

Рассмотрим бесконечно малый промежуток времени Δt → 0, за который твердое тело совершает поворот на бесконечно малый угол Δα вокруг мгновенной оси ω
Предел, к которому стремится отношение Δα / Δt, называется угловой скоростью твердого тела в рассматриваемый момент времени

Угловая скорость является векторной величиной. Вектор угловой скорости ω может быть приложен к любой точке мгновенной оси и направлен в каждый момент времени по мгновенной оси Ω, так, чтобы, смотря навстречу этому вектору, видеть вращение тела происходящим против движения часовой стрелки.
За вектор углового ускорения ε при вращении тела вокруг неподвижной точки принимают вектор, который характеризует изменение угловой скорости ω в данный момент как по числовой величине, так и по направлению. Такой характеристикой является производная по времени от вектора угловой скорости ω. Таким образом, угловое ускорение определяется так:
![]()
В общем случае угловое ускорение не направлено по мгновенной оси, а, как производная по времени от вектора ω, параллельно касательной к годографу этого вектора. Условимся угловое ускорениеε изображать в любой точке прямой, параллельной этой касательной годографа угловой скорости u, но проходящей через неподвижную точку тела (рисунок 3.3). Прямая, по которой направлен вектор углового ускорения, называется осью углового ускорения и обозначается E.
7 вопрос и 8 вопрос Кинематика твёрдого тела. Вращение вокруг неподвижной оси. Угловые скорость и ускорения. Связь между угловыми и линейными скоростями и ускорениями.
Кинематика вращательного движения.
Движение тела может быть как поступательным, так и вращательным. В этом случае тело представляется в виде системы жестко связанных между собой материальных точек.
При поступательном движение любая прямая, проведенная в теле, перемещается параллельно самой себе. По форме траектории поступательное движение может быть прямолинейным и криволинейным. При поступательном движении все точки твердого тела за один и тот же промежуток времени совершают равные по величине и направлению перемещения. Следовательно, скорости и ускорения всех точек тела в любой момент времени также одинаковы. Для описания поступательного движения достаточно определить движение одной точки.
Вращательным движением твёрдого тела вокруг неподвижной оси называется такое движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной прямой (ось вращения).
Ось вращения может проходить через тело или лежать за его пределами. Если ось вращения проходит сквозь тело, то точки, лежащие на оси, при вращении тела остаются в покое. Точки твёрдого тела, находящиеся на разных расстояниях от оси вращения за одинаковые промежутки времени проходят различные расстояния и, следовательно, имеют различные линейные скорости.
При
вращении тела вокруг неподвижной оси
точки тела за один и тот же промежуток
времени совершают одно и тоже угловое
перемещение
![]() .
Модуль
равен углу
поворота тела вокруг оси за время
.
Модуль
равен углу
поворота тела вокруг оси за время
![]() ,
направления вектора углового перемещения
с
направлением вращения тела связано
правилом винта: если совместить
направления вращения винта с направлением
вращения тела, то вектор
будет совпадать с поступательным
движением винта. Вектор
направлен вдоль оси вращения.
,
направления вектора углового перемещения
с
направлением вращения тела связано
правилом винта: если совместить
направления вращения винта с направлением
вращения тела, то вектор
будет совпадать с поступательным
движением винта. Вектор
направлен вдоль оси вращения.
Быстроту изменения углового перемещения определяет угловая скорость - ω. По аналогии с линейной скоростью вводят понятия средней и мгновенной угловой скорости:
![]()
![]()
Угловая скорость - величина векторная.
Быстроту изменения угловой скорости характеризует среднее и мгновенное
угловое ускорение.
![]()
![]()
Вектор![]() и
может совпадать с вектором
и
может совпадать с вектором
![]() ,
и быть противоположным ему
,
и быть противоположным ему
Вращательным наз. такой вид движения при котором каждая т. Твердого тела в процессе своего движения описывает окружность.У.с –наз.величина равная первой производной от угла поворота от времени W=dφ/dt физический смысл у.с. изменение угла поворота за единицу времени у.с. у всех т. Тела будет одинакова [1рад/с] Угловое ускорение(ε) –физическая величина числено равная изменению угловой скорости за единицу времени ε=dw/dt, W=dφ/dt ε=dw/dt=d2φ/dt связь. ε V=Wr at=dv/dt=d/dt(Wr)=r*dw/dt(ε) at=[ε*r] an = V2/r =W2*r2/r an=W2r
9 вопрос Плоскопараллельным (плоским) движением (ППД) твердого тела называется такое движение, при котором все точки тела перемещаются в плоскостях параллельных некоторой неподвижной плоскости (рисунок 2.11).
При таком движении точки, лежащие в разных плоскостях на одном отрезке, перпендикулярном неподвижной плоскости (например M1M2 ) совершают одинаковые движения.

Отрезок M1M2 движется поступательно. Поэтому изучение плоскопараллельного движения сводится к изучению движения плоской фигуры в какой-то плоскости.
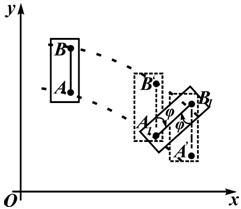
На рисунке 2.12 показано перемещение пластинки в плоской системе отсчета xOy из одного положения в другое. Такое перемещение можно осуществить двигая пластину поступательно с траекторией точки A с последующим поворотом на угол φ вокруг точки A1. Это же перемещение можно выполнить иначе.
Например, перемещая пластинку поступательно с траекторией точки B , с последующим поворотом вокруг B1 на угол φ. Траектории точек A и B различны, а угол поворота в обоих случаях одинаков.
Положение пластинки вполне определяется положением скрепленного с ней отрезка (например AB), закон движения которого можно задать в виде:
xA=xA(t), yA=yA(t), φ=φ(t).
Точка A в этом случае называется полюсом. Если принять за полюс точку B , то получим уравнения:
xB=xB(t), yB=yB(t), φ=φ(t)
За полюс выбирается точка, закон движения которой известен.
10 вопрос Принцип относительности Галилея. Преобразования Галилея. Классическая теорема сложения скоростей. Инвариантность законов Ньютона в инерциальных системах отсчёта.
Принцип относительности Галилея – это принцип физического равноправия инерциальных систем отсчёта в классической механике, проявляющегося в том, что законы механики во всех таких системах одинаковы.
Математически принцип относительности Галилея выражает инвариантность (неизменность) уравнений механики относительно преобразований координат движущихся точек (и времени) при переходе от одной инерциальной системы к другой — преобразований Галилея. Пусть имеются две инерциальные системы отсчёта, одну из которых, S, условимся считать покоящейся; вторая система, S', движется по отношению к S с постоянной скоростью u так, как показано на рисунке. Тогда преобразования Галилея для координат материальной точки в системах S и S' будут иметь вид: x' = x - ut, у' = у, z' = z, t' = t (1) (штрихованные величины относятся к системе S', нештрихованные — к S). Т. о., время в классической механике, как и расстояние между любыми фиксированными точками, считается одинаковым во всех системах отсчёта. Из преобразований Галилея можно получить соотношения между скоростями движения точки и её ускорениями в обеих системах: v' = v - u, (2) a' = a. В классической механике движение материальной точки определяется вторым законом Ньютона: F = ma, (3) где m — масса точки, a F — равнодействующая всех приложенных к ней сил. При этом силы (и массы) являются в классической механике инвариантами, т. е. величинами, не изменяющимися при переходе от одной системы отсчёта к другой. Поэтому при преобразованиях Галилея уравнение (3) не меняется. Это и есть математическое выражение Галилеева принципа относительности.
ПРЕОБРАЗОВАНИЯ ГАЛИЛЕЯ.
В кинематике все системы отсчета равноправны между собой и движение можно описывать в любой из них. При исследовании движений иногда приходится переходить от одной системы отсчета ( с координатной системой ОХУZ) к другой - (О`Х`У`Z`). Рассмотрим случай, когда вторая система отсчета движется относительно первой равномерно и прямолинейно со скоростью V=соnst.
Для облегчения математического описания предположим, что соответствующие оси координат параллельны друг другу, что скорость направлена вдоль оси Х, и что в начальный момент времени (t=0) начала координат обеих систем совпадали друг с другом. Используя справедливое в классической физике допущение об одинаковом течении времени в обеих системах, можно записать соотношения, связывающие координаты некоторой точки А(х,у,z) и А (х`,у`,z`) в обеих системах. Такой переход от одной системы отсчета к другой носит название преобразований Галилея):
ОХУZ О`Х`У`Z`
t = t` t`= t
х = х` + Vxt х` = х - Vxt
y = y` y`= y
z = z` z` = z
x = v`x + Vx v`x = vx - Vx
ax = a`x a`x = ax
Ускорение в обеих системах одинаково (V=соnst). Глубокий смысл преобразований Галилея будет выяснен в динамике. Преобразование скоростей Галилея отражает имеющий место в классической физике принцип независимости перемещений.
Сложение скоростей в СТО
К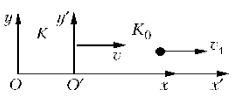 лассический
закон сложения скоростей не может быть
справедлив, т.к. он противоречит
утверждению о постоянстве скорости
света в вакууме. Если поезд движется со
скоростью v
и в вагоне в направлении движения поезда
распространяется световая волна, то ее
скорость относительна Земли все равно
c,
а не v + c.
лассический
закон сложения скоростей не может быть
справедлив, т.к. он противоречит
утверждению о постоянстве скорости
света в вакууме. Если поезд движется со
скоростью v
и в вагоне в направлении движения поезда
распространяется световая волна, то ее
скорость относительна Земли все равно
c,
а не v + c.
Рассмотрим две системы отсчета.
В
системе K0
тело движется со скоростью v1.
Относительно же системы K
оно движется со скоростью v2.
Согласно закону сложения скоростей в
СТО:

Если
v << c
и v1 << c,
то слагаемым
![]() можно
пренебречь, и тогда получим классический
закон сложения скоростей: v2 = v1 + v.
можно
пренебречь, и тогда получим классический
закон сложения скоростей: v2 = v1 + v.
При
v1 = c
скорость v2
равна c,
как этого требует второй постулат теории
относительности:

При v1 = c и при v = c скорость v2 вновь равна скорости c.
Замечательным свойством закона сложения является то, что при любых скоростях v1 и v (не больше c), результирующая скорость v2 не превышает c. Скорость движения реальных тел больше, чем скорость света, невозможна.
Сложение скоростей
При рассмотрении сложного движения (то есть когда точка или тело движутся в одной системе отсчёта, а она движется относительно другой) возникает вопрос о связи скоростей в 2 системах отсчёта.
Классическая механика
В классической механике абсолютная скорость точки равна векторной сумме её относительной и переносной скоростей:
![]()
Простым языком: Скорость движения тела относительно неподвижной системы отсчёта равна векторной сумме скорости этого тела относительно подвижной системы отсчета и скорости самой подвижной системы отсчета относительно неподвижной системы.
12 вопрос Массой тела называется количественная характеристика инертности тела. Масса - скал. величина, обл. свойствами:
-не зависит от скорости движ. тела
-масса – величина аддитивная, т.е. масса системы рана сумме масс материальных тел, входящих в состав этой системы
-при любых воздействиях выполняется закон сохранения массы: суммарная масса взаимодействующих тел до взаимодействия и после равны между собой.
i=1
n

Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и получающимся от этого ускорением этой точки. Фактически, второй закон Ньютона вводит массу, как мерило проявления инерции материальной точки в выбранной инерциальной системе отсчёта (ИСО).
Второй закон Ньютона утверждает, что
В инерциальной системе отсчета ускорение, которое получает материальная точка, прямо пропорционально приложенной к ней силе и обратно пропорционально её массе. При подходящем выборе единиц измерения, этот закон можно записать в виде формулы:
![]()
где
![]() —
ускорение
материальной точки;
—
ускорение
материальной точки;
![]() —
сила,
приложенная к материальной точке; m —
масса
материальной точки.
—
сила,
приложенная к материальной точке; m —
масса
материальной точки.
Или в более известном виде:
![]()
В случае, когда масса материальной точки меняется со временем, второй закон Ньютона формулируется с использованием понятия импульс:
В инерциальной системе отсчета скорость изменения импульса материальной точки равна действующей на неё силе.
![]() где
где
![]() —
импульс
точки,
—
импульс
точки,
![]() где
где
![]() —
скорость
точки; t —
время;
—
скорость
точки; t —
время;
![]() —
производная
импульса по времени.
—
производная
импульса по времени.
Второй закон Ньютона действителен только для скоростей, много меньших скорости света и в инерциальных системах отсчёта. Для скоростей, приближенных к скорости света, используются законы теории относительности.
Третий закон Ньютона. Центр масс. Уравнение движения центра масс.
Третий закон Ньютона утверждает: сила действия равна по модулю и противоположна по направлению силе противодействия.
Сам закон:
Тела действуют друг на друга с силами, имеющими одинаковую природу, направленными вдоль одной и той же прямой, равными по модулю и противоположными по направлению:
![]()
13 вопрос Неинерциальные системы отсчёта. Силы инерции. Принцип эквивалентности. Уравнение движения в неинерциальных системах отсчёта.
Неинерциальная система отсчёта — произвольная система отсчёта, не являющаяся инерциальной. Примеры неинерциальных систем отсчета: система, движущаяся прямолинейно с постоянным ускорением, а также вращающаяся система.
При рассмотрении уравнений движения тела в неинерциальной системе отсчета необходимо учитывать дополнительные силы инерции. Законы Ньютона выполняются только в инерциальных системах отсчёта. Для того чтобы найти уравнение движения в неинерциальной системе отсчёта, нужно знать законы преобразования сил и ускорений при переходе от инерциальной системы к любой неинерциальной.
Классическая механика постулирует следующие два принципа:
время абсолютно, то есть промежутки времени между любыми двумя событиями одинаковы во всех произвольно движущихся системах отсчёта;
пространство абсолютно, то есть расстояние между двумя любыми материальными точками одинаково во всех произвольно движущихся системах отсчёта.
Эти два принципа позволяют записывать уравнение движения материальной точки относительно любой неинерциальной системы отсчёта, в которой не выполняется Первый закон Ньютона.
Основное уравнение динамики относительного движения материальной точки имеет вид:
![]() ,
,
где
![]() —
масса тела,
—
масса тела,
![]() —
ускорение тела относительно неинерциальной
системы отсчёта,
—
сумма всех внешних сил, действующих на
тело,
—
ускорение тела относительно неинерциальной
системы отсчёта,
—
сумма всех внешних сил, действующих на
тело,
![]() —
переносное ускорение тела,
—
переносное ускорение тела,
![]() —
Кориолисово ускорение тела.
—
Кориолисово ускорение тела.
Это уравнение может быть записано в привычной форме Второго закона Ньютона, если ввести фиктивные силы инерции:
![]() —
переносная
сила инерции
—
переносная
сила инерции
![]() —
сила
Кориолиса
—
сила
Кориолиса
Сила инерции — фиктивная сила, которую можно ввести в неинерциальной системе отсчёта так, чтобы законы механики в ней совпадали с законами инерциальных систем.
В математических вычислениях введения этой силы происходит путём преобразования уравнения
F1+F2+…Fn = ma к виду
F1+F2+…Fn–ma = 0 Где Fi — реально действующая сила, а –ma — «сила инерции».
Среди сил инерции выделяют следующие:
простую силу инерции;
центробежную силу, объясняющую стремление тел улететь от центра во вращающихся системах отсчёта;
силу Кориолиса, объясняющую стремление тел сойти с радиуса при радиальном движении во вращающихся системах отсчёта;
С точки зрения общей теории относительности, гравитационные силы в любой точке — это силы инерции в данной точке искривлённого пространства Эйнштейна
Центробежная сила — сила инерции, которую вводят во вращающейся (неинерциальной) системе отсчёта (чтобы применять законы Ньютона, рассчитанные только на инерциальные СО) и которая направлена от оси вращения (отсюда и название).
14 вопрос Закон всемирного тяготения. Гравитационное поле и его характеристики. Потенциал поля. Связь между потенциалом и напряжённостью
Закон всемирного тяготения был открыт англичанином И. Ньютоном в 1666г. Закон звучит следующим образом: сила гравитационного притяжения двух материальных точек прямо пропорциональна произведению их масс и обратно пропорциональна квадрату расстояния между ними. В виде формулы это записывается так: F=G*m1*m2/r2 где G — гравитационная константа, определяемая экспериментально 6,67 × 10–11 Н·м2/кг2
ГРАВИТАЦИОННОЕ ПОЛЕ (поле тяготения), один из видов поля физического, посредством которого осуществляется гравитационное взаимодействие (притяжение) тел.
Гравитационное взаимодействие осуществляется через гравитационное поле. Всякое тело изменяет свойства окружающего его пространства — создает в нем гравитационное поле. Это поле проявляет себя в том, что помещенное в него другое тело оказывается под действием силы. Об «интенсивности» гравитационного поля, очевидно, можно судить по величине силы, действующей в данной точке на тело с массой, равной единице. В соответствии с этим величину называют Напряженностью гравитационного поля.
G=F/m
Величину φ=U/m’ называют потенциалом гравитационного поля. В этой формуле U есть потенциальная энергия, которой обладает материальная точка массы m’ в данной точке поля.
Потенциал
– скалярная величина, поэтому пользоваться
и вычислять φ проще, чем
![]() .
.
Формулу
![]() можно
использовать для установления единиц
потенциала: за
единицу φ
принимают потенциал в такой точке поля,
для перемещения в которую из бесконечности
единичного положительного заряда
необходимо совершить работу равную
единице.
можно
использовать для установления единиц
потенциала: за
единицу φ
принимают потенциал в такой точке поля,
для перемещения в которую из бесконечности
единичного положительного заряда
необходимо совершить работу равную
единице.
В физике часто используется единица энергии и работы, называемая электрон - вольт (эВ) – это работа, совершенная силами поля над зарядом, равным заряду электрона при прохождении им разности потенциалов 1 В.
17 и 18 вопрос Закон сохранения импульса. Реактивное движение. Движение тела с переменной массой.
Замкнутой наз. система на которую не действуют внешние силы или векторная сумма всех внешних сил =0. импульс p замкнутой системы не изменяется с течением времени, т.е. dp/dt=0 и p=const. В отличие от законов Ньютона, з.сохр. импульса справедлив не только в рамках классической механики. Он принадлежит к числу самых основных физических законов, т.к. связан с определенным свойством симметрии пространства – его однородностью. Однородность пространства проявляется в том, что физические свойства замкнутой системы и законы ее движения не зависят от выбора положения начала координат инерциальной системы отсчета, т.е. не изменяются при параллельном переносе в пространстве замкнутой системы отсчета как целого. Согласно современным представлениям импульсом могут обладать не только частицы и тела, но также и поля. Если система не замкнутая, но действующие на нее внешние силы таковы, что их равнодействующая равна 0, то, согласно законам Ньютона, импульс системы не изменяется с течением времени (p=const).
Закон сохранения импульса является следствием второго и третьего законов Ньютона. Он имеет место в изолированной (замкнутой) системе тел.
Такой системой называется механическая система, на каждое из тел которой не действуют внешние силы. В изолированной системе проявляются внутренние силы, т.е. силы взаимодействия между телами, входящими в систему.
Так
как в замкнутой системе внешние силы
отсутствуют, то![]()
Или
![]()
|
|
Это равенство выражает закон сохранения импульса, согласно которому полный вектор импульса замкнутой системы тел с течением времени не изменяется.
Т.к.
![]() ,
то при любых процессах, происходящих в
замкнутой системе, скорость ее центра
инерции сохраняется неизменной.
,
то при любых процессах, происходящих в
замкнутой системе, скорость ее центра
инерции сохраняется неизменной.
Реактивное движение.
Движение тела, возникающее вследствие отделения от него части его массы с некоторой скоростью, называют реактивным. Все виды движения, кроме реактивного, невозможны без наличия внешних для данной системы сил, т. е. без взаимодействия тел данной системы с окружающей средой, а для осуществления реактивного движения не требуется взаимодействия тела с окружающей средой. Первоначально система покоится, т. е. ее полный импульс равен нулю. Когда из системы начинает выбрасываться с некоторой скоростью часть ее массы, то (так как полный импульс замкнутой системы по закону сохранения импульса должен оставаться неизменным) система получает скорость, направленную в противоположную сторону. Действительно, так как m1v1+m2v2=0, то m1v1=-m2v2, т. е. v2=-v1m1/m2.
Из этой формулы следует, что скорость v2, получаемая системой с массой m2, зависит от выброшенной массы m1 и скорости v1 ее выбрасывания.
Тепловой двигатель, в котором сила тяги, возникающая за счет реакции струи вылетающих раскаленных газов, приложена непосредственно к его корпусу, называют реактивным. В отличие от других транспортных средств устройство с реактивным двигателем может двигаться в космическом пространстве.
Движение тел с переменной массой.
Уравнение Мещерского.
 ,
где
vотн- скорость истечения топлива
относительно ракеты;
v - скорость
движения ракеты;
m - масса ракеты в
данный момент времени.
,
где
vотн- скорость истечения топлива
относительно ракеты;
v - скорость
движения ракеты;
m - масса ракеты в
данный момент времени.
Формула
Циолковского.
 m0 - масса ракеты в момент старта.
m0 - масса ракеты в момент старта.
19 вопрос
Первая космическая скорость
Для осуществления
равномерного движения по окружности
радиуса r его горизонтально направленная
скорость должна иметь такое значение
v, при котором центростремительное
ускорение равно ускорению свободного
падения
![]() (1).
Из
(1) следует:
(1).
Из
(1) следует:
![]() (2).
Скорость
V, при которой тело может двигаться по
круговой орбите вокруг Земли, называется
первой космической скоростью.
Из
формулы (2) для значения r, равного радиусу
Земли, r = 6371 км, первая космическая
скорость равна
V = 7.9*103
м/с
При начальной скорости меньше
7,9 км/с тело, брошенное горизонтально,
пролетев некоторое расстояние, упадет
на поверхность Земли. При скорости 7,9
км/с в отсутствии воздуха оно будет
двигаться вокруг Земли по окружности,
став ее искусственным спутником.
Вторая
космическая скорость
При
небольшом превышении первой космической
скорости орбита спутника будет
эллиптической, а при достижении скорости
11,2 км/с превращается в параболу, ветви
которой уходят в бесконечность.
Скорость,
при которой тело способно преодолеть
действия сил притяжения небесного тела
и удалиться от него на бесконечно далекое
расстояние, называется второй космической
скоростью.
Из формулы (2) следует, что
для вычисления первой космической
скорости на расстоянии r от любого
небесного тела, звезды или планеты,
нужно знать ускорения a свободного
падения на этом расстоянии от центра
масс небесного тела. Небесное тело
массой M действует на другое тело массой
m на расстоянии r силой всемирного
тяготения F.
Следовательно, ускорение
свободного падения тела на этом расстоянии
равно
(2).
Скорость
V, при которой тело может двигаться по
круговой орбите вокруг Земли, называется
первой космической скоростью.
Из
формулы (2) для значения r, равного радиусу
Земли, r = 6371 км, первая космическая
скорость равна
V = 7.9*103
м/с
При начальной скорости меньше
7,9 км/с тело, брошенное горизонтально,
пролетев некоторое расстояние, упадет
на поверхность Земли. При скорости 7,9
км/с в отсутствии воздуха оно будет
двигаться вокруг Земли по окружности,
став ее искусственным спутником.
Вторая
космическая скорость
При
небольшом превышении первой космической
скорости орбита спутника будет
эллиптической, а при достижении скорости
11,2 км/с превращается в параболу, ветви
которой уходят в бесконечность.
Скорость,
при которой тело способно преодолеть
действия сил притяжения небесного тела
и удалиться от него на бесконечно далекое
расстояние, называется второй космической
скоростью.
Из формулы (2) следует, что
для вычисления первой космической
скорости на расстоянии r от любого
небесного тела, звезды или планеты,
нужно знать ускорения a свободного
падения на этом расстоянии от центра
масс небесного тела. Небесное тело
массой M действует на другое тело массой
m на расстоянии r силой всемирного
тяготения F.
Следовательно, ускорение
свободного падения тела на этом расстоянии
равно
![]() (3).
Из
(2) и (3) первая космическая скорость V на
расстоянии r от центра небесного тела
массой M равна:
(3).
Из
(2) и (3) первая космическая скорость V на
расстоянии r от центра небесного тела
массой M равна:
![]() (4).
Формула
(4) позволяет вычислять массы небесных
тел, вокруг которых обращаются другие
небесные тела под действием сил всемирного
тяготения.
Массу M Солнца можно найти
по известным значениям скорости V
движениям Земли по ее орбите и радиусу
r земной орбиты:
(4).
Формула
(4) позволяет вычислять массы небесных
тел, вокруг которых обращаются другие
небесные тела под действием сил всемирного
тяготения.
Массу M Солнца можно найти
по известным значениям скорости V
движениям Земли по ее орбите и радиусу
r земной орбиты:
![]()
![]() Скорость
V движения Земли по орбите можно найти,
зная радиус r земной орбиты и период Т
ее обращения вокруг Солнца:
Скорость
V движения Земли по орбите можно найти,
зная радиус r земной орбиты и период Т
ее обращения вокруг Солнца:
![]() Для
вычисления массы Солнца получаем
формулу:
Для
вычисления массы Солнца получаем
формулу:
![]() (5).
Выразим
период обращения Земли вокруг Солнца
в единицах СИ:
T = 1 год = 3.16*107
с
Подставим числовые значения величин,
найдем массу Солнца:
M = 2*1030
к
Из формулы (5) следует, что для всех
спутников, обращающихся по круговым
орбитам вокруг одной планеты, или для
всех планет, обращающихся вокруг одной
звезды, отношение квадратов периодов
обращения к кубам радиусов орбит является
величиной одинаковой
(5).
Выразим
период обращения Земли вокруг Солнца
в единицах СИ:
T = 1 год = 3.16*107
с
Подставим числовые значения величин,
найдем массу Солнца:
M = 2*1030
к
Из формулы (5) следует, что для всех
спутников, обращающихся по круговым
орбитам вокруг одной планеты, или для
всех планет, обращающихся вокруг одной
звезды, отношение квадратов периодов
обращения к кубам радиусов орбит является
величиной одинаковой
![]() (6).
Равенство
(6) выполняется и в случае движения
спутников или планет по эллиптическим
орбитам, если использовать как r большие
полуоси эллипсов.
Тре́тья
косми́ческая ско́рость —
минимальная скорость, которую необходимо
сообщить находящемуся вблизи
поверхности Земли телу,
чтобы оно могло преодолеть гравитационное
притяжение Земли и Солнца и
покинуть пределы Солнечной
системы[1][2].
(6).
Равенство
(6) выполняется и в случае движения
спутников или планет по эллиптическим
орбитам, если использовать как r большие
полуоси эллипсов.
Тре́тья
косми́ческая ско́рость —
минимальная скорость, которую необходимо
сообщить находящемуся вблизи
поверхности Земли телу,
чтобы оно могло преодолеть гравитационное
притяжение Земли и Солнца и
покинуть пределы Солнечной
системы[1][2].
При старте с Земли, наилучшим образом используя осевое вращение и орбитальное движение планеты, космический аппарат может достичь третьей космической скорости уже при 16,6 км/с[2] относительно Земли, а при старте в самом неблагоприятном направлении его необходимо будет разогнать до 72,8 км/с[источник не указан 155 дней]. Для исключения влияния атмосферного сопротивления предполагается, что космический аппарат приобретает эту скорость за пределами атмосферы Земли. Наиболее энергетически выгодный старт для достижения третьей космической скорости должен осуществляться вблизи экватора, движение объекта должно быть сонаправлено осевому вращению Земли и орбитальному движению Земли вокруг Солнца.
Траектория аппарата, достигшего третьей космической скорости, будет частью дуги параболы (скорость убывает к нулю асимптотически).
20 вопрос
Работа постоянной и переменной сил. Мощность.
[ Назад ]
A = |F|·|S|·cosa = (F·S) Работа постоянной силы равняется скалярному произведению силы на перемещение. Единица измерения работы - Джоуль. 1 Дж = 1 Н·м. Работа переменной силы Пусть тело движется прямолинейно с равномерной силой под углом £ к направлению перемещения и проходит расстояние S/ Работой силы F называется скалярная физическая величина, равная скалярному произведению вектора силы на вектора перемещения. A=F·s·cos £. А=0, если F=0, S=0, £=90º. Если сила непостоянная (изменяется), то для нахождения работы следует разбивать траекторию на отдельные участки. Разбиение можно производить до тех пор, пока движение не станет прямолинейным, а сила постоянной │dr│=ds.. Работа, совершенная силой на данном участке определяется по представленной формуле dA=F· dS· cos £= = │F│·│dr│· cos £=(F;dr)=Ft·dS A=F·S· cos £=Ft·S . Таким образом работа переменной силы на участке траектории равна сумме элементарных работ на отдельных малых участках пути A=SdA=SFt·dS= =S(F·dr). Мощность — физическая величина, равная отношению работы, выполняемой за некоторый промежуток времени, к этому промежутку времени. P=(A2-A1)/(t2-t1)-средняя мощность P=dA/dt -мгновенная мощность.
Консервативные силы (физика)
В динамике консервати́вные си́лы (потенциальные силы) — силы, работа которых не зависит от формы траектории(зависит только от начальной и конечной точки приложения сил). Альтернативное определение: консервативные силы — такие силы, работа по замкнутой траектории которых равна 0.
Для консервативных сил выполняются следующие тождества:
![]() —
ротор
консервативных сил равен 0
—
ротор
консервативных сил равен 0
![]() —
работа
консервативных сил по замкнутому контуру
C равна 0
—
работа
консервативных сил по замкнутому контуру
C равна 0
![]() —
консервативная
сила являются градиентом некой скалярной
функции U, называемой потенциальной
энергией.
—
консервативная
сила являются градиентом некой скалярной
функции U, называемой потенциальной
энергией.
В школьной программе по физике силы разделяют на консервативные и неконсервативные. Примером консервативных сил являются: сила тяжести, сила Архимеда, сила упругости. Примером неконсервативных сил является сила трения.
22 вопрос
Потенциальная энергия. Виды потенциальной энергии. Связь силы и потенциальной энергии.
Потенциальная энергия. Рассмотрение примеров взаимодействия тел силами тяготения и силами упругости позволяет обнаружить следующие признаки потенциальной энергии:
Потенциальной энергией не может обладать одно тело, не взаимодействующее с другими телами. Потенциальная энергия — это энергия взаимодействия тел.
Потенциальная энергия поднятого над Землей тела — это энергия взаимодействия тела и Земли гравитационными силами. Потенциальная энергия упруго деформированного тела — это энергия взаимодействия отдельных частей тела между собой силами упругости.
Связь силы и потенциальной энергии
Каждой
точке потенциального поля соответствует,
с одной стороны, некоторое значение
вектора силы
![]() ,
действующей на тело, и, с другой стороны,
некоторое значение потенциальной
энергии
,
действующей на тело, и, с другой стороны,
некоторое значение потенциальной
энергии
![]() .
Следовательно, между силой и потенциальной
энергией должна существовать определенная
связь.
.
Следовательно, между силой и потенциальной
энергией должна существовать определенная
связь.

Для
установления этой связи вычислим
элементарную работу
![]() ,
совершаемую силами поля при малом
перемещении
,
совершаемую силами поля при малом
перемещении
![]() тела,
происходящем вдоль произвольно выбранного
направления в пространстве, которое
обозначим буквой
тела,
происходящем вдоль произвольно выбранного
направления в пространстве, которое
обозначим буквой
![]() .
Эта работа равна
.
Эта работа равна
![]()
где
![]() -
проекция силы
на
направление
.
-
проекция силы
на
направление
.
Поскольку
в данном случае работа совершается за
счет запаса потенциальной энергии
,
она равна убыли потенциальной энергии
![]() на
отрезке оси
:
на
отрезке оси
:
![]()
Из двух последних выражений получаем
![]()
Откуда
![]()
Последнее выражение дает среднее значение на отрезке . Чтобы
получить значение в точке нужно произвести предельный переход:
![]()
Так как может изменяться не только при перемещении вдоль оси , но также и при перемещениях вдоль других направлений, предел в этой формул представляет собой так называемую частную производную от по :
![]()
Это соотношение справедливо для любого направления в пространстве, в частности и для направлений декартовых координатных осей х, у, z:
![]()
Эта формула определяет проекции вектора силы на координатные оси. Если известны эти проекции, оказывается определенным и сам вектор силы:

в
математике вектор
 ,
,
где
а - скалярная функция х, у, z, называется
градиентом этого скаляра обозначается
символом
![]() .
Следовательно,
сила равна градиенту потенциальной
энергии, взятого с обратным знаком
.
Следовательно,
сила равна градиенту потенциальной
энергии, взятого с обратным знаком
|