

1.2.2 Описание структурной схемы сар

Рис. 2.4 – Структурная схема САР (без корректирующих звеньев)
Pn, PT – регуляторы частоты вращения и температуры соответственно;
Сел. min – селектор минимума;
ИУ – исполнительное устройство;
ГТД – газотурбинный двигатель;
Иn, ИT – измерители частоты вращения и температуры газа соответственно
Структурную схему САР на рис.2.4 можно представить в виде рис.2.5, где:
а0 = Wn(p)Un0 - WT(p)UT0;
b0 = WT(p)UT0; (2.6)
A(p) =Wn(p)Hn(p) - WT(p)HT(p);
B(p) = WT (p)HT(p).
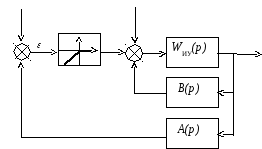
Рис. 2.5 – Структурная схема САР
При выполнении условия (2.5) структурная схема САР принимает вид рис.2.6.
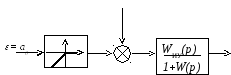
Рис. 2.6 – Структурная схема САР
Существенным недостатком рассмотренной САР является низкая динамическая точность и заброс по температуре газа. Это можно объяснить следующим образом.
ГТД имеет различные динамические характеристики по выходным параметрам относительно расхода топлива, а именно:
–по частоте вращения ротора
![]() ; (2.7)
; (2.7)
–по температуре газа за турбиной
![]() , (2.8)
, (2.8)
где
![]() -
коэффициент передачи по n;
-
коэффициент передачи по n;
![]() -
коэффициент передачи по T4*;
-
коэффициент передачи по T4*;
A(p), B(p), D(p) - полиномы, зависящие от конструктивных особенностей ГТД.
Порядок полинома А(p) на единицу меньше порядка полинома D(p), а порядок полинома B(p) равен порядку полинома D(p). Следовательно, как видно из передаточных функций Hn(p) и HT(p) газотурбинный двигатель является инерционным звеном по частоте вращения и практически безинерционным по температуре газа.
Передаточная функция исполнительного устройства:
![]() , (2.9)
, (2.9)
где КИУ - коэффициент передачи ИУ;
ТИУ- постоянная времени ИУ, то есть, исполнительное устройство является изодромным звеном.
При этом:
![]() ; (2.10)
; (2.10)
 , (2.11)
, (2.11)
где К1 - коэффициент передачи цепи: исполнительное устройство - ГТД по частоте вращения ротора;
К2 - коэффициент передачи цепи: исполнительное устройство - ГТД по температуре газа;
Т2 - постоянная времени цепи: исполнительное устройство - ГТД по температуре газа.
Для получения необходимого качества регулирования частоты вращения и температуры газа, регуляторы этих параметров должны иметь следующие передаточные функции:
–регулятора частоты вращения ротора ГТД:
Wn(p)=Kn , (2.12)
–регулятора температуры газа:
![]() , (2.13)
, (2.13)
где Kn - коэффициент передачи регулятора частоты вращения;
KT - коэффициент передачи регулятора температуры газа;
TT = T2 - постоянная времени регулятора температуры газа.
Если передаточные функции измерителей параметров WИn(p)=WИT=1, тогда передаточные функции отдельных разомкнутых каналов WI(p) и WII(p) имеют вид:
![]() ; (2.14)
; (2.14)
![]() , (2.15)
, (2.15)
где K=KnK1=KTK2 - коэффициент передачи отдельного разомкнутого канала.
Для получения необходимого качества регулирования переключение селектора должно происходить в момент равенства рассогласований между текущими значениями параметров и задающими воздействиями каналов /12/, то есть сигналов перед регуляторами. Из анализа видно, что регулятор температуры газа является инерционным по отношению к регулятору частоты вращения ротора ГТД, поэтому селектор переключается с запаздыванием. В результате происходит заброс по температуре газа.
Поясним сказанное на примере. Рассмотрим переключение САР с канала частоты вращения на канал температуры газа.
Пусть Un0=at;
UТ0=С=const; ![]() ; HT(p)=1;
; HT(p)=1; ![]() .
.
Тогда
Wn
(p)=1;
![]() .
.
Согласно рисунку 2.6:
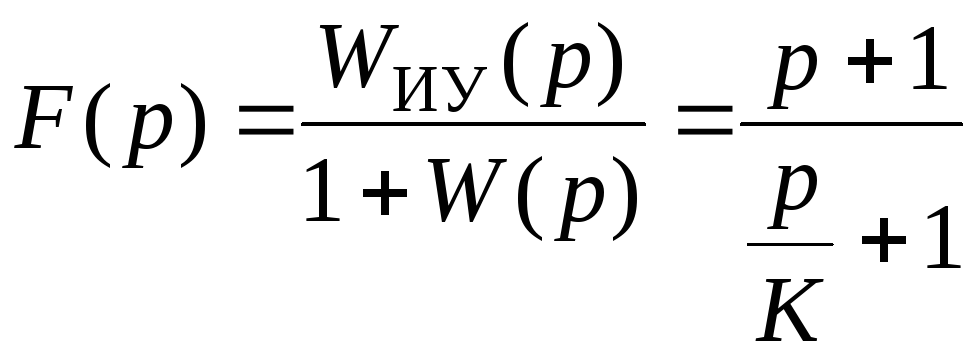 . (2.16)
. (2.16)
Условие селектирования: Un = UТ, то есть Wn(p)Un0 = WT (p)UТ0 или at=c.
Следовательно:
![]()
Изменение UТ до селектирования:
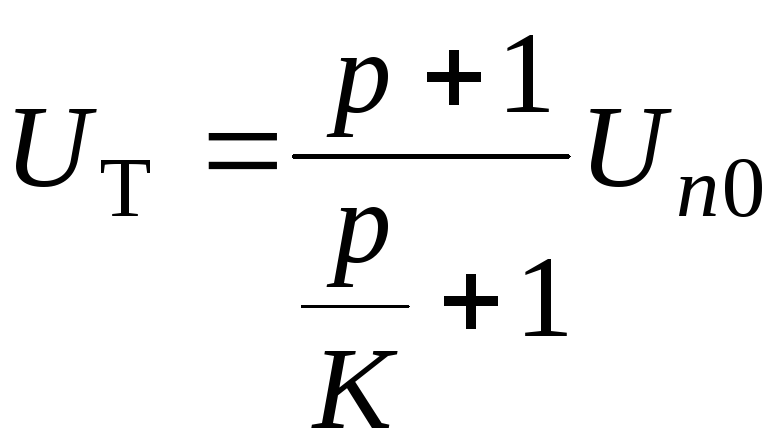 . (2.17)
. (2.17)
Изменение UТ после селектирования:
 . (2.18)
. (2.18)

Рис. 2.7
Поведение UТ, а следовательно, и Т4* представлено на рис. 2.7. Как видно из рисунка данная САР имеет низкую динамическую точность и заброс по температуре газа за турбиной Т4*. Для устранения этого недостатка, который заметно снижает ресурс ГТД, в структурную схему САР ГТД (рис. 2.1) необходимо ввести корректирующие цепи, обеспечивающие более раннее переключение селектора на канал температуры и устранение заброса.
Структурная схема САР (с корректирующими звеньями)
Усовершенствованный вариант САР ГТД представлен на рис. 2.8. Устранение заброса по температуре газа в данной САР осуществляется путем коррекции задающего воздействия, поступающего на вход регулятора температуры, причем эта коррекция осуществляется только при работе САР в режиме регулирования частоты вращения, а в режиме регулирования температуры газа она выключается, не нарушая тем самым работу регулятора.
Структурная схема САР ГТД, приведенная на рис. 2.8, соответствует формуле полезной модели. Система автоматического регулирования газотурбинного двигателя, содержащая последовательно соединенные измеритель частоты вращения ротора газотурбинного двигателя, первый элемент сравнения, регулятор частоты вращения ротора газотурбинного двигателя, селектор минимума, исполнительное устройство и газотурбинный двигатель, причем газотурбинный двигатель соединен с измерителем частоты вращения ротора газотурбинного двигателя и измерителем температуры газов, выход которого подключен к первому входу второго элемента сравнения, регулятор температуры газов, выход которого соединен со вторым входом селектора минимума, причем ко второму входу первого элемента сравнения подключен задатчик частоты вращения ротора газотурбинного двигателя, ко второму входу второго элемента сравнения подключен задатчик температуры газов, отличающаяся тем, что система дополнительно содержит два корректирующих звена, два суммирующих элемента, компаратор и ключ, причем входы первого и второго корректирующих звеньев подключены к выходам соответственно первого и второго элементов сравнения, а выходы – к входам первого суммирующего элемента, входы компаратора подключены к выходам регуляторов частоты вращения ротора газотурбинного двигателя и температуры газов, а выход соединен с первым входом ключа, второй вход которого соединен с выходом первого суммирующего элемента, а выход с первым входом второго суммирующего элемента, второй вход которого связан с выходом второго элемента сравнения, а выход – с входом регулятора температуры газов.

Рис.2.8 – Структурная схема САР (с корректирующими звеньями).
Pn, PT – регуляторы частоты вращения и температуры соответственно;
Сел. min – селектор минимума;
ИУ – исполнительное устройство;
ГТД – газотурбинный двигатель;
Иn, ИT – измерители частоты вращения и температуры газа соответственно;
КЗ1, КЗ2 – корректирующие звенья;
Кл – ключ;
К – компаратор.
САР работает следующим образом: в канале частоты вращения ротора ГТД сигнал с измерителя частоты вращения Un, пропорциональный n, поступает на сравнивающее устройство, где сравнивается с заданным значением Un0 и формируется выходной сигнал рассогласования Еn, пропорциональный отклонению частоты n вращения ротора ГТД от заданного значения. Этот сигнал поступает на вход регулятора частоты вращения Рn, формирующего управляющий сигнал U1, который через селектор минимума Сел. min поступает на исполнительное устройство, управляющее расходом топлива GT ГТД.
В канале температуры газа Т4* за турбиной ГТД сигнал UТ, пропорциональный среднему значению температуры газа за турбиной Т4* ГТД также поступает на вход сравнивающего устройства, где сравнивается с заданным значением температуры газа UТ0 и формируется сигнал рассогласования ЕT, пропорциональный отклонению температуры газа Т4* от заданного значения. Этот сигнал складывается с сигналом коррекции и поступает на регулятор температуры газа РТ, который вырабатывает управляющий сигнал U2, поступающий на второй вход селектора минимума. На выход селектора поступает сигнал с того регулятора, который по условиям работы ГТД требует меньшего расхода топлива GT. Этот сигнал воздействует на исполнительное устройство ИУ, которое в свою очередь управляет расходом топлива GT ГТД.
Одновременно сигналы рассогласования Еn и ЕT поступают на корректирующие звенья КЗ1 и КЗ2 каналов частоты вращения и температуры газа, соответственно, после чего сумматор на выходе этих звеньев складывает их сигналы, формируя тем самым сигнал коррекции задающего воздействия. Этот сигнал уменьшает задающее воздействие Т4* и таким образом обеспечивает более раннее включение в работу канала температуры, ликвидируя заброс по температуре газа.
Сигнал коррекции задающего воздействия поступает только при работе САР в режиме регулирования n, что обеспечивается ключом Кл, который управляется коммутатором К , открывая ключ только тогда, когда сигнал с регулятора Т4* больше, чем с регулятора n. После переключения САР в режим регулирования Т4* ключ К закрывается и сигнал коррекции на регулятор не оказывает никакого воздействия.
Переключение селектора минимума осуществляется при условии:
Un=UТ. (2.19)
Чтобы при селектировании выполнялось условие:
Еn=ЕТ (2.20)
необходимые передаточные функции корректирующих звеньев получим следующим образом:
U1=Wn(p)Еn; (2.21)
U2=WT(p)ET + WK1(p)WТ(p)En + WK2(p)WТ(p)ET. (2.22)
Из условия селектирования (2.19) имеем:
Wn(p)En=WT(p)ET + WK1(p)WТ En + WK2(p)WT(p)ET (2.23)
или
Wn(p)En – WK1(p)WТ(p)En=WT(p)ET + WK2(p)WTET. (2.24)
Если принять, что
Wn(p) – WK1(p)WТ(p)=1 (2.25)
и
WT(p) + WK2(p)WT(p)=1, (2.26)
то условие селектирования получаем в виде (2.20). При этом передаточные функции корректирующих звеньев имеют следующий вид:
![]() ; (2.27)
; (2.27)
![]() . (2.28)
. (2.28)
С помощью таких корректирующих звеньев можно улучшить динамическую точность и устранить заброс по температуре газа за турбиной Т4*.