимость товара, производимого предприятием A составляет СА рублей; себестоимость товара, производимого предприятием B составляет СВ рублей. Расстояние между предприятиями A и B, принимается равным LAB км, расстояние от потребителя Р до предприятия A составляет lA км, расстояние от потребителя Р до предприятия B составляет lB км (рис. 3.1).
Пусть, тариф на перевозку единицы груза составляет рА руб./км в случае поставки от предприятия А и рВ руб./км в случае поставки от предприятия В. Потребитель Р имеет два варианта приобретения продукции: от предприятия А и от предприятия В. Цена товара с учетом транспортных расходов для каждого из вариантов может быть определена по формулам:
С1 = СА + рА·lA , (3.1)
С2 = СВ + рВ·lB , (3.2)
где С1 – цена продукции для потребителя Р при приобретении продукции предприятия А, руб.;
С2 – цена продукции для потребителя Р при приобретении продукции производителя В, руб.
Очевидно, что потребитель предпочтет тот вариант, при котором цена продукции будет меньше.
Очевидно также, что граница ЗПСПУ компаний будет состоять из «равновесных точек», находясь в которых потребителю безразлично, к кому их поставщиков обращаться, то есть в этих точках будет соблюдаться равенство:
СА + рА·lА = СВ + рВ·lВ (3.3)
Для того, чтобы построить ЗПСПУ компании на координатной плоскости, необходимо перейти к системе полярных координат.
Полярная система координат — система координат, ставящая в соответствие каждой точке на плоскости пару чисел: полярный угол и полярную ось. Полярная ось – это фиксированный луч, начинающийся в точке начала координат. Полярный угол – это угол между полярной осью и отрезком, соединяющим полюс (точка начала координат) и рассматриваемую точку.
Так в нашем примере (рис. 3.1) LAB будет являться полярной осью, а координаты точки Р (ограничивающие ЗПСПУ одной из компаний при выполнении условия (3.3)) будут описываться на плоскости полярным радиусом lA (lB, если строим зону для компании B), и полярным углом (β , если строим зону для компании B). При этом полюсом (точкой начала координат) будет считаться место расположения компании, для которой мы строим ЗПСПУ (компании А или В).
Итак множество координат точек P, в которых затраты на приобретение продукции у обоих поставщиков для клиента одинаковые (равенство (3.3) выполняется) будут фактически обозначать границы ЗПСПУ компаний.
Для нахождения lA и lB можно воспользоваться теоремой косинусов:
![]() (3.4)
(3.4)
Соответственно из (3.3) можно вы значение lA:
![]() (3.5)
(3.5)
Подставив (3.5) в (3.4) получим квадратное уравнение, решив которое можно получить выражение для lB.
Аналогично можно получить решение и для lA. и т.д.
Полярные углы и β задаются самостоятельно лицом принимающим решение. Границы допустимых углов приведены в столбце (4) таблицы 3.1. То есть для случая, когда:
СА=СВ
и рА=рB
следует брать углы в интервале:![]() ,
то есть их можно задать, например, от
-89 до +89 в градусах.
,
то есть их можно задать, например, от
-89 до +89 в градусах.
При СА=СВ и рА≠рВ следует брать углы в интервале от -180 до + 180 в градусах.
При
CA˃CB
и рА=рB
следует брать углы в интервале:
![]() .
.
При
CA<CB
и рА=рB
следует брать углы в интервале:
![]() .
.
Формулы для нахождения значений lA и lB приведены в таблице 3.1 ниже.
В таблице 3.1:
 ,
(3.6)
,
(3.6)
 ,
(3.7)
,
(3.7)
 ,
(3.8)
,
(3.8)
Далее координаты точек P (х и y) можно определить по формулам:
![]() (3.9)
(3.9)
Следует обратить внимание на то, что в MsExcel косинус полярного угла, необходимый для расчетов, будет определяться с помощью следующего выражения:
=COS(РАДИАНЫ(ссылка на ячейку со значением угла))
Аналогично находят синус:
=SIN(РАДИАНЫ(ссылка на ячейку со значением угла))
Когда будут получены координаты точек P, ограничивающие ЗПСПУ, например, компании А, можно будет построить границу зоны компании А в декартовых координатах. Для этого в MsExcel необходимо использовать инструмент «Точечная диаграмма» со значениями, соединёнными сглаживающими линиями.
В диалоговом окне на вкладке Диапазон данных очистить поле Диапазон. Перейти на вкладку Ряд и нажать кнопку Добавить. Перейти в поле Имя и ввести в него строковое значение «Предприятие A». В поле Значения X ввести ссылку ={0}, в поле Значения Y ввести ссылку ={0} /напоминим еще раз, что поскольку мы строим ЗПСПУ для компании А, то место расположения компании А указывается в точке начала координат, то есть (0; 0)!/. Ещё раз нажать кнопку Добавить, перейти в поле Имя и ввести строковое значение «Предприятие B». В поле Значения X ввести ссылку ={расстояние между городами по условию задачи}, в поле Значения Y ввести ссылку ={0}. Далее нажать кнопку Добавить и в поле Имя ввести строковое значение «ЗПСПУ предприятия A». В поле Значения X ввести ссылку на диапазон полученных ранее координат X точки P при различных значения полярного угла, а в поле Значения Y ввести ссылку на диапазон полученных ранее координат Y точки P при различных значения полярного угла. Нажать кнопку Готово.
Аналогичным образом поступают, когда необходимо строить зону для компании B.
Необходимо отметить, что перед тем как приступить к построению ЗПСПУ компаний, следует прежде всего проверить ограничения (столбцы 1, 2, 4, 5 таблицы 3.1), в зависимости от выполнения (или невыполнения) которых будет определено, для какой компании можно будет построить ЗПСПУ и какая конфигурация у ЗПСПУ будет!
Примеры возможных форм конфигурации ЗПСПУ приведены в таблице 3.2.
Таблица 3.1
Формулы расчета полярных координат точек построения ЗПСПУ для двух конкурирующих предприятий
Вариант |
Подва-риант |
Формула |
Ограничения |
Примечания |
1 |
2 |
3 |
4 |
5 |
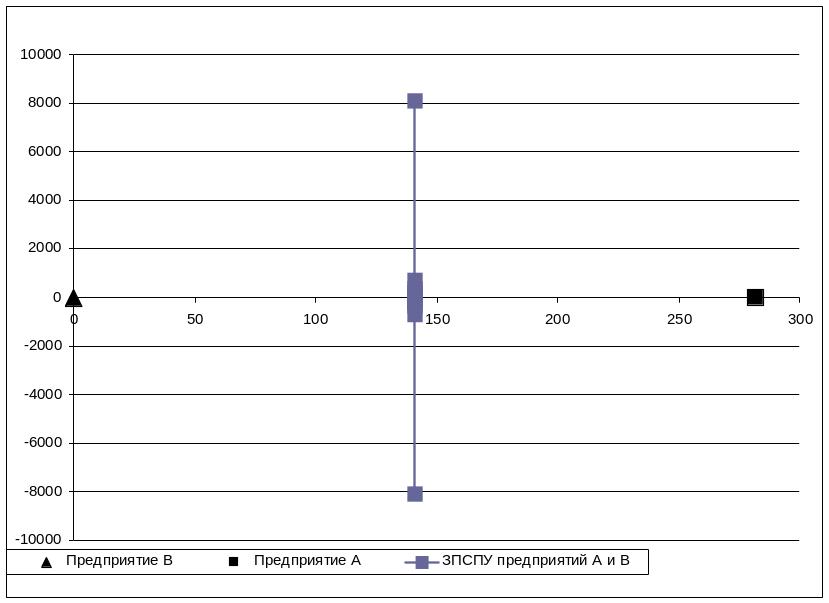
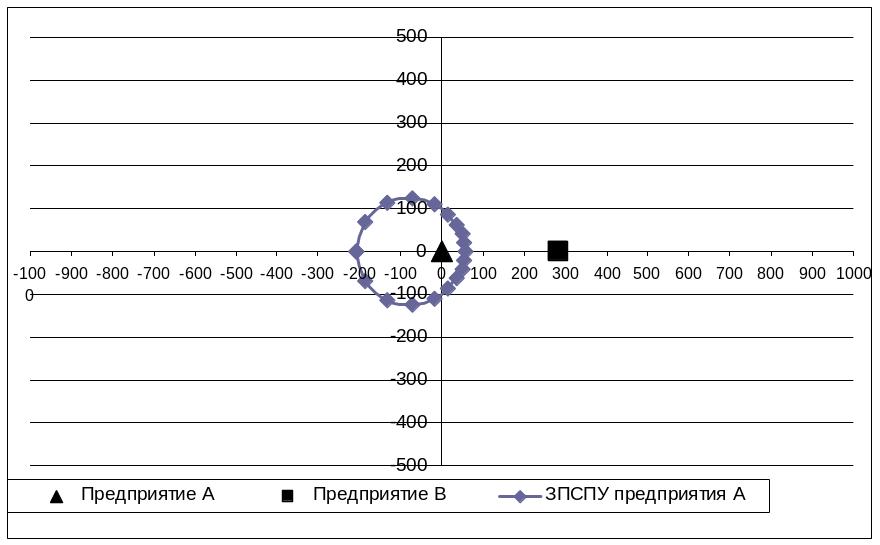
№1 СА=СВ=C и рА=рB |
НЕТ |
|
|
и стремятся от 0 к ±π/2. При этом lA и lB стремятся к бесконечности. ЗПСПУ предприятий A и B равны и отсекаются перпендикуляром, делящем полярный радиус LAB пополам. |
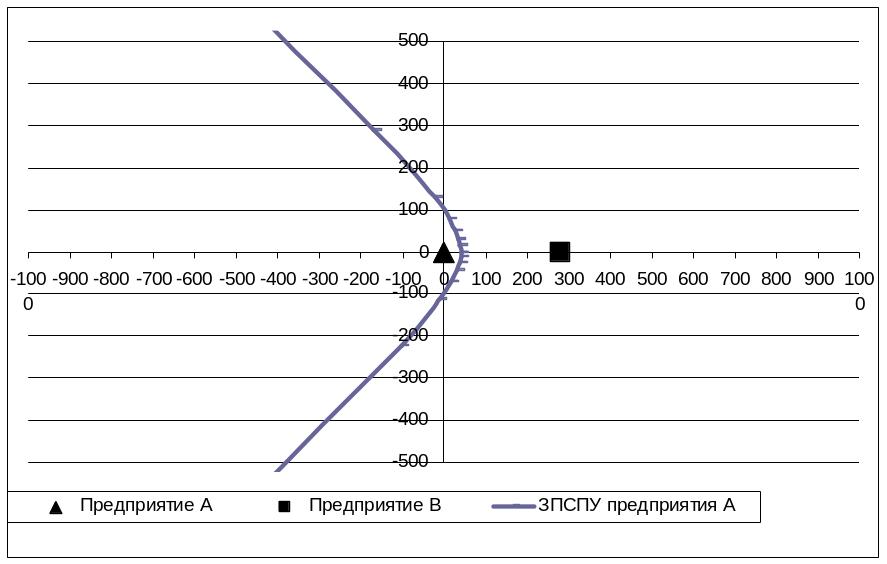
№2 СА≠СВ и рА=рВ=p |
CA˃CB |
|
(1)
|
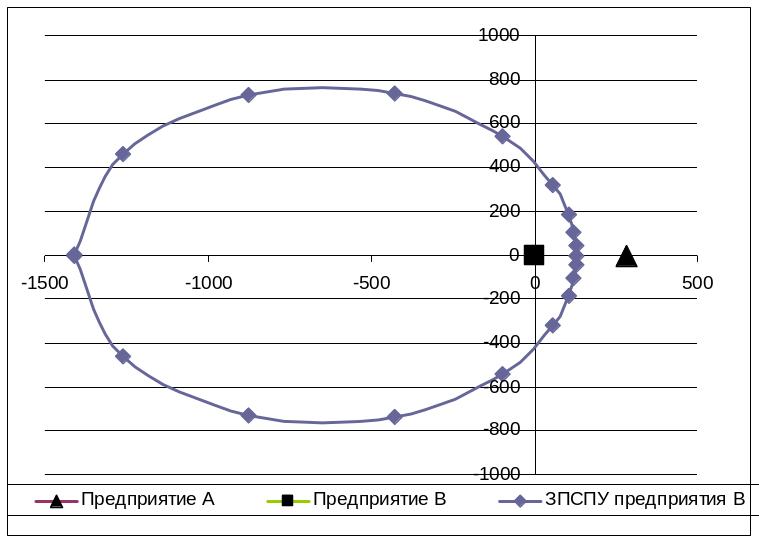
Координаты точек границы ЗПСПУ предприятия A гиперболически стремятся к линиям образующим с осью абсцисс углы равные соответственно арккосинусу (–G1/LAB) взятому с разными знаками; при этом lA стремится к бесконечности. Если не выполняется левая часть условия (2), то для предприятия A ЗПСПУ неограниченна. Если не выполняется правая часть условия (2), то для предприятия A ЗПСПУ не существует, т.е. ЗПСПУ предприятия B неограниченна. |
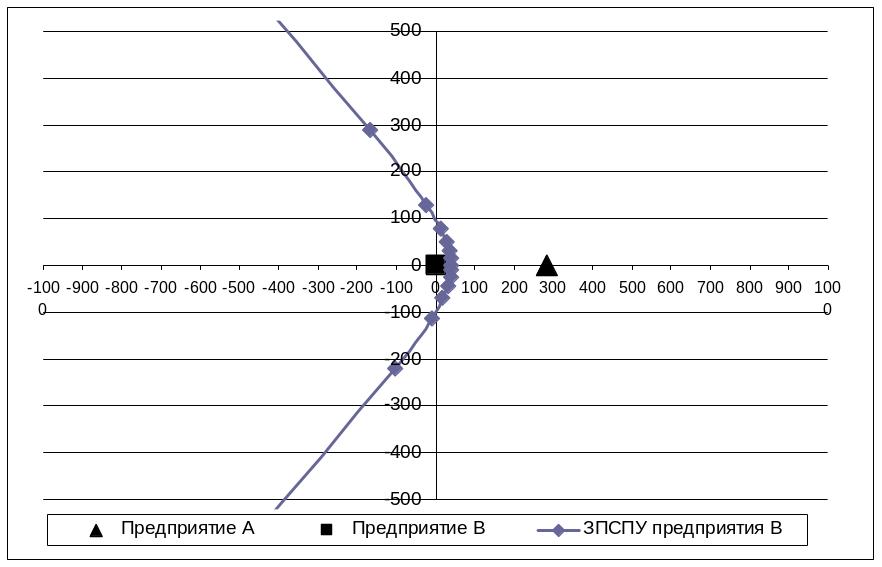
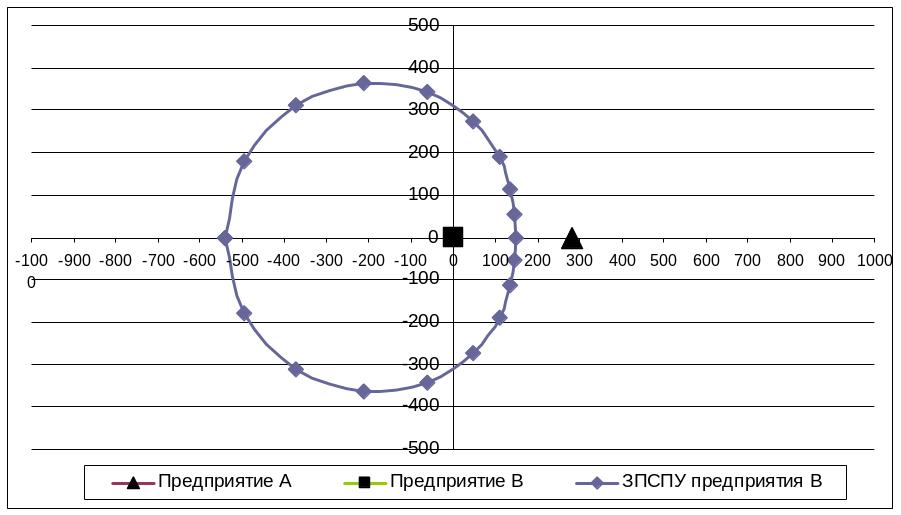
CA<CB |
|
(1)
|
Координаты точек границы ЗПСПУ предприятия B гиперболически стремятся к линиям образующим с осью абсцисс углы равные соответственно арккосинусу (G1/LAB) взятому с разными знаками; при этом lB стремится к бесконечности. Если не выполняется левая часть условия (2), то для предприятия B ЗПСПУ неограниченна. Если не выполняется правая часть условия (2), то для предприятия B ЗПСПУ не существует, т.е. ЗПСПУ предприятия A неограниченна. |
Продолжение табл. 3.1
1 |
2 |
3 |
4 |
5 |
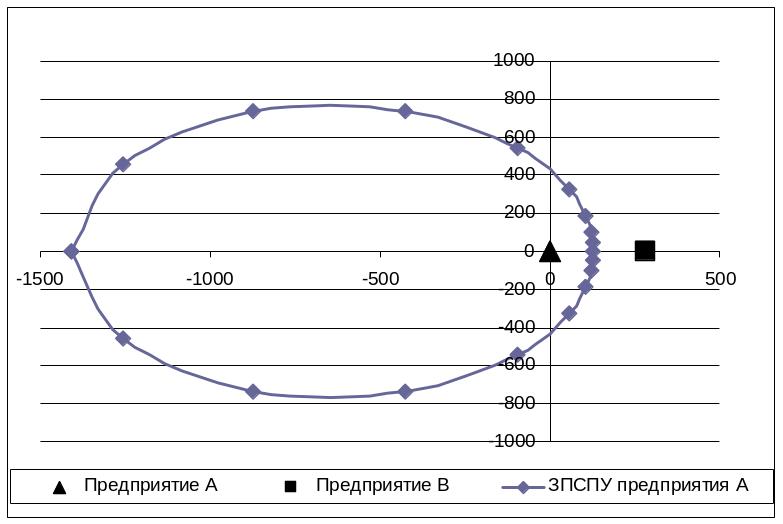
№3 СА=СВ=C и рА≠рВ |
рА > рВ |
|
|
Если неравенство (1) не выполняется, то необходимо построить ЗПСПУ предприятия B по формуле в следующей строке таблицы. Тогда ЗПСПУ предприятия A будет вся область вне построенной ЗПСПУ предприятия B. Если не выполняется условие (2), то для расчета необходимо использовать первую формулу из варианта комбинаций параметров №4. |
рА < рВ |
|
|
Если неравенство (1) не выполняется, то необходимо построить ЗПСПУ предприятия A по формуле в предыдущей строке таблицы. Тогда ЗПСПУ предприятия B будет вся область вне построенной ЗПСПУ предприятия A. Если не выполняется условие (2), то для расчета необходимо использовать вторую формулу из варианта комбинаций параметров №4. |
Окончание табл. 3.1
1 |
2 |
3 |
4 |
5 |
№4 СА≠СВ и рА≠рВ |
рА > рВ |
|
(1)
|
Если неравенство (1) не выполняется, то необходимо построить ЗПСПУ предприятия B по формуле в следующей строке таблицы. Тогда ЗПСПУ предприятия A будет вся область вне построенной ЗПСПУ предприятия B. Если не выполняется условие (2), то для предприятия A ЗПСПУ не существует, т.е. ЗПСПУ предприятия B неограниченна (предприятие B доминирует). |
рА < рВ |
|
(1)
|
Если неравенство (1) не выполняется, то необходимо построить ЗПСПУ предприятия A по формуле в предыдущей строке таблицы. Тогда ЗПСПУ предприятия B будет вся область вне построенной ЗПСПУ предприятия A. Если не выполняется условие (2), то для предприятия B ЗПСПУ не существует, т.е. ЗПСПУ предприятия A неограниченна (предприятие A доминирует). |

Таблица 3.2
Примеры конфигурации ЗПСПУ для двух конкурирующих предприятий
Вариант |
Подвариант |
Вид зоны |
№1 СА=СВ=C и рА=рB |
НЕТ |
|
№2 СА≠СВ и рА=рВ=p |
CA˃CB |
|
CA<CB |
|
Продолжение табл. 3.2
Вариант |
Подвариант |
Вид зоны |
№3 СА=СВ=C и рА≠рВ |
рА > рВ |
|
рА < рВ |
|
|
№4 СА≠СВ и рА≠рВ |
рА > рВ |
|
Окончание табл. 3.2
Вариант |
Подвариант |
Вид зоны |
№4 СА≠СВ и рА≠рВ |
рА < рВ |
|
Задание для самостоятельного выполнения:
Необходимо построить ЗАПСПУ, разделяющие зоны влияния компаний А и B, производящих одинаковую продукцию – «Х». Данные по расстоянию между городами (LAB), по заводской цене продукции компаний (СА и СВ), по тарифу на перевозку единицы груза от компаний А и В (рА и рВ , руб./км) приведены в таблице 3.3 ниже (по вариантам).
Таблица 3.3
Исходные данные для расчета ЗПСПУ
Вар. |
LAB |
СА |
СВ |
рА |
рВ |
1 |
282 |
600 |
500 |
0,5 |
0,5 |
2 |
950 |
600 |
600 |
0,6 |
0,4 |
3 |
560 |
600 |
750 |
0,4 |
0,7 |
4 |
375 |
450 |
700 |
0,7 |
0,7 |
5 |
55 |
150 |
150 |
0,15 |
0,2 |
6 |
700 |
250 |
400 |
0,85 |
0,5 |
7 |
750 |
250 |
500 |
0,9 |
0,9 |
8 |
128 |
230 |
240 |
0,12 |
0,2 |
9 |
350 |
370 |
610 |
0,4 |
0,15 |
10 |
400 |
800 |
650 |
0,5 |
0,5 |
11 |
2400 |
800 |
800 |
1,2 |
1 |
12 |
1300 |
350 |
400 |
0,15 |
0,55 |