

1.1.6 Схемы регулирования температуры газа за турбиной
Рассмотрим схемы регулирования температуры газа за турбиной. Одна из схем - система автоматического регулирования ГТД /2/. Эта схема регулирования (рис 1.26) позволяет добиться упрощения коррекции системы и повышения ее точности. Для этого система дополнительно содержит блок деления 36, первым и вторым входами соединенный с соответствующими выходами блока 19 умножения, связанного вторым входом с выходом вычислительного устройства 15 и 25. Выход блока 36 связан с входом двадцатого, который своим выходом подключен ко второму входу блока 3 умножения.
Система автоматического регулирования ГТД содержит последовательно установленные первый датчик температуры, первый дифференциатор 2, первый блок умножения, первый сумматор 4, вторым входом соединенный с выходом первого датчика 1 температуры, первый элемент сравнения 5, усилитель 6, селектор минимума 7 и исполнительный механизм 8. Также регулятор 9 частоты вращения, соответствующими входами связанный с выходами второго датчика 10 температуры, датчика 11 давления, первого датчика 12 частоты вращения и датчика 13 угла положения, а выходом - со входом селектора 7 минимума, блок 14 формирования уставки, входом подключенный к выходу датчика 13 угла положения, а входом ко второму входу первого элемента сравнения 5, последовательно установленные первое вычислительное устройство 15, второй блок умножения 16, первое функциональное устройство 17, второй сумматор 18 и третий блок 19 умножения, кроме того, второе вычислительное устройство 20, последовательно связанные второй дифференциатор 21, четвертый 22 и пятый 23, подключенные к входу (второму) второго сумматора 18, блоки умножения, соединенные входом и выходом соответственно с выходом второго блока умножения и вторым входом пятого блока умножения, второе функциональное устройство24, третье вычислительное устройство 25, входом подключенное к выходу датчика 11 давления, а выходом ко второму входу четвертого блока умножения, последовательно связанные второй датчик 26 частоты вращения, шестой блок 27 умножения, вторым входом подсоединенный к выходу первого вычислительного устройства 15, второй элемент 28 сравнения и седьмой блок 29 умножения, выходом подключенный к третьему входу второго сумматора 18, третье функциональное устройство 30, четвертое функциональное устройство 31, подключенное выходом ко второму входу седьмого блока 29 умножения, последовательно установленные третий дифференциатор 32, связанный входом с выходом второго датчика 26 частоты вращения, восьмой блок 33 умножения, соединенный вторым входом с выходом третьего вычислительного устройства 25 и девятый блок 34 умножения, подключенный выходом к четвертому входу второго сумматора, а вторым входом к выходу пятого функционального устройства 35. При этом выход второго блока умножения связан также с входами четвертого и пятого функциональных устройств, второй датчик 10 температуры связан с выходом первого вычислительного устройства 15, а первый датчик 12 частоты вращения - со вторым входом второго блока умножения и выходом второго дифференциатора. Первый датчик 1 температуры установлен за турбиной ГТД, а второй датчик 10 температуры установлен, как и датчик 11 давления, на входе двигателя. Первый 12 и второй 26 датчики частоты вращения связаны соответственно с роторами высокого и низкого давления, а датчик 13 угла положения - с рычагом управления двигателя.
Система автоматического регулирования ГТД работает следующим образом: сигнал с датчика 13 угла положения задает уставку регулятора 9 частоты вращения, которая корректируется от внешних условий температуры T1* воздуха на входе двигателя (сигнал датчика 10 температуры) и давления P1 воздуха на входе двигателя (сигналом датчика 11 давления), и через блок 14 формирования уставки задает установку канала температуры, затем селектор 9 минимума осуществляет выбор канала работы в зависимости от величины ошибок по температуре и частоте вращения ротора высокого давления.
Корректирующее звено, предназначенное для компенсации динамической погрешности первого датчика температуры, состоит из первого дифференциатора 2, первого блока умножения 3 и первого сумматора 4 и реализует передаточную функцию WК .З (р):
![]() ; (1.12)
; (1.12)
где р=d/dt – оператор Лапласа;
Тк.з. – постоянная вращения корректирующего звена, соответствующая постоянной времени первого датчика 1 температуры и перестраивающаяся в зависимости от выходного сигнала второго вычислительного устройства 20.
При измерении расхода газа через турбину постоянная времени первого датчика 1 температуры определяется так:
![]() ; (1.13)
; (1.13)
где TТ – расчетная постоянная времени;
GТР – расчетное значение расхода газа;
GТ – текущее значение расхода газа.
Эта зависимость реализуется во втором вычислительном устройстве 20, на вход которого поступает сигнал текущего расхода газа через турбину, а на выходе формируется сигнал, пропорциональный постоянной времени.
Сигнал текущего расхода газов формируется в модели расхода газов, образованной первым 15, третьим 25 вычислителями, первым 17, вторым 24, третьим 30, четвертым 31, пятым 35 функциональными устройствами, вторым 16, третьим 19, четвертым 22, пятым 23, шестым 27, седьмым 29, восьмым 33, девятым 34, блоками умножения, вторым 21, третьим 32 дифференциаторами, блоком 36 деления, реализует полученное из обычной нелинейной упрощенной модели двигателя уравнения расходов газов:
![]() ; (1.14)
; (1.14)
Gт.пр=Gг.пр0 (n2пр0)+А1(n2пр)Δn1пр+А2(n2пр)n2пр А3(n2пр)n1пр; (1.15)
где T1* – температура заторможенного потока воздуха на входе в двигатель;
P1* – давление заторможенного потока воздуха на входе в двигатель;
n1, n2 – частоты вращения роторов низкого и высокого давления соответственно.
А1(n2пр)=ΔA1/Δ;
А2(n2пр)=ΔA2/Δ;
А3(n2пр)=ΔA3/Δ;
Δ=Kn1FгKn2GТ–Kn2FгKn2GТ;
ΔA1=Kn1n1ΔA3–Kn2n1ΔA2+KGгn1Δ;
ΔA2=Kn1FгKGТ–KG1FгKn1GТ;
ΔA3=KGТFгKn2Gг–Kn2FгKGТGг; (1.16)
![]() ,
i=1,
2;
,
i=1,
2;
niпр=ni=1,033/P1, i=1, 2;
![]() ;
;
ΔGт.пр=Gт.пр–Gт.пр0(n2пр);
Δn1пр=n1пр–n1пр0(n2пр);
ΔFгэ=Fгэ–Fгэ0(n2пр);
ΔGг.пр=Gг.пр–Gг.пр0(n2пр);
ΔKij(n2пр) – известные функции коэффициентов упрощенной модели в зависимости от приведенной частоты вращения ротора высокого давления;
0 – статические характеристики двигателя;
пр. – приведенные параметры.
Сигнал
с выхода второго датчика 10 температуры
поступает на первое вычислительное
устройство, которое реализует зависимость
![]() ,
третье функциональное устройство 30
реализует n1пр0(n2пр),
после второго элемента 28 сравнения
получим:
,
третье функциональное устройство 30
реализует n1пр0(n2пр),
после второго элемента 28 сравнения
получим:
Δn1пр0=n1пр–n1пр0(n2пр). (1.17)
Четвертое функциональное устройство 31 реализует A1(n2пр) и после седьмого блока 29 умножения будет A1(n2пр)n2пр, на выходе восьмого блока 33 умножения получается n1пр, после пятого функционального устройства 35 имеется A3(n2пр), затем после девятого блока 34 умножения A3(n2пр)n1пр.
В результате после второго сумматора 18 имеется сигнал GТ, сформированный согласно второму уравнению системы, а на выходе блока 36 деления получаем:
![]() ; (1.18)
; (1.18)
то есть физический текущий расход газа.

Рис. 1.26 – Система автоматического регулирования ГТД
Сигнал с выхода второго вычислительного устройства 20 TТ=Tт.пр(Gт.пр/GТ)0,3 поступает на первый блок 3 умножения и изменяет коэффициент при производной в корректирующем звене так, чтобы скомпенсировать динамическую погрешность первого датчика 1 температуры.
Эта схема автоматического регулирования температуры обладает высокой точностью коррекции инерционности термопары, но в данной схеме не учитывается взаимодействие каналов частоты вращения ротора и температуры через селектор на переходных режимах.
Следующая схема регулирования /1/ - это система регулирования ГТД.
Схема (рис. 1.27) содержит канал регулирования частоты вращения ротора компрессора низкого давления, включающий последовательно соединенные датчики частоты вращения 2 ротора компрессора низкого давления, первый измеритель 3 частоты вращения ротора компрессора высокого давления, второй измеритель 6 частота и второй формирователь 7 программ, канал регулирования температуры газов, включающий последовательно соединенные блок 8 термопар, измеритель 9 термо–э.д.с., устройство 10 коррекции и формирователь 11 программы регулирования температуры газов, выход которого через первый широтно-импульсный модулятор 13 подключен к исполнительному механизму 14, связанному с ГТД.
Кроме того, устройство содержит блоки 15 и 16 коррекции передаточных функций каналов регулирования частоты вращения роторов компрессоров низкого и высокого давлений, первый и второй сумматоры 17 и 18 и последовательно соединенные датчик 19 скоростного напора воздуха и второй широтно-импульсный модулятор 21, генератор 22 пилообразного напряжения, выход которого подключен ко второму входу второго широтно-импульсного модулятора 21, выход первого формирователя 4 программ подключен к первому входу первого сумматора 17 и к первому входу устройства 15 коррекции передаточной функции канала регулирования частоты вращения ротора компрессора низкого давления, выход которого подключен ко второму входу первого сумматора 17,выход которого подключен ко второму входу селектора 12 минимума, третий вход которого подключен к выходу второго сумматора 18, выход второго формирователя 7 программ подключен к первому входу второго сумматора 18 и к первому входу устройства 16 коррекции передаточной функции канала регулирования частоты вращения ротора компрессора высокого давления, выход которого подключен ко второму входу второго сумматора 18, выход второго широтно-импульсного модулятора 21 подключен ко вторым входам устройств 15 и 16 коррекции передаточных функций каналов регулирования частоты вращения роторов компрессоров высокого и низкого давления и устройства 10 коррекции постоянной времени термопары.
Система работает следующим образом. В каналах регулирования частоты вращения роторов компрессоров низкого и высокого давлений устройства 15 и 16 коррекции корректируют выходной сигнал формирователей 4 и 7 программ каналов регулирования (сигнал рассогласования), а в канале регулирования температуры газа устройство 10 коррекции корректирует выходной сигнал измерителя 9 термо–ЭДС.
Частоты вращения роторов компрессоров низкого и высокого давления преобразуются датчиками 2 и 5 в сигналы напряжения переменного тока и подаются на входы измерителей 3 и 6, выходные напряжения в которых, пропорциональные частотам вращения роторов, поступают на формирователи 4 и 7 для формирования программ регулирования частот вращения роторов компрессоров низкого и высокого давления, где сравниваются с заданными значениями, и формируются выходные напряжения U1 и U2 каналов регулирования частот вращения, пропорциональные рассогласованиям между заданными частотами вращения и реальными (сигналы рассогласования каналов регулирования), которые подаются на первые входы устройств 15 и 16 коррекции передаточных функций каналов регулирования частот вращения и на первые входы сумматоров 17 и 18, на вторые входы которых поступают сигналы с выходов устройств 15 и 16 коррекции передаточных функций каналов регулирования частот вращения. Сумматоры 17 и 18 формируют выходные напряжения U1 и U2 каналов регулирования частот вращения.
Одновременно сигнал скоростного напора воздуха за компрессором газотурбинного двигателя 1 поступает с датчика 19 на вход измерителя 20 скоростного напора. Напряжение, пропорциональное скоростному напору, поступает на первый выход широтно-импульсного модулятора 21, на второй вход которого поступает сигнал с генератора 22 пилообразного напряжения.
Выходной сигнал широтно-импульсного модулятора 21 в виде импульсов переменной скважности 4, которая изменяется в заданной функции от скоростного напора, поступает на второй вход устройства 10 коррекции постоянной времени термопары и вторые входы устройств 15 и 16 коррекции передаточных функций каналов регулирования частот вращения роторов компрессоров низкого и высокого давления.

Рис. 1.27 – Система регулирования ГТД
Выходной сигнал устройства 10 коррекции постоянной времени термопары поступает на вход формирователя 11 программы регулирования температуры газов, где сравнивается с заданной температурой и формируется выходное напряжение U3 канала регулирования температуры газов, пропорциональное рассогласованию между заданной и реальной температурой газа выходные сигналы U1 и U2 каналов регулирования частот вращения с выходов сумматоров 17 и 18 и выходной сигнал U3 канала регулирования температуры газов с выхода формирователя 11 программы регулирования температуры газов поступают на селектор 12 минимума. На выход селектора 12 проходит выходной сигнал того канала регулирования, который в данный момент по условиям работы двигателя требует меньшего расхода топлива.
Сигнал с селектора 12 через широтно-импульсный модулятор 13 и исполнительный механизм 14 воздействует на расход топлива в двигателе 1.
Таким образом, система обеспечивает высокое качество регулирования, заключающееся в малых величинах перерегулирования при малых временах приемистости на всех режимах работы двигателя при различных условиях эксплуатации, что достигается коррекцией передаточных функций каналов регулирования в зависимости от величины скоростного напора воздуха за компрессором.
Еще одна схема регулирования представлена в /3/. Этот способ регулирования температуры ГТД позволяет улучшить качество переходных процессов за счет исключения на приемистости забросов температуры газов перед турбиной. Сигнал от датчика 5 (рис. 1.28) частоты вращения ротора поступает через инерционное звено 10 на первый вход элемента 11 сравнения, на второй вход которого идет с противоположным знаком сигнал от того же датчика 5 частоты вращения ротора. С выхода элемента 11 сигнал поступает на суммирующий усилитель 4, на котором происходит сравнение сигнала температуры замеренного блоком 1 термопар, с сигналом от датчика 3. На приемистости расход топлива изменяется пропорционально большему из выходных сигналов суммирующих усилителей 4 и 7. Корректирующий сигнал с выхода элемента 12 с нелинейной характеристикой по существу снижает установку температуры газа, задаваемую задатчиком 3, компенсируя тем самым запаздывание прогрева лопаток турбины.

Рис. 1.28 – Регулирование температуры ГТД
Этот способ регулирования ГТД относится, в частности, к регулированию подачи топлива и добивается улучшения качества переходных процессов исключением на приемистости забросов температуры газов перед турбиной.
Устройство содержит блок 1 термопар, дифференциатора 2, первый задатчик 3, первый суммирующий усилитель 4, имеющий четыре входа датчик 5 частоты вращения ротора, второй задатчик 6, второй суммирующий усилитель 7, с двумя входами, селектирующее устройство 8, исполнительный механизм 9 топливоподачи, инерционное звено 10 с постоянной времени прогрева турбины или больше, элемент 11 сравнения и элемент 12 с нелинейной характеристикой (например, экспоненциальной или параболической характеристикой).
При этом датчик 5 частоты вращения ротора подключен к первому входу второго суммирующего элемента - усилителя 7, вторым входом связанного со вторым задатчиком 6, к первому входу элемента 11 сравнения, через выход которого подсоединен к выходу элемента 12 с нелинейной характеристикой. Блок 1 термопар соединен непосредственно и через дифференциатор 2 соответственно с первым и вторым входами первого суммирующего усилителя 4, третий и четвертый входы которого связаны соответственно с первым задатчиком 3 и элементом 12 нелинейной характеристикой. Первый 4 и второй 7 суммирующие усилители присоединены к соответствующим входам селектирующего устройства 8, выходом связанного с входом исполнительного механизма 9 топливоподачи.
Способ регулирования осуществляется следующим образом. Сигнал от датчика 5 частоты вращения ротора поступает через инерционное звено 10 на первый вход элемента 11 сравнения, на второй вход которого идет с противоположным знаком сигнал от того же датчика 5 частоты вращения ротора. Сигнал с выхода элемента 11 поступает на четвертый вход суммирующего усилителя 4, на котором происходит сравнение сигнала температуры замеренного блоком 1 термопар, с сигналом первого задатчика 3.
На установившихся режимах сигнал на входе инерционного звена 10 равен сигналу от датчика 5 частоты вращения ротора и сигнал на входе элемента 11 сравнения отсутствует. При увеличении режима работы ГТД сигнал на входе инерционного звена 10 запаздывает относительно сигнала на его входе и на выходе элемента 11 сравнения появляется корректирующий сигнал, компенсирующий прогрев турбины.
При работе устройства сигнал на выходе второго суммирующего усилителя 7 нулевой, а на входе первого суммирующего усилителя 4 отрицательный. Селектирующее устройство 8 пропускает на исполнительный механизм 9 топливоподачи нулевой выходной сигнал второго суммирующего усилителя 7 и расход топлива в двигателе не изменяется.
На приемистости расход топлива изменяется пропорционально большему из выходных сигналов первого 4 и второго 7 суммирующих элементов (усилителей). При этом корректирующий сигнал с выхода элемента 12 с нелинейной характеристикой, по существу снижает уставку температуры газа, задаваемую первоначально задатчиком 3, компенсируя тем самым запаздывание из-за прогрева лопаток турбины. Собственно постоянная времени блока термопар 1, компенсируется сигналом дифференциатора 2.
Этот способ регулирования температуры ГТД обеспечивает подстройку одного из каналов относительно другого, но имеет длительное время возврата в исходный режим из-за инерционности изодромной обратной связи.
-
Выбор и описание разрабатываемой схемы
-
Обоснование выбранной схемы
Наиболее близкой к требуемым характеристикам является САР ГТД, содержащая в своем составе измерители частоты вращения n, температуры газа за турбиной T4*, регуляторы этих параметров, селектор минимума, исполнительное устройство, воздействующее на расход топлива GТ ГТД.
Учитывая достоинства и недостатки предыдущих схем, выберем схему, которая представлена на рис. 2.1.

Рис. 2.1
ЗУ – задатчик уставки;
Р – регулятор;
Сел. min – селектор минимума;
КУ – корректирующее устройство;
ИУ – исполнительное устройство;
Д – датчик;
СУ – сравнивающее устройство;
С – суммирующее устройство;
ГТД – газотурбинный двигатель
Эта схема обеспечивает лучшее качество работы канала на переходных режимах, что достигается за счет адаптивной коррекции инерционности термопары по частоте вращения ротора и изменением уставки канала температуры.
Работа селектора минимума описывается выражением:
 (2.1)
(2.1)
или с учетом разности входных сигналов: ε = U1 - U2 (2.2)
следующим образом:
 . (2.3)
. (2.3)
Следовательно, селектор минимума может быть представлен относительно разности входных сигналов ε в виде нелинейных структур на рис. 2.2 и рис. 2.3, включающих в себя нелинейности типа “модуль” и “ключ”.

Рис. 2.2 – Нелинейность типа “модуль”
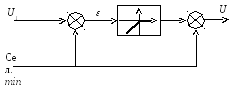
Рис. 2.3 – Нелинейность типа “ключ”