

Свёртка функций
Пусть ![]() —
две функции, интегрируемые на
пространстве
—
две функции, интегрируемые на
пространстве ![]() .
Тогда их свёрткой называется функция
.
Тогда их свёрткой называется функция ![]() ,
определенная формулой
,
определенная формулой

Rd - пространство.
(3.1)
В частности,
при ![]() формула
принимает вид:
формула
принимает вид:

(3.4)
Свёртка ![]() определена
при почти всех
определена
при почти всех ![]() и
интегрируема
и
интегрируема
В программном коде считаем интеграл:
![]()
Получаем ответ:

Строим полученную функцию, а так же исходную.
5.Заключение
На сегодняшний день технология компьютерного моделирования тесно взаимосвязана со многими сферами жизнедеятельности человека. Транспорт, медицина, техника, спорт – всё это потребители этой технологии.
Широчайшее использование и в науке, которое в свою очередь требует создание быстрых суперкомпьютеров, способных в секунду делать до сотни миллиардов операций.
Разумеется, компьютерное моделирование не может привести к открытию совершенно нового явления, скажем, элементарной частицы с неожиданными свойствами. Однако именно компьютерное моделирование привело, например, к возникновению
нового взгляда на интересное и сложное явление – турбулентность. Кстати, и в работах, приводящих к открытию новых элементарных частиц и исследованию их свойств, моделирование не только используется на этапе проектирования экспериментальных установок, но и является непременной составной частью обработки экспериментальных данных.
Сейчас мы стоим на пороге новой эры – эры «умных технологий», которые в скором будущем дадут ответы на множество интересующих человечество проблем и в то же время появится новые вопросы, на которые снова науке придется искать ответ.
6.Источники
Майер Р.В. «Компьютерное моделирование физических явлений»
Г. Л. Коткин, В. С. Черкасский «Компьютерное моделирование физических процессов с использованием MATLAB»
Общедоступная универсальная интернет-энциклопедия Википедия[Электронный ресурс] http://ru.wikipedia.org
Официальный сайт разработчиков “Mathematica” [Электронный ресурс] /англ. - Режим доступа:
http://wolfram.com/
Образовательный математичнский сайт [Электронный ресурс]
http://www.exponenta.ru/educat/news/vygovskiy/vygovskiy.asp
http://www.exponenta.ru/educat/systemat/cherkassky/archive/main.pdf
7.Приложение
Задача № 1
Код программы:
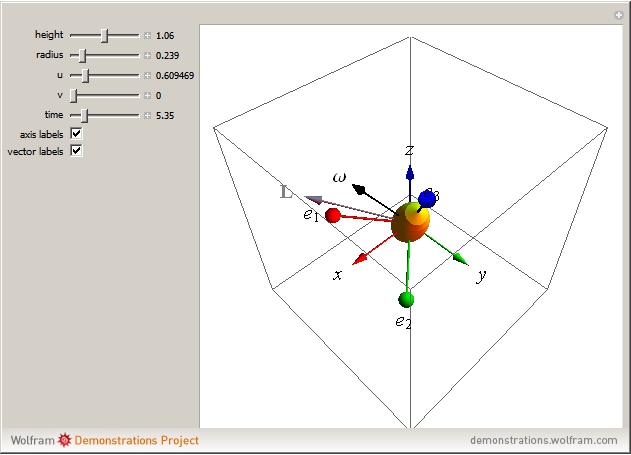
PlotRotateL[h_,R_,u_,v_,tx_,axeslabel_,veclabel_]:=Module[{,L,r,e1, e2, e3,I1,I2,I3,x0,y0,z0},
I1 = 1+(1/4)(h/R)2; (* These are the principal moments of our boday, assuming M R^2/5 = 1 *)
I2 = 1+(1/4)(h/R)2; (* The body has radius R and height h *)
I3 = 2;
:= {Sin[u]Cos[v],Sin[u]Sin[v],Cos[u]}; (* Angular velocity in space frame *)
r[t_]:=RotationMatrix[t,].{x0,y0,z0}; (* Rotation of a position vector (x0,y0,z0) *)
e1[t_]:=r[t]/.{x01,y00,z00}; (* Body axes in the space frame are rotating *)
e2[t_]:=r[t]/.{x00,y01,z00};
e3[t_]:=r[t]/.{x00,y00,z01};
L[t_]:=I1 (.e1[t])e1[t]+I2 (.e2[t])e2[t]+I3 (.e3[t])e3[t];
(* The angular momentum in space frame is (I.), where is first expressed in terms of the body axes:
= (.e1body[t])e1body[t] + (.e2body[t])e2body[t] + (.e3body[t])e3body[t] *)
Graphics3D[{
{Red,Tube[{{0,0,0},e1[tx]},0.015]},
{Red,Sphere[e1[tx],0.1]}, (* e1 axis has a red sphere, rotating *)
{Green,Tube[{{0,0,0},e2[tx]},0.015]},
{Green,Sphere[e2[tx],0.1]}, (* e2 axis has a green sphere, rotating *)
{Blue,Tube[{{0,0,0},e3[tx]},0.015]},
{Blue,Sphere[e3[tx],0.1]}, (* e3 axis has a blue sphere, rotating *)
{Yellow,Tube[Table[ e3[tx]h z ,{z,-0.5,0.5,0.1}],Table[R Sqrt[1-4z2],{z,-0.5,0.5,0.1}]]},
(* Our body is a collection of tubes of different radii, in yellow *)
{Black,Arrow[Tube[{{0,0,0},1.5}]]}, (* angular velocity is in black *)
{Gray,Arrow[Tube[{{0,0,0},1.5L[tx]/Norm[L[tx]]}]]}, (* angular momentum is in gray *)
If[axeslabel,{
Text[Style["x",Italic,20],{1.2,0,0}],
Text[Style["y",Italic,20],{0,1.2,0}],
Text[Style["z",Italic,20],{0,0,1.2}],
Text[Style["e1",20],1.25e1[tx]],
Text[Style["e2",20],1.25 e2[tx]],
Text[Style["e3",20],1.25e3[tx]]},{}],
If[veclabel,{Gray,
Text[Style["L",Bold,20],1.7 L[tx]/Norm[L[tx]]],Black,Text[Style["",20],1.7]},{}],
{Red,Arrow[Tube[{{0,0,0},{1,0,0}}]]}, (* x-axis is red, fixed *)
{Green,Arrow[Tube[{{0,0,0},{0,1,0}}]]}, (* y-axis is green, fixed *)
{Blue,Arrow[Tube[{{0,0,0},{0,0,1}}]]}},
PlotRange1.5,ViewPoint{1,1,1.5},ImageSize395]] (* z-axis is blue, fixed *);
Manipulate[
PlotRotateL[h,R,u,v,tx,axislabel,veclabel],
{{h,0.1,"height"},0.1,2,.01,Appearance"Labeled",ImageSizeTiny},
{{R,0.1,"radius"},0.1,1,.01,Appearance"Labeled",ImageSizeTiny},
{u,0,,.01,Appearance"Labeled",ImageSizeTiny},
{v,0,2,.01,Appearance"Labeled",ImageSizeTiny},
{{tx,0,"time"},0,30,.01,AnimationRate1,Appearance"Labeled",ImageSizeTiny},
{{axislabel,False,"axis labels"},{True,False}},
{{veclabel,True,"vector labels"},{True,False}},
SaveDefinitionsTrue,
ControlPlacementLeft]
Результат:
Рис.1 Момент импульса твердого тела
Задача № 2
Код программы:
Framed@Text[Style["(t,)-?
, t,
/t=
=t
integrating, we obtain:
![]()
=
=
![]() t
=>
t
=>
=t",Large,Italic, Blue,TextAlignmentCenter]]
{\pard{}}(*Manipulate[Plot[=Чt,{t, 0, 10},PlotLabel"Angular velocity", AxesLabel{"t","(t)"},PlotStyleThickness[0.01]], {,1, 1.25}, {t, 0, 10}]*)
{\pard{}} Manipulate[Show[Plot[=Чt/.{ 12.5},{t, 0, 10},PlotLabel"Angular velocity", AxesLabel{"t","(t,)"},PlotStyleThickness[0.01]],ListPlot[{{t,=Чt}/.{ 12.5}},PlotStyle{Blue,PointSize[0.03]}]],{t,0,10}, {,1, 1.25}]
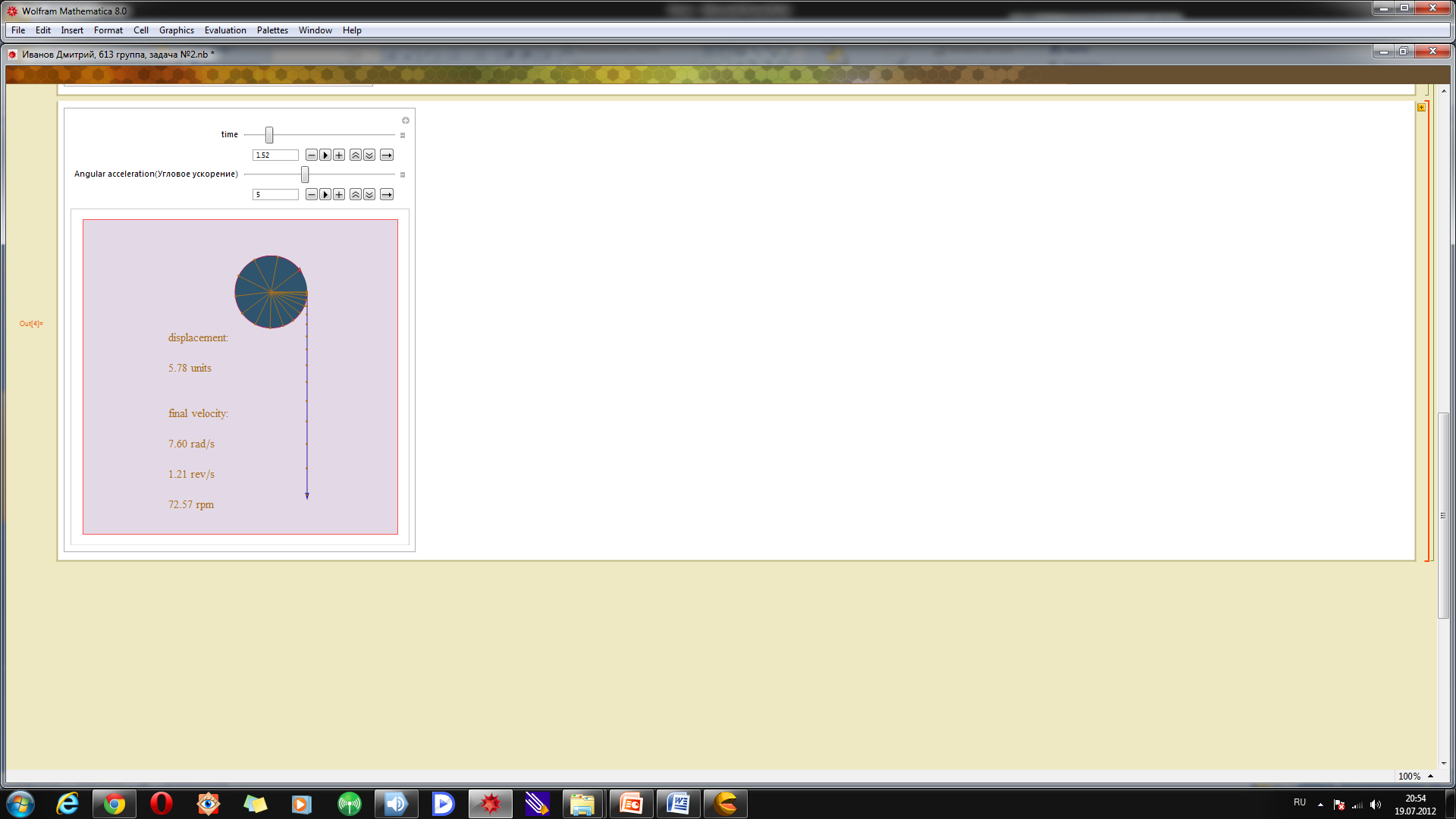
Manipulate[Graphics[{RGBColor[.18,.33,.43],Disk[],RGBColor[.29,.71,.93]{\pard{}},Disk[{0,0},1,{2 -( t2)/2,2 }],RGBColor[.68,.11,.36],Thickness[.001],Arrowheads[.05],
Arrow[Append[Table[{Cos[2 -1],Sin[2 -1]},{1,0,( t2)/2,/40}],{Cos[2 -( t2)/2],Sin[2 -( t2)/2]}]],RGBColor[.18,.11,.66],Arrow[{{1,0},{1,-(1/2) ( t2)}}],RGBColor[.65,.43,.12],Table[{Point[{Cos[( time2)/2],-Sin[( time2)/2]}],Line[{{0,0},{Cos[( time2)/2],-Sin[( time2)/2]}}]},{time,0,t,.1}],Table[Point[{1,-(1/2) ( time2)}],{time,0,t,.1}],Text[Style[Column[{"displacement:","",Row[{NumberForm[( t2)/2,{9,2}]," units"}],"","","final velocity:","",Row[{NumberForm[ t,{4,2}]," rad/s"}],"",Row[{NumberForm[ t/(2),{4,2}]," rev/s"}],"",Row[{NumberForm[60 t/(2),{4,2}], " rpm"}]},AlignmentLeft],15],{-2,-(12.5/2)/2-.5}]},PlotRange{{-3,1.3},{-(12.5/2)-.5,2}},ImageSize1.5 {300,300},BackgroundLightBlue],
{{t,.2,"time"},0,10,Appearance"Open"},{{,5,"Angular acceleration"},0,12.5,Appearance"Open"}]
Результат:
Рис.2 Угловая скорость
Задача № 3
Код программы:
R0=100;
s[x_]:=Integrate
[R0*![]() *
*![]() ,{,0,}]
,{,0,}]
s[x]
Manipulate[Plot[{![]()
![]()
![]()
(-1+
(-1+![]() +Erfc[(
Log[2])/(
+Erfc[(
Log[2])/(![]() T)])
R0,R0*
T)])
R0,R0*![]() },{x,0,20},PlotRange{-10,200}
],{T,1,10,1},{,1,6,0.1},{t,0,
100}
},{x,0,20},PlotRange{-10,200}
],{T,1,10,1},{,1,6,0.1},{t,0,
100}
Результат:
Рис. 3 Период полураспада

Рис.4 Момент импульса твердого тела.
Рис.5 Угловая скорость

