

АННОТАЦИЯ
В дипломной работе проводятся структурные преобразования системы автоматического управления с селектором. Проанализирована устойчивость эквивалентной одноканальной нелинейной системы с нелинейностью типа «модуль». Приводятся условия существования незатухающих колебаний и результаты и результаты моделирования САУ с селектором.
ВВЕДЕНИЕ
Анализ и синтез линейных многосвязных систем автоматического управления (САУ) объектами, для которых число m равно числу управляющих координат n, могут быть проведены с помощью аппарата матричной алгебры. Однако, для большинства объектов, например, для газотурбинных двигателей m<n, и в системах управления такими объектами могут быть использованы селекторы, замыкающие каналы управления различными выходными координатами объекта по определённому признаку.
Наличие такого переключающего элемента обуславливает переменную структуру САУ и не позволяет рассматривать её как линейную. Возникает задача анализа устойчивости таких систем, так как устойчивость отдельных каналов управления не представляет достаточных условий устойчивости всей системы.
Известные работы по динамике таких систем связаны с использованием метода фазовой плоскости и применимы для САУ низкого порядка.
Возможным подходом для оценки устойчивости систем автоматического управления с селектором является метод структурных преобразований, позволяющий привести структуру такой системы к виду, удобному для анализа устойчивости.
Целью данной работы является проведение структурных преобразований САУ с селектором и оценка устойчивости такой системы методами, применимыми для анализа устойчивости нелинейных систем. В работе на основе метода структурных преобразований исследуются условия существования режима непрерывных переключений каналов в системе стабилизации двухмерного объекта с одним управляющим воздействием и с алгебраическим селектором.
-
Структурные преобразования и анализ устойчивости
Селектирование может происходить по различным признакам. Большое распространение в САУ получили селекторы минимальной или максимальной алгебраической величины. Обобщённую структурную схему линейной САУ с селектором n величин и одним управляющим воздействием можно представить в следующем виде:

Рис. 2.1
где
![]() – матрица передаточных функций объекта
управления;
– матрица передаточных функций объекта
управления;
![]() – передаточная
функция регулятора;
– передаточная
функция регулятора;
![]() – матрица
передаточных функций корректирующих
звеньев;
– матрица
передаточных функций корректирующих
звеньев;
![]() – матрица
установок;
– матрица
установок;
![]() – матрица
выходных координат объекта.
– матрица
выходных координат объекта.
Рассмотрим метод структурных преобразований для САУ с алгебраическим фактором двух величин n=2. Работа идеального селектора алгебраического минимума описывается выражением:
 (2.1)
(2.1)
где U1 и U2 – входные сигналы селектора;
ε12 = U1 – U2.
Следовательно, селектор может быть условно описан деформируемой релейной характеристикой, особенностью которой является зависимость уровня ограничения U1 и U2 от величины входного сигнала ε12. Исходя из этого, выражение (2.1) можно преобразовать следующим образом:

 (2.2)
(2.2)
С учётом этого выражения селектор алгебраического минимума двух величин может быть представлен в виде:
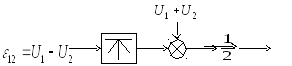
Рис. 2.2
В случае селектора алгебраического максимума двух величин выражение (2.2) примет вид:
 ; (2.3)
; (2.3)
Характеристика модуля на рис. 2.2 в этом случае меняет знак. Структурная схема САУ с алгебраическим селектором двух величин (рис. 2.1) после преобразования приводится к виду:
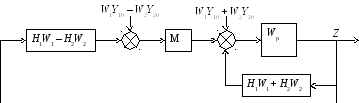
Рис. 2.3 а
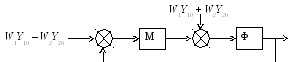
Рис. 2.3 б
где М – нелинейность типа «модуль», или где

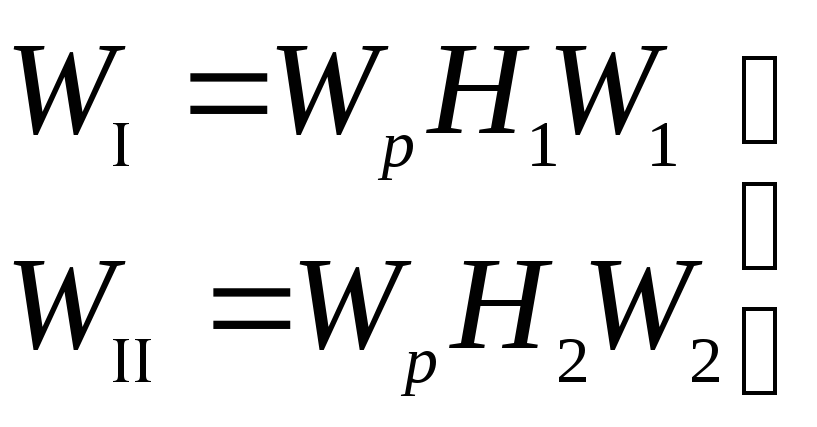 – передаточные
функции отдельных разомкнутых
каналов (2.4)
– передаточные
функции отдельных разомкнутых
каналов (2.4)
Анализ устойчивости двухканальной системы автоматического управления с селектором сводится при этом к анализу устойчивости эквивалентной одноканальной нелинейной системы. Режим нелинейных переключений каналов характеризуется наличием незатухающих колебаний по ошибке:
ε12=U1–U2 (2.6)
Условия существования колебаний в такой нелинейной системе могут быть определены с помощью метода гармонической линеаризации. Вследствие чётности нелинейности типа «модуль» и наличия внешних постоянных сигналов:
а=W1Y10 – W2Y20 и b= W1Y10 – W2Y20 (2.7)
для данной нелинейной системы характерны несимметричные колебания:
![]() (2.8)
(2.8)
причём переключения каналов в системе с селектором возможны лишь при
![]() (2.9)
(2.9)
где Аmax – максимальное значение периодической составляющей ε.
Коэффициенты гармонической линеаризации нелинейности типа «модуль» по постоянной составляющей F0 и первой гармонике q1 имеют следующий вид:
![]()
(2.10)
![]()
где
![]()
k = 1 для селектора максимума;
k = –1 для селектора минимума.
Условия существования колебаний могут быть записаны в виде системы двух уравнений по постоянной составляющей:
A0= a0 – (F0+b0)·Kф; (2.11)
и гармонической составляющей:
q1Ф(jω) = –1; (2.12)
где Кф – статический коэффициент передачи линейной части Ф;
a0 и b0 – установившиеся значения сигналов a и b.
Решение этой системы уравнений определяет параметры колебаний А0, А1, ωс. Следовательно, для возникновения колебаний необходимо пересечение годографа Найквиста для эквивалентной линейной части Ф с годографом комплексного коэффициента нелинейности q1, а также определённое соотношение постоянных уставок Y10 и Y20.
Рассмотрим систему управления двухмерным объектом с селектором алгебраического минимума двух величин:
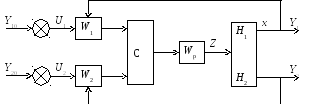
Рис. 2.4
где селектор описывается выражением:
 ; (2.13)
; (2.13)
Н1
– передаточная функция объекта по
первому каналу
![]() ;
;
Н2 – передаточная функция объекта по второму каналу Н2 = 1;
![]() ; W1
= k1; W2
= k2;
; W1
= k1; W2
= k2;
Y10 и Y20 – постоянные уставки.
Рассмотрим передаточные функции отдельных разомкнутых каналов:
![]()

![]()
![]()
где k1 = 10; k2 = 1; kp = 10; Т = 0,56; τ = 0,02.
Передаточная функция всей системы:
![]() ;
;

Годографы Найквиста, построенные для отдельных каналов системы для значений k1, k2, kp, Т, τ, указанных выше, показывают, что в данной САУ с селектором замкнутый канал WІ(p) не устойчив, а замкнутый канал WІІ(p) устойчив (рис. 2.5).
Амплитудно-фазовая характеристика линейной части преобразованной системы Ф(р) приведена на рис. 2.6. Условием возникновения колебаний в такой нелинейной системе является пересечение годографа эквивалентной линейной части Ф(р) с годографом комплексного коэффициента нелинейности. В данном случае последний совпадает с отрицательной частью вещественной оси в интервале от –1 до –∞. Отсюда видно, что в данной системе возможны колебания с частотой ω ≈ 12,3 с-1 (f ≈ 1,96 Гц).
Проанализируем поведение системы во временной области. Для этого опишем звенья с помощью дифференциальных уравнений:
-
Апериодическое звено:
![]()
(2.21)
![]() или
или
![]()
2. ![]()
(2.22)
![]()
Таким образом, данная система описывается системой двух дифференциальных уравнений и уравнением переключения селектора:
 (2.23)
(2.23)
 (2.24)
(2.24)
Результаты моделирования показывают, что устойчивость рассмотренной системы автоматического управления двухмерным объектом с селектором двух величин зависят от значения постоянных уставок.
Система устойчива при условии: Y10 = 1, Y20 < 1 (при Y20 > 1 колебания есть). В этой области выходные координаты изменяются по экспоненциальному закону. Замкнутым оказывается второй канал (рис. 2.4) и Y2 устанавливается за tp – 0,25÷0,3 с.
При значениях уставки Y20 > 1 в системе начинаются незатухающие колебания. Частота колебаний не зависит от значения f ≈ 1,96 Гц; Т = 0,51 с. Амплитуда колебаний Увеличивается с возрастанием уставки.
Чтобы устранить заброс по температуре вводят корректирующие звенья. Условием селектирования является выражение:
Un = UT (2.25)
Возможно несколько вариантов селектирования. Рассмотрим два из них.
1. ε2 = Y20– Y2 = 0; (2.26)
2. ε1 = ε2; (2.27)
Рассчитаем передаточные функции корректирующих звеньев Wk1(p) и Wk2(p) исходя из условий селектирования. Для первого условия (2.26):
Un = Wn(p)ε1, (2.28)
UT = WT(p)ε2 + Wk1(p)WT(p)ε1+ Wk2(p)WT(p)ε2 (2.29)
Из условия селектирования (2.25):
Wn(p)ε1 – WT(p)ε2 + Wk1(p)WT(p)ε1 + Wk2(p)WT(p)ε2, (2.30)
Если Wn(p) = WT(p)Wk1(p) (2.31)
и WT(p) + Wk2(p)WT(p) = 1 (2.32)
то ε2 = 0.
Тогда ![]() (2.33)
(2.33)
![]() (2.34)
(2.34)
Для второго условия (2.27) справедливы выражения (2.28) – (2.30) и если
Wn(p) – Wk1(p)WT(p) = 1 (2.35)
WТ(p) – Wk2(p)WT(p) = 1 (2.36)
то условие селектирования получаем в виде (2.27), тогда
![]() (2.37)
(2.37)
![]() (2.38)
(2.38)
Для моделирования и расчета используем данные для одновального ГТД.
(0,56р + 1)xn = 0,45xGT + 0,86xFc, (2.39)
(0,56р + 1)xТ4 = (0,29р + 0,35)xGT – (0,16р + 0,62) xFc (2.40)
где xn – выходной сигнал по частоте вращения ротора ГТД;
xТ4 – выходной сигнал по температуре газов;
xGT – входное воздействие по расходу топлива;
xFc – входное воздействие по площади сечения сопла.
Из этих уравнений получим:
Передаточные функции по частоте вращения ротора ГТД WnGT(р) и температуре газов WTGT(р):
![]() ; (2.41)
; (2.41)
![]() ; (2.42)
; (2.42)
Передаточная функция исполнительного устройства WИУ(р):
![]() (2.43)
(2.43)
Передаточные функции регуляторов частоты вращения ротора ГТД и температуры газов:
![]() (2.44)
(2.44)
![]() (2.45)
(2.45)
Тогда передаточные функции первого и второго корректирующих звеньев Wk1(p) и Wk2(p) соответственно получим:
для варианта (2.26):
Wk1(p) = 0,778(0,83р + 1) (2.46)
Wk2(p) = 0,35(0,83р + 1) – 1 (2.47)
для варианта (2.27):
Wk1(p) = 0,428(0,83р + 1) (2.48)
Wk2(p) = 0,35(0,83р + 1) – 1 (2.49)
Таким образом, в результате работы:
-
Проведены структурные преобразования системы (рис 2.1) при двухмерном объекте управления к виду, удобному для анализа устойчивости.
-
Показано, что условиями возникновения незатухающих колебаний в системе управления двухмерным объектом с идеальным алгебраическим селектором являются:
-
пересечение годографа Найквиста эквивалентной линейной части системы с годографом комплексного коэффициента нелинейности, т. е. выполнение условия: q1Ф(jω) = –1;
-
выполнение определённого соотношения между постоянными уставками, определяемое условием: А0 = а0 – (F0 + b0)kф; где а0 = k1Y10 – k2Y20; b0 = k1Y10 + k2Y20; k1 и k2 – коэффициенты передачи отдельных разомкнутых каналов.
3. Для системы (рис. 2.4) получено, что при постоянных уставках Y10 = 10, Y20>1 в ней возникают незатухающие колебания. Частота колебаний f ≈ 1,96 Гц не зависит от значения уставок, амплитуда колебаний увеличивается с возрастанием уставки Y20. При значениях уставок Y10 = 10, Y20 > 1 система устойчива.
2.2 Моделирование регулятора частоты вращения ротора и температуры газов ГТД
Моделирование переходных процессов происходящих в САР при подаче на вход единичного воздействия производится с помощью системы MatLAB (пакет SimuLink – интерактивного моделирования динамических систем).
-
Общая характеристика пакета SimuLink
Пакет SimuLink позволяет осуществлять исследование (моделирование) поведения динамических нелинейных систем. Ввод характеристик исследуемых систем производится в диалоговом режиме, путём графической сборки схемы соединений стандартных элементарных звеньев. В результате такой сборки образуется модель исследуемой системы. Которая называется S-моделью. Модель хранится в файле с расширением .mdl.
В качестве «кирпичиков» для построения S-моделей применяются модули (или блоки), хранящиеся в библиотеке SimuLink. Любая S-модель может иметь иерархическую структуру, т.е. состоять из моделей более низкого уровня, причём число уровней иерархии практически не ограничено. В ходе моделирования имеется возможность наблюдать за процессами, происходящими в системе.