

Способы построения схем автоматов
Цифровые автоматы могут быть реализованы тремя способами:
На элементах с жесткой логикой,
На постоянном запоминающем устройстве (микропрограммные автоматы)
На микропроцессорах или микроконтроллерах (программные автоматы).
1. Построение схем автоматов с жесткой логикой.
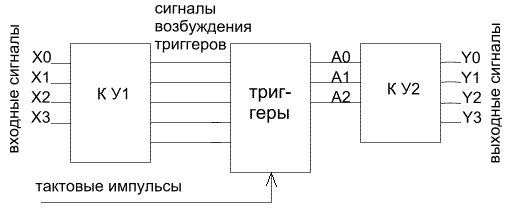
В управляющих автоматах на элементах с жесткой логикой для хранения информации о состоянии используется набор триггеров. На их тактовый вход подается тактирующий сигнал. Входные сигналы X подаются на комбинационные устройства КУ, вырабатывающие сигналы управления для триггеров. Выходные сигналы Y формируются из выходных сигналов триггеров A (для автомата Мили) или из выходных сигналов триггеров A и входных сигналов Y (для автомата Мура).
Блок-схема автомата Мура:
Подобный автомат реализуется схемой, процесс синтеза которой называется структурным синтезом. Процесс структурного синтеза автомата разделяется на следующие этапы:
выбор типа запоминающих и логических элементов;
кодирование состояний автомата;
синтез комбинационной схемы, формирующей сигналы возбуждения и выходные сигналы.
Задача синтеза автомата сводится к задаче синтеза комбинационной схемы путем построения системы булевых функций, выражающих зависимость выходных сигналов и сигналов возбуждения от входных сигналов и состояний автомата. Полученные булевы функции минимизируются (например, методом карт Карно) и используются в качестве формы для построения схемы автомата.
Достоинства и недостатки автоматов с жесткой логикой.
Такие схемы позволяют обеспечить наибольшее быстродействие из всех возможных методов построения цифрового автомата. Однако при возрастании сложности реализуемых алгоритмов схемы автоматов с жесткой логикой очень быстро становятся более сложными, чем схемы автоматов с микропрограммным или программным управлением. Поэтому схемы автоматов с жесткой логикой в настоящее время используют только в том случае, когда требуется максимальное быстродействие.
2. Построение схем автоматов с микропрограммной логикой
При построении управляющих автоматов с микропрограммной логикой основой такого автомата является постоянное запоминающее устройство (ПЗУ). Входные (адресные) сигналы для ПЗУ формируются из номера текущего состояния, хранимого в регистре и подаваемых на входы A4-A7, и комбинации входных сигналов X0-X3, подаваемых на входы A0-A3. В ячейке памяти с данным адресом в младших разрядах (D0-D2) хранится комбинация выходных сигналов Y0-Y2. В старших разрядах хранится адрес перехода к новому состоянию.
Микропрограммную реализацию автомата Мили. Здесь выходные сигналы являются функцией входных сигналов.

Достоинства и недостатки автоматов с микропрограммной логикой.
Достоинство: простота реализации и простота проектирования.
Недостатки: поскольку не все комбинации входных сигналов и номеров состояний (адресные сигналы ПЗУ) реализуются на практике, то не все ячейки ПЗУ используются. Также и с выходными сигналами. Зачастую количество их используемых комбинаций существенно меньше возможного количества линий, на которых формируются сигналы. Все это приводит к тому, что, либо приходится ставить преобразователи кодов на вход и выход автомата, а это ухудшает быстродействие схемы, либо использовать ПЗУ большого объема. Все это приводит к тому, что большую часть площади структуры современного микропроцессора занимает ПЗУ, в которой хранятся микропрограммы работы его блоков.
Автоматы с микропрограммной логикой следует использовать тогда, когда алгоритм работы слишком сложен для устройств с жесткой логикой.