

21. Основные теории секстана. Выверки. Опр. Поправки индекса.
Теоретические основы секстана
Секстаном называется угломерный инструмент, построенный на принципе отражательной системы и предназначенный для измерения углов на подвижном основании.
Рис. 37 |

Отражательная система секстана состоит из 2–х зеркал А и В, плоскости которых перпендикулярны плоскости рисунка:
В – большое (подвижное) зеркало, которое вращается на оси перпендикулярной плоскости рисунка (лимба);
А – малое (неподвижное) зеркало, причем его левая половина прозрачная для прохождения луча от прямовидимого объекта Г , а правая половина – зеркальная.
– угол падения (отражения) луча светила (объекта) на большом зеркале В.
– угол падения (отражения) отраженного луча от большого зеркала В на малое зеркало А.
Измерение угла достигается путем поворота зеркала В до совмещения дважды отраженный луч от объекта З (светило) с прямовидимым лучом от объекта Г (горизонт).
Установим зависимость между измеряемым углом h и углом образованным пересечением плоскостей зеркал .
Поправка места нуля. Действительное место нуля секстана практически не совпадает с нуль-пунктом лимба вследствие нарушения правильного положения малого и большого зеркал при работе с секстаном.
Рис. 38 |

Поправкой места нуля i0 называется разность между нуль-пунктом 0° (360°) и отсчетом места действи-тельного нуля на лимбе М0.
iо = 0°(360°) – Mo (71)
Например, на рис. 38 поправка положительная (+ io).
Так как при измерении углов отсчет на лимбе секстана (ОС – отсчет секстана) снимается относительно 0°, то действительный угол получим после исправления его поправкой iо, т. е.
h = OC + iо. (72)
Поправка за параллакс зеркал. В навигации секстан используется для измерений горизонтальных и вертикальных углов относительно земных ориентиров или измерений высоты светила относительно земного объекта (например, берега или ватерлинии другого судна перекрывающих горизонт под светилом). Так как расстояние между центрами зеркал А и В по вертикали (сторона ВЕ рис. 38) приблизительно равна 5 см., то лучи ПВ и ПА не параллельны и образуют угол у.
Параллаксом зеркал называется угол, под которым видны зеркала А и В со стороны ориентиров.
При совмещении прямовидимого луча П1 с отраженным от зеркала В лучом П2 (линия П1П2 в окуляре трубы рис. 38) получим начальный отсчет на лимбе Мo (линия ВМo). Линии Г1 прямовидимый (слева) и Г2 отраженный (справа) горизонты. Угол между ними равен у.
Величина угла у зависит от расстояния ПЕ. Определим расстояние, при котором у < 0,1. Из ПВЕ имеем
tg y = BE / ГЕ, (73)
принимая tg y = у arc 1 получим
 (74)
(74)
Следовательно, при расстоянии более 1 мили у = 0.
Поправка индекса секстана. Отсчет на лимбе секстана при совмещении прямовидимого и отраженного изображений объекта называется отсчетом индекса Oi.
Поправкой индекса секстанa i называется алгебраическая разность между нуль-пунктом 0°(360°) и отсчетом индекса секстана.
i = 0°(360°) – Oi (75)
Поправка индекса может быть со знаком «+» или «–» и равна сумме поправки места нуля лимба (io) и параллакса зеркал (у).
Выверка секстана. При измерении углов в отсчетах секстана (ОС) имеются погрешности, как в отсчете любого механического измерительного прибора. Эти погрешности для секстана возникают из-за нарушения параллельности визирной оси дневной трубы плоскости лимба, перпендикулярности плоскости большого и малого зеркал к плоскости лимба, т. е. параллельность плоскостей зеркал в положении алидады 0°.
Процесс регулировки секстана с целью уменьшения этих ошибок называется выверкой секстана. В комплект секстана входят два диоптра и регулировочный ключ, предназначенные для выполнения выверки секстана.
Выверка секстана выполняется в следующей последовательности:
параллельность оси дневной трубы плоскости лимба;
перпендикулярность большого зеркала к плоскости лимба;
перпендикулярность плоскости малого зеркала к плоскости лимба методом параллельности плоскостей большого и малого зеркал;
уменьшение поправки индекса секстана – параллельность плоскостей зеркал в положении алидады 0°.
Выверка параллельности оси дневной трубы плоскости лимба. Приблизительная оценка параллельности (проверка необходимости выполнения выверки) выполняется секстаном с дневной трубой и алидадой установленной на отсчет более 30°, причем трубу секстана следует направить ниже горизонта.
Выверка перпендикулярности большого зеркала к плоскости лимба. Эта выверка выполняется в помещении. Секстан без трубы устанавливается горизонтально на ящик секстана. Алидаду поставить на отсчет около 40° и откинуть светофильтры большого зеркала.
Выверка перпендикулярности малого зеркала плоскости лимба методом параллельности плоскостей зеркал. Эта выверка выполняется с дневной трубой секстана ночью по неяркой звезде, находящейся на небольшой высоте, а днем по Солнцу.
Уменьшение поправки индекса секстана. Уменьшение поправки индекса секстана выполняется путем изменения положения малого зеркала с помощью его регулировочного винта 3 рис. 42.
Она может выполняться по горизонту, звезде или Солнцу так же, как выверка параллельности малого зеркала большому зеркалу. Отличие состоит в том, что отраженное и прямовидимое светило совмещается при помощи регулировочного винта по вертикали.
Рис. 47 |
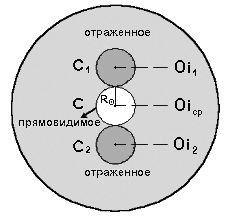
Алидаду секстана, приготовленного для наблюдений Солнца, устанавливают около 0° (между отсчетом 0° и 359°). После наведения трубы на Солнце отраженное изображение С1 будет находиться над прямовидимым изображением С.
Вращая отсчетный барабан, совместить край отраженного изображения С1 с краем прямовидимого С (рис. 47 положение С1) и снять первый отсчет секстана Оi1 (359°--,-‘).
Затем перевести отраженное изображение С1 через прямовидимое в положение С2 и снять отсчет секстана Оi2 (0°--,-′=360°--,-′).
Средний отсчет Оiср соответствует отсчету совмещения центров прямовидимого и отраженного изображений Солнца, а поправку индекса получим по формуле
 (79)
(79)
Оценка точности наблюдений основана на сравнении действительного радиуса Солнца (RМАЕ), который находим в МАЕ на дату наблюдений, с радиусом, полученным из наблюдений (Rизм).
По рис. 47 видно, что разность отсчетов индексов равна
4Rизм = Оi2 – Оi1. (80)
Расхождение 4Rизм с 4RМАЕ должно быть не более ±0,4. Расхождение больше +0,4 означает, что край отраженного Солнца не совмещен (не доведен) с краем прямовидимого Солнца, а расхождение меньше –0,4 означает перекрытие краев отраженного и прямовидимого Солнца.
Точность поправки индекса по Солнцу 0,1 обеспечивается при осреднении 3-х значений i.