

Расчет механизма передвижения крана
В мостовых кранах возможны два механизма передвижения: с раздельным или центральным приводом. Вариант привода выбирается в зависимости от грузоподъемности и параметров крана. Сопротивления передвижению крана аналогичны сопротивлениям самоходной грузовой тележки, поэтому расчет механизма передвижения крана ведется также, как и для механизма передвижения тележки.
Сопротивление передвижению крана с двухребордными колесами.
Нагрузка на ходовое
колесо крана определяется аналогично
нагрузке на ходовое колесо тележки. В
данном случае используется масса крана,
которая нам неизвестна. Поэтому необходимо
определить конструкцию моста крана
(коробчатая или решетчатая) и произвести
его расчет для определения массы крана.
Кроме того, при определении нагрузки
на колесо большое значение имеет масса
кабины с электрооборудованием и положение
тележки в пролете крана. Для кранов грузоподъемностью выше 16
тон следует использовать следующую
схему:
Для кранов грузоподъемностью выше 16
тон следует использовать следующую
схему:
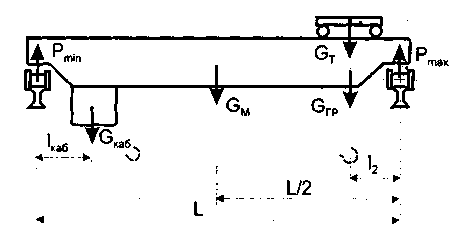
Рис. 7. Расчетная схема положения грузовой тележки крана справа
Числовые значения
параметров
![]() можно найти в литературе [1,2,8].
можно найти в литературе [1,2,8].
Значения ![]() можно
принять одинаковыми для всех кранов,
равными 2,4 м. Вес
кабины по ГОСТ 25711-83 GK
=
16 кН.
Вес моста крана по ГОСТ 25711-83 примем 268
кН.
можно
принять одинаковыми для всех кранов,
равными 2,4 м. Вес
кабины по ГОСТ 25711-83 GK
=
16 кН.
Вес моста крана по ГОСТ 25711-83 примем 268
кН.
Составим уравнение моментов относительно левой точки опоры крана и найдем максимальную нагрузку на правые колеса крана.
![]()

 Нагрузка
на одно колесо:
Нагрузка
на одно колесо:
![]()
Выбор колес.
По [2, табл. 2.11],
используя значение ![]() ,
выбираем колесо диаметром D
= 630 мм;
,
выбираем колесо диаметром D
= 630 мм; ![]() .
.
Выбор колесных установок.
По диаметру колеса выбираем стандартные колесные установки (Приложение 8): приводную колесную установку К2РП-630 исполнения 1 (один конец вала со шпонкой) и неприводную К2РН-630, имеющие параметры: D=630 мм; d=110 мм; В=100мм; mк.у.пр = 471,61 кг; ; zре6 = 2 mк.у.непр=452,14 кг. Форма поверхности катания - цилиндрическая. Тип подшипника - роликовый радиальный сферический двухрядный с симметричными роликами.
 Выбор
подкранового
рельса
Выбор
подкранового
рельса
По [2, табл. 2.11] выбираем рельс КР-80 ГОСТ 4121-76 с выпуклой головкой. Значение b равно 80 мм. Проверим соотношение ширины дорожки катания колеса В и головки рельса b: В-b = 110 - 80 = 30 мм, что не меньше нормы, указанной в [2, табл. 2.11]. Другие параметры рельса: R = 400 мм; bосн=130 мм; у = 6,43 см; F = 81,13 см²; Jх = 1547 см4; mпог =63,7 кг; lмерн=9,0; 9,5; 10,0; 10,5; 11,0; 12,0; lнем =4...12м; материал-сталь М62.
Сопротивление передвижению крана
Сопротивление передвижению крана с номинальным грузом WCT, кH,
при установившемся режиме работы равно
 где
d
- диаметр
цапфы колеса, мм
[8, т.2, табл. V.2.43];
DK
=630 - диаметр
ходового
колеса,
выбранный по максимальной нагрузке,
мм;
f=0,015
– коэф-фициент
трения в опоре
вала колеса [2, табл. 2.14];
где
d
- диаметр
цапфы колеса, мм
[8, т.2, табл. V.2.43];
DK
=630 - диаметр
ходового
колеса,
выбранный по максимальной нагрузке,
мм;
f=0,015
– коэф-фициент
трения в опоре
вала колеса [2, табл. 2.14]; ![]() - коэффициент трения качения колеса по
рельсу,
мм [2, табл. 2.13]; Кр=2,5-
коэффициент реборд, определяемый в
основном
трением
реборд о головку рельса и трением
элементов токосъемного устройства
[2, табл. 2.15]; сопротивление, создаваемое
уклоном
подкранового пути:
- коэффициент трения качения колеса по
рельсу,
мм [2, табл. 2.13]; Кр=2,5-
коэффициент реборд, определяемый в
основном
трением
реборд о головку рельса и трением
элементов токосъемного устройства
[2, табл. 2.15]; сопротивление, создаваемое
уклоном
подкранового пути:
![]() ;
;
![]() - уклон рельсового пути для крана [2,
с.41].
- уклон рельсового пути для крана [2,
с.41].
Выбор электродвигателя и редуктора
 Двигатель
механизма передвижения обычно выбирается
серии MTKF,
МТКН [2,8] таким образом, чтобы отсутствовала
пробуксовка ведущих колес незагруженной
тележки, а коэффициент запаса сцепления
должен быть не менее 1,2. Мощность двигателя
NCT,
кВт,
равна
Двигатель
механизма передвижения обычно выбирается
серии MTKF,
МТКН [2,8] таким образом, чтобы отсутствовала
пробуксовка ведущих колес незагруженной
тележки, а коэффициент запаса сцепления
должен быть не менее 1,2. Мощность двигателя
NCT,
кВт,
равна

где VT
- заданная
скорость крана, м/с;![]() =
0,7..0,85 - общий КПД механизма передвижения
[8, т.2, с.423].
=
0,7..0,85 - общий КПД механизма передвижения
[8, т.2, с.423].
При выборе электродвигателя должны соблюдаться некоторые условия:
относительная продолжительность включения (ПВ) двигателя должна соответствовать относительной продолжительности включения механизма;
номинальная мощность двигателя должна быть равна или несколько больше значения мощности
 .
.
Выбираем
электродвигатель переменного тока МТКH
412-6 с параметрами:
![]() ;
;![]() ;
;![]() ;
;
![]() ;
;
![]() ;
;
![]()
Частота вращения колес, об/мин,
Передаточное число редуктора
Выбираем по каталогу
ближайший по полученным данным редуктор
Ц2-400 с ![]() [2,8]. Так как расчетная величина
передаточного числа редуктора не
совпадает с передаточным числом
фактического
редуктора, то фактическая частота
вращения ходового колеса равна:
[2,8]. Так как расчетная величина
передаточного числа редуктора не
совпадает с передаточным числом
фактического
редуктора, то фактическая частота
вращения ходового колеса равна:

Фактическая скорость передвижения грузовой тележки равна, м/с
![]()
Погрешность выбора скорости передвижения тележки , м/с

Погрешность выбора скорости передвижения тележки не должна превышать ±15%. Требуемая мощность электродвигателя, кВт, определяется по формуле

 При
пуске электродвигателя максимальное
допустимое ускорение ненагруженного
крана, при котором обеспечивается
заданный запас сцепления ходового
колеса с рельсом без пробуксовки, равно
[1]
При
пуске электродвигателя максимальное
допустимое ускорение ненагруженного
крана, при котором обеспечивается
заданный запас сцепления ходового
колеса с рельсом без пробуксовки, равно
[1]

где ![]() -
число приводных колес крана;
-
число приводных колес крана; ![]() -
общее число колес крана;
-
общее число колес крана; ![]() - коэффициент сцепления ходового колеса
с рельсом, зависит от места установки
крана(в помещении) [1, с. 393];
- коэффициент сцепления ходового колеса
с рельсом, зависит от места установки
крана(в помещении) [1, с. 393]; ![]() - ускорение свободного падения, м/с².
- ускорение свободного падения, м/с².
Время пуска при максимальном ускорении, с
Момент сопротивления при передвижении крана без груза, Нм,
Необходимый средний пусковой момент электродвигателя, Нм,

Фактический средний пусковой момент электродвигателя равен
![]()
где Ммах
=981 Нм–
максимальный момент выбранного
электродвигателя, Нм;

Оценка среднепускового момента, необходимая для подбора электродвигателя, возможна только при известном значении момента инерции Jдв
(куда должен входить и момент инерции муфты с тормозным шкивом), поэтому вычисление требуемой мощности двигателя приходится производить с помощью формулы (4) и путем последовательных приближений, задаваясь вначале параметрами двигателя, подобранного по статической мощности с учетом сопротивления передвижению крана с номинальным грузом [1, с. 267].
Поэтому для точного подбора электродвигателя необходимо предварительно выбрать муфту и тормоз.
 Выбор
муфты
Выбор
муфты
В механизме передвижения крана расчетный момент муфты определяем по формуле [2, т.2]
![]()
где ![]() - коэффициент, учитывающий степень
ответственности соединения [2,т.2, табл.
V.2.36];
- коэффициент, учитывающий степень
ответственности соединения [2,т.2, табл.
V.2.36]; ![]() - коэффициент режима работы [2, т.2, табл.
V.2.37];
- коэффициент режима работы [2, т.2, табл.
V.2.37]; ![]() - коэффициент углового смещения, который
должен учитываться в соответствии
с ГОСТ 5006-83 для выбора зубчатых муфт
[2,т.2, табл. V.2.38], а для остальных типов
соединительных муфт
- коэффициент углового смещения, который
должен учитываться в соответствии
с ГОСТ 5006-83 для выбора зубчатых муфт
[2,т.2, табл. V.2.38], а для остальных типов
соединительных муфт ![]() =1.
=1.
![]()
 Необходимо
учитывать максимальный кратковременный
момент, развиваемый электродвигателем,
не должен превышать двукратной величины
Мрасч.
По каталогу выбираем упругую
втулочно-пальцевую муфту, соединяющую
электродвигатель с редуктором, с
тормозным шкивом соответствующим
по диаметру выбранному тормозу. Муфта
подбирается по валу электродвигателя
и быстроходному валу редуктора, а также
по крутя-щеему моменту Мрасч.
Муфта имеет следующие параметры J=0,32
кг·м²
Необходимо
учитывать максимальный кратковременный
момент, развиваемый электродвигателем,
не должен превышать двукратной величины
Мрасч.
По каталогу выбираем упругую
втулочно-пальцевую муфту, соединяющую
электродвигатель с редуктором, с
тормозным шкивом соответствующим
по диаметру выбранному тормозу. Муфта
подбирается по валу электродвигателя
и быстроходному валу редуктора, а также
по крутя-щеему моменту Мрасч.
Муфта имеет следующие параметры J=0,32
кг·м²
Муфты типа МЗП или другого типа для соединения выходных концов редуктора с валами приводных колес рассчитываются аналогичным образом.
![]()
Муфты зубчатые (ГОСТ 5006-83) типа II
Определение тормозного момента
В основу определения тормозного момента положено обеспечение соответствующего запаса сцепления приводных ходовых колес с рельсами, т.е. отсутствие юза при торможении грузовой тележки, и расчет ведут для наиболее опасного случая - грузовая тележка без груза.
Максимально допустимую величину замедления при торможении грузовой тележки, м/с², определяют по формуле [1]

Время торможения
равно

Уравнение моментов при торможении грузовой тележки без груза имеет вид
![]()
где Мт
- необходимый тормозной момент, Нм;
![]() -
момент сопротивления передвижению
грузовой тележки без груза при торможении,
Нм;
-
момент сопротивления передвижению
грузовой тележки без груза при торможении,
Нм;
![]() -момент
инерции вращающихся масс механизма при
торможении, Нм;
-момент
инерции вращающихся масс механизма при
торможении, Нм;
![]() -момент
инерции поступательно движущихся масс
тележки при торможении, Нм;
-момент
инерции поступательно движущихся масс
тележки при торможении, Нм;
![]() - момент сопротивления передвижению
грузовой тележки при уклоне
- момент сопротивления передвижению
грузовой тележки при уклоне
подтележечных рельсов, Нм.
Так как при
торможении грузовой тележки трения
реборд может и не происходить, то
коэффициент реборд Кр
при определении ![]() принимаем равным единице.
принимаем равным единице.
Сопротивление передвижению при торможении равно

Уравнение моментов при торможении в развернутом виде


 По
каталогу на тормоза принимаем ближайший
по полученным данным тормоз типа ТКГ-300.
Применение тормозов с гидротолкателями
обеспечивает более плавное торможение,
что особенно важно в механизме
передвижения.
По
каталогу на тормоза принимаем ближайший
по полученным данным тормоз типа ТКГ-300.
Применение тормозов с гидротолкателями
обеспечивает более плавное торможение,
что особенно важно в механизме
передвижения.
Согласно Правилам Госгортехнадзора тормоза в механизмах передвижения устанавливаются в тех случаях, если:
- машина работает на открытом воздухе;
- машина, предназначенная для работы в помещении, передвигается по рельсам, уложенным на полу;
 -
машина (тележка), предназначенная для
работы в помещении на надземном рельсовом
пути перемещается со скоростью более
32 м/мин.
-
машина (тележка), предназначенная для
работы в помещении на надземном рельсовом
пути перемещается со скоростью более
32 м/мин.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1. Александров М.П. Грузоподъемные'машины.- М.: Высш.шк,2000.-552с.
2. Курсовое проектирование грузоподъемных машин / Под ред. С.А.Казака,- М.: Высш. шк., 1989.- 319 с.
3. Правила устройства и безопасной эксплуатации грузоподъемных кранов. Госгортехнадзор России.- НПО ОБТ, 2000.- 239 с.
4. Канаты стальные. Сортамент.- М.: Изд-во стандартов, 1983.- 184 с.
5. Блейшмидт Л.И. Расчет и выбор стальных проволочных канатов для грузоподъемных машин: Метод, указания.- Брянск: БГТУ, 2001,- 18 с.
6. Расчеты крановых механизмов и их деталей.- ВНИИПТМАШ.-М.: 1993.-Т.1.- 187С..Т.2.- 163 с.
7. Подъемно-транспортные машины. Атлас конструкций / Под ред. М.П.Александрова, Д.Н. Решетова.- М.: Машиностроение, 1987.-122 с.
8. Справочник по кранам / Под ред. М:М.Гохберга,- Л.: Машиностроение, 1988.- Т.1.-536 с; Т. 2,- 569 с.
9. Шабашов А.П., Лысяков А.Г. Мостовые краны общего назначения. - М.: Машиностроение, 1980.- 304 с.
10. Цветков В.Д. Проектирование передаточных валов. Метод, указания.-Брянск: БГТУ, 2000.-116 с.
11. Крановое электрооборудование: Справ. / Под ред. А.А.Рабиновича.-М.: Энергия, 1979.-240 с.