

1.1.4 Системы с селектированием каналов управления, воздействующих на один регулирующий фактор
Для устранения отрицательного влияния взаимодействия регуляторов на характеристики системы регулирования с одним регулирующим фактором в современных CAP ГТД применяют специальные устройства — селекторы сигналов, позволяющие исключить зону совместной работы каналов управления. Селекторы обеспечивают во всех условиях работы системы воздействие на регулирующий фактор только одного регулятора, включаемого в работу в зависимости от режима работы двигателя. В этом случае каждый из каналов управления работает автономно, и его параметры могут выбираться без учета взаимодействия с другими регуляторами. Обычно применяется принцип селектирования, согласно которому регулируется параметр двигателя, наиболее приблизившийся к величине, определяемой установкой регулятора (программой регулирования). Например, при управлении ГТД путем изменений расхода топлива в основную камеру сгорания на максимальных режимах работы двигателя для того, чтобы все регулируемые параметры не превысили максимальных допустимых значений (ограничение сверху), селектор должен пропустить на управление дозирующим устройством сигнал, соответствующий получению минимальной величины GТ. Классифицируя по требуемой величине регулирующего фактора, такое селектирование называют селектированием по минимуму, а селектор — селектором минимальных сигналов управления (селектор «min»). С помощью селектирования по минимуму определяется очередность выполнения программ регулирования nmax=const, Tmax=const, pкmax=const, программы регулирования при приемистости и ряда других. Если же ограничивают минимальные значения параметров (ограничение снизу), то предпочтение отдается регулятору параметра, для поддержания которого требуется наибольший расход топлива, т. е. осуществляется селектирование по максимуму (селектор «max»). Такой принцип применяется для согласования с регуляторами сброса газа, ограничения снизу расхода топлива. Применяя последовательное селектирование по минимуму и максимуму, можно обеспечить необходимое ограничение величин регулируемых параметров сверху и снизу. Структурная схема регулятора основного контура двухвального ТРДДФ с последовательным селектированием сигналов управления показана на рис.1.11.
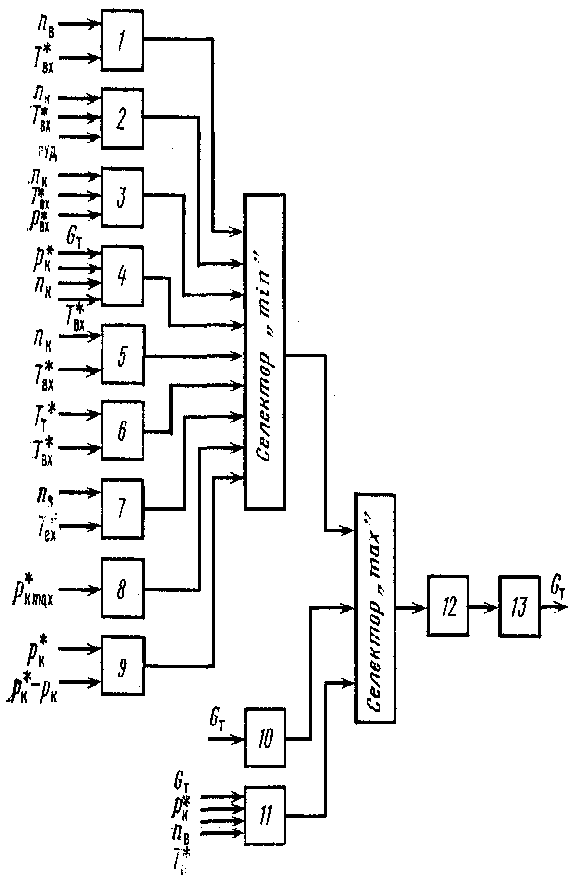
Рис. 1.11 – Схема последовательного селектирования сигналов:
1, 2 – регулирование nв max и nк;
3 – регулирование на режиме МГ;
4 – регулирование приёмистости и запуска;
5, 6, 7, 8 – ограничители nк max, Т Тmax, nв.пр max, p* к max
9 – управление GТ для защиты от помпажа;
10 – ограничение GТ min;
11 – регулирование при сбросе газа;
12 – исполнительный механизм;
13 – дозирующее устройство.
Применение селекторов, устраняющих зону совместной работы, позволяет сохранить статическую точность и запасы устойчивости регулирования, свойственные автономным регуляторам параметров. Взаимодействие каналов управления при этом сохраняется на переходных режимах, характер которых зависит от программ регулирования, способов селектирования и динамических свойств регуляторов.
Возможные схемы устройств для селектирования каналов управления в гидромеханических регуляторах ГТД показаны на рис. 1.12.

Рис.1.12 – Схемы устройств для селектирования каналов управления:
а—селектор «min» со следящими сервопоршнями;
б—золотниковый селектор «min»;
в—золотниковый селектор «min» с усилителем;
г—золотниковый селектор «max».
Здесь схемы а, б, в служат для селектирования по минимуму, а схема г—по максимуму. На схеме а показано устройство со следящими астатическими сервопоршнями 1 и 2, где поршень 1 является исполнительным механизмом регуляторов двух параметров Х и Y. При работе одного из каналов управления, приводящей к движению связанного с ним сервопоршня, второй сервопоршень отслеживает его перемещение. Управление регулирующим фактором осуществляется в зависимости от положения того поршня, канал управления которым достиг положения, соответствующего равновесному режиму работы канала. Схема б относится к золотниковому селектору двух сигналов управления, схема в отличается от нее наличием усилителя в одном из каналов управления, схема г позволяет осуществить селектирование по максимуму. Селектирование в таких устройствах обеспечивается перемещением золотника, управляемого клапанами, который производит переключение каналов управления. Если при этом конструктивные параметры золотника выбрать так, что один из регуляторов не может быть соединен с исполнительным механизмом до тех пор, пока второй не будет полностью отключен, то зона совместной работы регуляторов устраняется.
Отметим, что место селектирования сигналов управления в CAP определяется и требованиями к динамическим характеристикам системы, возможностями ее конструктивного исполнения. Например, в схеме на рис. 1.2, если осуществить селектирование перед статической приставкой, то воздействие по производной будет осуществляться во всех каналах регулирования.
Особенности выбора статических характеристик гидромеханических селектирующих устройств
В случае применения данного устройства (рис. 1.13) в CAP двухвального ТРДД для согласования электронного регулятора частоты вращения nв и гидромеханического регулятора-ограничителя частоты вращения nк, воздействующих на расход топлива в камеру сгорания. Схема регулятора приведена на рис. 1.13.
Электронный регулятор действует на селектирующее устройство через исполнительный механизм ИМЭ, преобразующий с помощью усилителя 1 электрический сигнал q в давление РМЭ рабочей жидкости в пружинной полости 2 селектора 3. Сигнал рассогласования частоты вращения nк характеризуется давлением Рк в маятниковой полости 4.
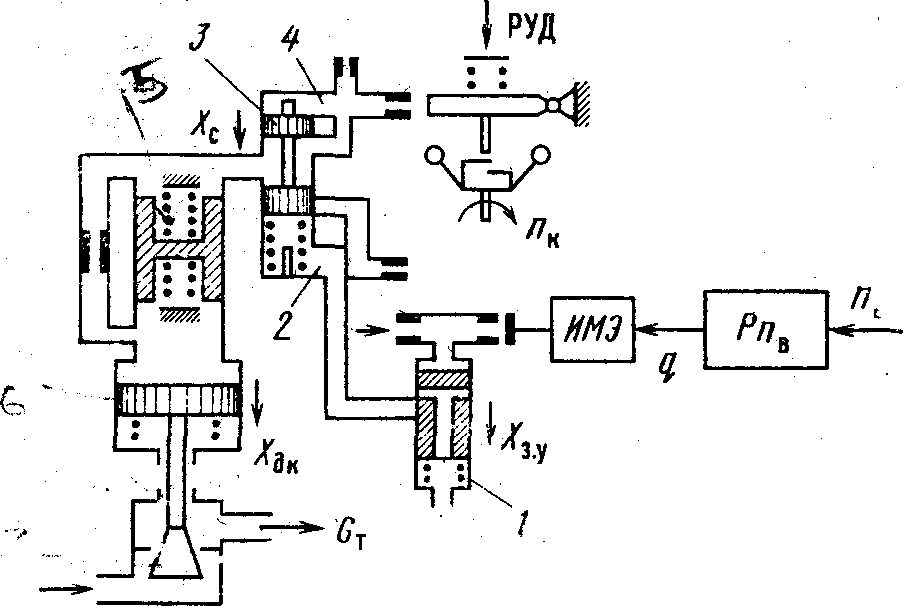
Рис. 1.13 – Схема регулятора с селектирующим устройством:
Pnв – Электронный регулятор частоты вращения nв;
ИМЭ – исполнительный механизм электронного регулятора.
Принятые положительные направления перемещений золотников селектора (Xc), усилителя (Xз.у) и поршня исполнительного механизма (Xд.к) отмечены на рисунке стрелками. При управлении от гидромеханического датчика частоты вращения (Хс=0) управляющим является давление Рм, а при управлении от электронного регулятора (Хс=Xcmах)—давление Рмэ. Пусть желаемые статические характеристики селектирующего устройства, характеристика переключения Xc(q) и характеристика усилителя Рмэ (q) имеют такой вид, как показано на рис. 1.14. Здесь отмечены величины, соответствующие началу (qн) и концу (qк) диапазона пропорционального регулирования параметра nв, переключению селектора (qп) и равновесному режиму работы (qо) канала регулирования параметра nв.
Примечание. Ниже используются индексы: 0—на равновесном режиме; п—в момент переключения селектора; н—начало открытия отверстий в золотнике усилителя; к—полное открытие отверстий в золотнике усилителя.
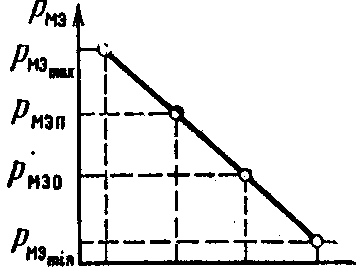
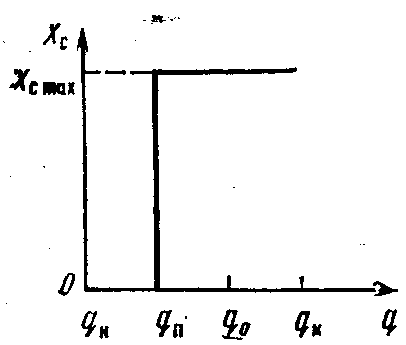
Рис. 1.14 – Статические характеристики селектирующего устройства.
Положение золотника Хс определяется конструктивными параметрами селектора и перепадом давлений Рм—Рмэ. Величина Рм в соответствии с характеристикой тахометра связана с частотой nк и уставкой nкуст причем в момент переключения селектора nк соответствует уставке nвуст Можно показать, что величина Рмэп давления Рмэ , необходимого для переключения селектора, зависит от конструктивных параметров усилителя и величин qн, qк, qo, qп. Если не изменять параметры, влияющие на характеристики других узлов регулятора, то заданные величины qн, qк, qo и qп могут быть получены выбором параметров fз, Хз.у.к, Xз.y.н, Rco, Cc, Fc и формы отверстий в золотнике усилителя, определяемой зависимостью fз.у(Хз.у). Здесь fз—площадь проходного сечения дросселя питания в полости над золотником усилителя; Rco, Cc—усилие затяжки и жесткость пружины под золотником селектора; Fc—поршневая площадь золотника селектора.
Проанализируем связь некоторых из этих параметров с величинами qн, qк, qп и возможности получения необходимых характеристик переключения и характеристики усилителя. Будем далее полагать qo=0,5.
Из условия Rзу>0, определяющего минимальную величину предварительной затяжки пружины под золотником усилителя, можно получить, что площадь fз должна быть не меньше величины f3min, зависящей от параметров Хз.у.н, Хз.у.к, qн, qк.
Существует некоторое минимальное значение (qп=qпmin, при котором еще возможно переключение селектора (очевидно, что максимальное значение qп равно qo) На рис. 1.15 приведены зависимости Рмэп(qп), построенные для круглых отверстий в золотнике усилителя. Если, например, выбрано fз/fзmin=4: и максимальная величина Рмэп равна 20 кг/см2, то согласно рис.1.15, а, имеем qпmin=0,18. Увеличение fз приводит к уменьшению (qпmin, но вместе с тем, при fз>4fзmin влияние fз становится незначительным).
Рис. 1.15 – Зависимости рМЭП(qП) (а—для qН=0, qК=1)
Влияние на величину qпmin диапазона qн, qк пропорциональности статической характеристики усилителя видно из рис. 1.15, б. Из графиков следует, что диапазон реализуемых величин qп мало зависит от величины qк при qн=const.
Можно показать, что при заданных qн и qк, изменяя только размер и число отверстий в золотнике усилителя при неизменной их форме, уменьшить величину qпmin не удается. При необходимости уменьшения qпmin нужно специально выбирать закон изменения площади fз.у(Хз.у). При этом важно определить четыре характерные точки зависимости fз.у(Хз.у) для Хз.у.н, Хз.у.к Хз.у.0, Хз.у.п. На рис.1.16 в качестве примера приведены зависимости fз.у(Хз.у) для разных значений qп, которые достигаются при давлении Рмэп=18,5 кг/см2. При таком давлении Рмэп для круглых отверстий qпmin=0,22 (см. рис.1.15,а). Зависимость fз.у(Хз.у) для круглых отверстий показана на рис. 1.16 пунктиром.
Таким образом, выбором конструктивных параметров усилителя можно сформировать требуемые характеристику переключения и диапазон пропорционального регулирования параметра nв.
На
статическую характеристику селектора
влияет скорость движения поршня
исполнительного механизма. При
переключении селектора, когда Рмэ=Рмэп,
исполнительный механизм движется в
направлении увеличения расхода топлива
 .
Движение поршня приводит к тому, что
давление в маятниковой полости (или в
полости под золотником селектора) будет
меньше, чем при неподвижном исполнительном
механизме. В результате передача
управления от гидромеханического
регулятора к электронному произойдет
при сигнале qп1
большем величины qп,
соответствующей. случаю
.
Движение поршня приводит к тому, что
давление в маятниковой полости (или в
полости под золотником селектора) будет
меньше, чем при неподвижном исполнительном
механизме. В результате передача
управления от гидромеханического
регулятора к электронному произойдет
при сигнале qп1
большем величины qп,
соответствующей. случаю
![]() ,
а при обратном переключении селектора—при
qп2<qп.
Такое смещение точек переключения
селектора при движущемся поршне
исполнительного механизма приводит к
появлению гистерезиса q=qп1-qп2
на характеристике Xc(q).
Величина гистерезиса зависит от уставок
регуляторов nв.уст
и nк.уст.
Характеристика переключения селектора,
построенная с учетом движения поршня
исполнительного механизма, показана
на рис. 1.17.
,
а при обратном переключении селектора—при
qп2<qп.
Такое смещение точек переключения
селектора при движущемся поршне
исполнительного механизма приводит к
появлению гистерезиса q=qп1-qп2
на характеристике Xc(q).
Величина гистерезиса зависит от уставок
регуляторов nв.уст
и nк.уст.
Характеристика переключения селектора,
построенная с учетом движения поршня
исполнительного механизма, показана
на рис. 1.17.
Здесь программы регулирования параметров nв и nк таковы, что режиму работы двигателя при nв=nв.уст соответствует величина nк=0,95nк.уст. Величина гистерезиса на приведенной характеристике составляет около 2,5%.
Выходной сигнал электронного регулятора q может быть не непрерывным, а, например, с широтно-импульсной модуляцией (ШИМ). В этом случае q—коэффициент заполнения импульсов.
В системе с таким управляющим сигналом на характеристике переключения, появляется область (заштрихованная на рис. 1.17), внутри которой происходят колебания золотника селектора с амплитудой, достигающей его полного хода (здесь период колебаний сигнала ШИМ 0,025с). Область с одинарной штриховкой соответствует колебаниям золотника при передаче управления от гидромеханического регулятора к электронному, а область с двойной штриховкой—обратной передаче управления. Вне областей переключения зависимости Хс(q) не отличаются от полученных для непрерывного сигнала q.
Рис. 1.16 – Зависимости fз.у(Хз.у) (для qн=0, qк=1).
Рис. 1.17 – Характеристики переключения селектора.
Селекторы сигналов в аналоговых электронных системах регулирования
Известны разные способы выполнения селектирующих устройств в аналоговых электронных регуляторах. Например, возможны схемы переключения каналов с помощью релейных устройств или путем введения преобладающих сигналов из каналов ограничения. Однако лучшие характеристики (точность, надежность) ,позволяет получить селектирование сигналов по их уровню, которое может быть осуществлено применением диодных схем (рис. 1.18).
В схеме а, являющейся селектором минимальных значений, выходной сигнал Uвых определяется соотношением Uвых=min(U1, U2, U3), а в схеме б (селектор максимальных значений) — соотношением Uвых=max(U1, U2, U3).

Рис. 1.18 – Диодные селекторы:
а—селектор «min»;
б—селектор «max»;
в—селектор «max» с предварительным усилением
Недостатками диодных селекторов, выполненных по схемам а и б, являются снижение точности и появление зоны совместной работы регуляторов при малых уровнях сигналов на входе, сравнимых по величине с контактной разностью потенциалов полупроводниковых диодов. Эти недостатки позволяет устранить схема в, в которой осуществляется предварительное усиление селектируемых сигналов с помощью операционных усилителей.