

I этап. Цели моделирования.
На основе анализа индивидуальных биоритмов прогнозировать неблагоприятные дни, выбирать благоприятные дни для разного рода деятельности.
На основе анализа биоритмов двух человек проверить их физическую или эмоциональную или интеллектуальную совместимость.
II этап. Формализация задачи.
Объектом моделирования в этой задаче является любой человек или группа людей, для которых известна дата рождения.
Исходные данные: дата рождения, день отсчета, длительность прогноза.
Расчетные данные: количество прожитых дней.
Результаты: физический, эмоциональный, интеллектуальный биоритмы.
Задача: исследовать зависимость трех вышеуказанных характеристик от времени, принимая за минимум их значение, равное минус единице и за максимум – единице.
III этап. Построение математической модели.
Предположим, что состояния человека меняются по синусоидальному закону с периодом 23, 28 и 33 дня соответственно. Пусть x – количество прожитых человеком дней, тогда
физический цикл ФИЗ(x)=sin(2x/23); (1)
эмоциональный цикл ЭМО(x)=sin(2x/28); (2)
интеллектуальный цикл ИНТ(x)=sin(2x/33) (3)
IV этап. Выбор метода исследования.
Для моделирования выберем среду электронной таблицы. В этой среде математическая модель имеет вид формул, введенных в таблицу (Рис.1).
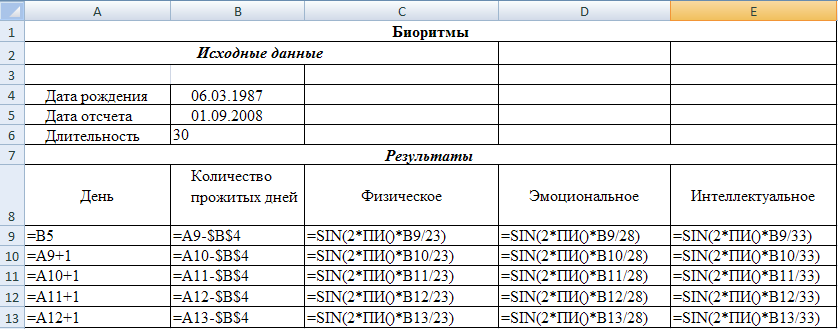
Рис.1 Фрагмент таблицы в режиме отображения формул

Р ис.2
Фрагмент таблицы в режиме отображения
значений
ис.2
Фрагмент таблицы в режиме отображения
значений
Рис.3.По результатам расчетов (рис.2.) построены графики
V этап. Проверка модели на адекватность
Проверим модель на адекватность, введя свою дату рождения и сопоставляя результаты моделирования и собственные ощущения на основе уже прожитого периода.
VI этап. Использование модели.
Определим свои благоприятные и неблагоприятные дни для разного рода деятельности на ближайший месяц.
Задание к лабораторной работе
Осуществить моделирование собственных биоритмов
Построить модель своей совместимости с другим человеком в одном из аспектов (физическом, эмоциональном или интеллектуальном)
Создать текстовый отчет по лабораторной работе, включающий:
постановку задачи и описание модели;
результаты тестирования программы;
результаты, полученные в ходе выполнения заданий (в различных формах);
качественный анализ результатов.
Лабораторная работа №2 Моделирование физических процессов в среде табличного процессора. Краткие теоретические сведения
Второй закон Ньютона. В рассматриваемых ниже математических моделях физических процессов фундаментальную роль играет второй закон Ньютона. Он гласит, что ускорение, с которым движется тело, прямо пропорционально действующей на него силе (если их несколько — то равнодействующей этих сил) и обратно пропорционально его массе:
 (1)
(1)
Свободное
падение тела. Математическая
модель свободного падения тела —
уравнение второго закона Ньютона с
учетом двух сил, действующих на тело —
силы тяжести и силы сопротивления среды.
Движение является одномерным; проецируя
силу тяжести
 ,
силу сопротивления
,
силу сопротивления
 ,
скорость
,
скорость
 и
перемещение
и
перемещение
 на ось, направленную вертикально вниз,
получаем :
на ось, направленную вертикально вниз,
получаем :
 (2)
(2)
Сила
сопротивления имеет две составляющие:
 .
.
Коэффициенты и
и
 определяется свойствами среды и формой
тела. Например, для шара
определяется свойствами среды и формой
тела. Например, для шара
 — так называемая формула Стокса, где
— так называемая формула Стокса, где
 — динамическая вязкость среды,
— динамическая вязкость среды,
 —
радиус шара. Обычно принимают
—
радиус шара. Обычно принимают
 ,
где S
- площадь сечения тела, поперечного по
отношению к потоку,
,
где S
- площадь сечения тела, поперечного по
отношению к потоку,
 - плотность среды, c
— безразмерный коэффициент лобового
сопротивления (см. рис. 1). В конкретных
задачах можно одной из составляющих
силы сопротивления пренебречь (если
она значительно меньше другой).
- плотность среды, c
— безразмерный коэффициент лобового
сопротивления (см. рис. 1). В конкретных
задачах можно одной из составляющих
силы сопротивления пренебречь (если
она значительно меньше другой).
|
Диск
Полусфера
Шар
«Каплевидное» тело |
c=1,11
c=0,55
c=0,4
c=0,045 |
Рис. 1. Значения коэффициента лобового сопротивления для некоторых тел, поперечное сечение которых имеет указанную на рисунке форму
Взлет ракеты. Исследуем ситуацию, когда масса тела не является величиной постоянной. Запишем второй закон Ньютона в более общей математической форме.
Построим простейшую модель вертикального взлета ракеты, приняв следующие гипотезы:
масса ракеты уменьшается во время взлета по линейному закону:
 , (3)
, (3)
где m0 начальная масса ракеты, заправленной топливом; mкон остаточная масса после полного выгорания топлива; расход топлива;
Сила тяги двигателя постоянна на всем участке взлета.
плотность воздуха , входящая в коэффициент k2, убывает по мере подъема ракеты по закону = 0 . 10h, где h высота, 5,6 . 105 м1 .
Таким образом, модель будет описываться системой двух дифференциальных уравнений для функций v(t) и h(t):
 (4)
(4)
Движение тела, брошенного под углом к горизонту. Дифференциальные уравнения модели получаются из второго закона Ньютона проецированием скорости и перемещения на горизонтальную и вертикальную оси координат:
 (5)
(5)
Здесь m масса тела; v x=vcos ,vy=vsin - величины проекций начальной скорости v на горизонтальную и вертикальную оси; угол начального наклона вектора скорости к горизонту; k1 и k2 – коэффициенты, входящие в в формулу силы сопротивления.
Движение небесных тел. Рассмотрим модель движения космического тела (планеты, кометы, спутника) под действием силы всемирного тяготения в гравитационном поле, создаваемом телом с многократно большей массой.
Примем следующие предположения: «большое» тело находится в начале системы координат, другие тела на движение «малого» тела влияния не оказывают. Дифференциальные уравнения модели имеют вид
 , (6)
, (6)
где M- масса «большого» тела; x, y - координаты «малого» тела, движение которого изучается; vx, vy – величины проекций скорости «малого» тела на горизонтальную и вертикальную оси, G = 6,67. 1011 м3/кг с2 гравитационная постоянная .
Обезразмеривание.
В задаче о движении небесных тел особенно
неудобно работать с размерными величинами,
измеряемыми миллиардами километров,
секунд и т.д. В качестве величин для
обезразмеривания удобно принять
характерное расстояние от Земли до
Солнца ρ
= 1,496∙1011
м, (так называемая астрономическая
единица), период круговой орбиты
 ,
соответствующий
этому расстоянию, скорость движения по
ней
,
соответствующий
этому расстоянию, скорость движения по
ней
 ,
т.е. принять
,
т.е. принять

После обезразмеривания получаем
 (7)
(7)
В безразмерных переменных уравнения вообще не содержат параметров. Единственное, что отличает разные режимы движения друг от друга – это начальные условия.
Движение заряженных частиц. Рассмотрим модель движения заряженной частицы в кулоновском поле другой заряженной частицы, положение которой фиксировано.
В системе координат, начало которой привязано к «большому» телу, дифференциальные уравнения модели имеют вид
 (8)
(8)
Они
получаются из второго закона Ньютона
и закона Кулона.
 = 0,85 .
1012
ф/м
электрическая постоянная. Знак “”
в двух последних уравнениях соответствует
разноименно заряженным частицам; в
случае одноименных зарядов он меняется
на “+”.
Здесь q
и Q
соответственно заряды движущейся и
закрепленной частиц; m
масса движущейся частицы; x
и
y
- координаты
движущейся частицы;
v
x
, vy-
величины
проекций скорости v
движущейся частицы.на горизонтальную
и вертикальную оси;
= 0,85 .
1012
ф/м
электрическая постоянная. Знак “”
в двух последних уравнениях соответствует
разноименно заряженным частицам; в
случае одноименных зарядов он меняется
на “+”.
Здесь q
и Q
соответственно заряды движущейся и
закрепленной частиц; m
масса движущейся частицы; x
и
y
- координаты
движущейся частицы;
v
x
, vy-
величины
проекций скорости v
движущейся частицы.на горизонтальную
и вертикальную оси;
Метод
Эйлера решения обыкновенных дифференциальных
уравнений.
Рассмотрим задачу Коши: Найти решение
 дифференциального
уравнения
дифференциального
уравнения
 для
для
 при
начальном условии
при
начальном условии
 .
Для численного решения уравнения
проведем дискретизацию следующим
простейшим способом: заменим непрерывные
промежутки изменения t
и y
дискретными
множествами значений, непрерывные
функции –дискретными, производную –
конечноразностным отношением. Получим
:
.
Для численного решения уравнения
проведем дискретизацию следующим
простейшим способом: заменим непрерывные
промежутки изменения t
и y
дискретными
множествами значений, непрерывные
функции –дискретными, производную –
конечноразностным отношением. Получим
:
 откуда
получаем разностную схему Эйлера:
откуда
получаем разностную схему Эйлера:
 (9)
(9)
Здесь
отрезок
 разбит на n
равных частей длиной
разбит на n
равных частей длиной
 ,
так что
,
так что
 .
.
Вопрос о выборе конкретного значения весьма непрост и определяется следующими соображениями. При компьютерном моделировании можно получить решение задачи о движении тела на некотором дискретном множестве значений t0, t0+ t, …, t0+(n-1)t. Чем больше величина t, тем меньшая точность в передаче значений непрерывных функций их дискретными представлениями. Однако, уменьшение шага t не всегда ведет к улучшению результатов моделирования. Одна из причин заключается в том, что чем меньше шаг, тем больше арифметических действий, ведущих к увеличению глобальной погрешности округления. Более эффективными при моделировании процессов, описываемых дифференциальными уравнениями, являются методы Эйлера-Коши или Рунге-Кутта более высокого порядка аппроксимации, чем метод Эйлера.