Билет 4. Классификация систем управления по различным характерным признакам.
По количеству регулируемых координат:
- одномерные системы управления.
Имеют 1 вход и 1 выход.
- многомерные системы управления.
Имеют несколько входов и выходов. В зависимости от влияния координат друг на друга они делятся на: несвязные и многосвязные.
По характеру изменения параметров во времени:
- стационарные системы.
Такие системы описываются уравнениями, с параметрами не зависящими от времени.
- нестационарные системы.
Такие системы описываются уравнениями, с параметрами зависящими от времени.
По распределению параметров в пространстве:
- системы с распределенными параметрами.
Такие системы описываются дифференциальными уравнениями частных производных.
- системы с сосредоточенными параметрами.
Такие системы описываются обыкновенными дифференциальными уравнениями.
По степени идеализации материальной модели:
- линейные системы.
Такие системы описываются линейными алгебраическими и дифференциальными уравнениями.
- нелинейные системы.
Такие системы описываются нелинейными алгебраическими уравнениями.
По соотношению сигнал-шум:
- детерминированные системы.
В них отсутствует или не учитывается влияние шума в передаваемой информации.
- стахастические системы.
Обычно работают при высоком уровне шума.
Билет 11. Виды соединения статических элементов и их описание (графическое и аналитическое).
1) Системы управления с параллельным соединением статических элементов.

Аналитическое описание: f(x)=f1(x)+f2(x), y(x) = y1(x)+y2(x)=f1(x)+f2(x)
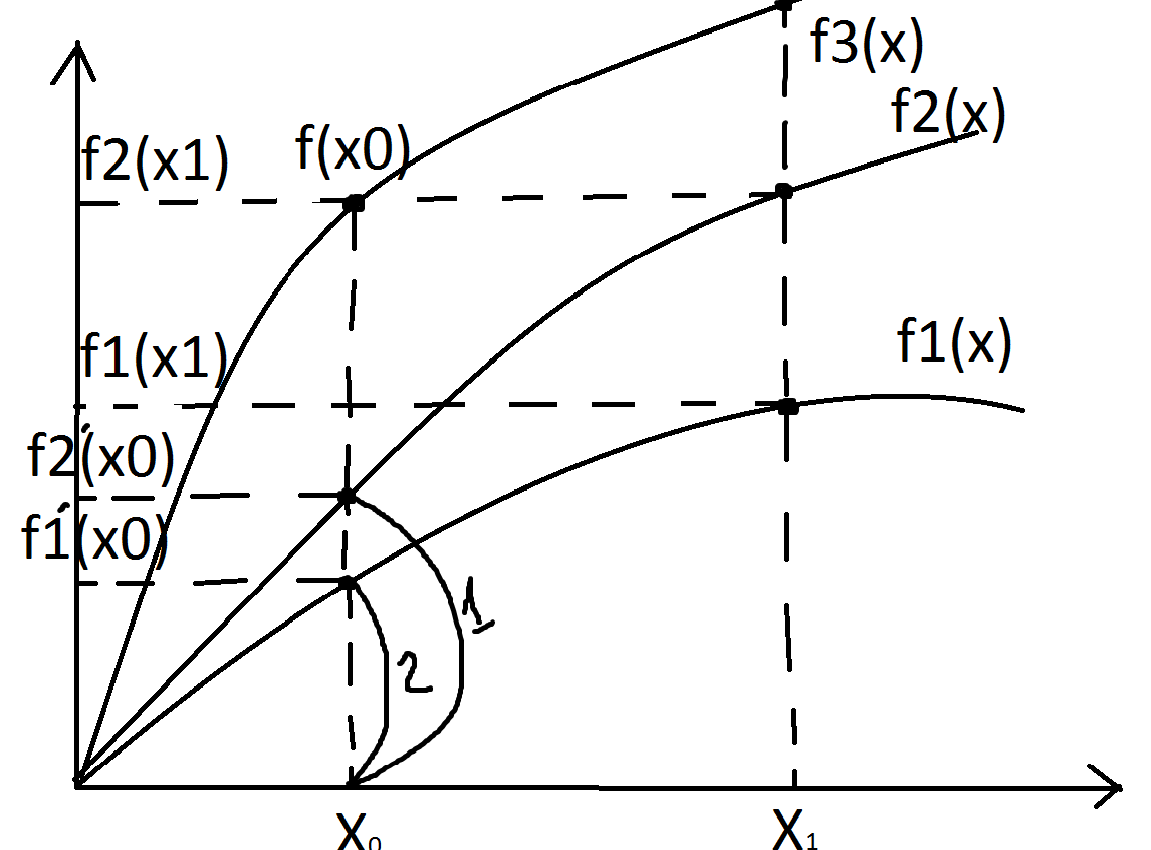
На графике показаны переходные процессы.
2) Системы управления с последовательным соединением статических элементов.

Аналитическое описание: f(x)=f2(y1)=f2(f1(x)), y(x)=f2(f1(x))

3) При включении в систему управления нелинейных элементов, данные элементы при вычислении выходной функции нельзя переставлять местами

Аналитическое описание: f1(f2(x)) ≠ f2(f1(x))
4) Системы управления с обратной связью.
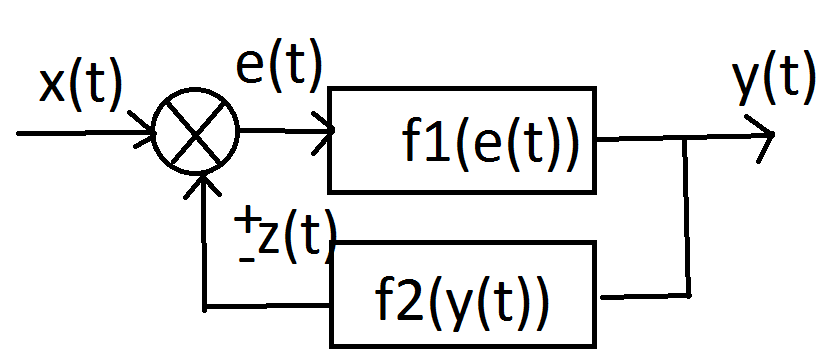
Аналитическое описание (через систему уравнений):
e(t) = x(t)+-z(t)
y(t) = f1(e(t))
z(t) = f2(y(t))
График y=f(x) для системы с обратной отрицательной связью.
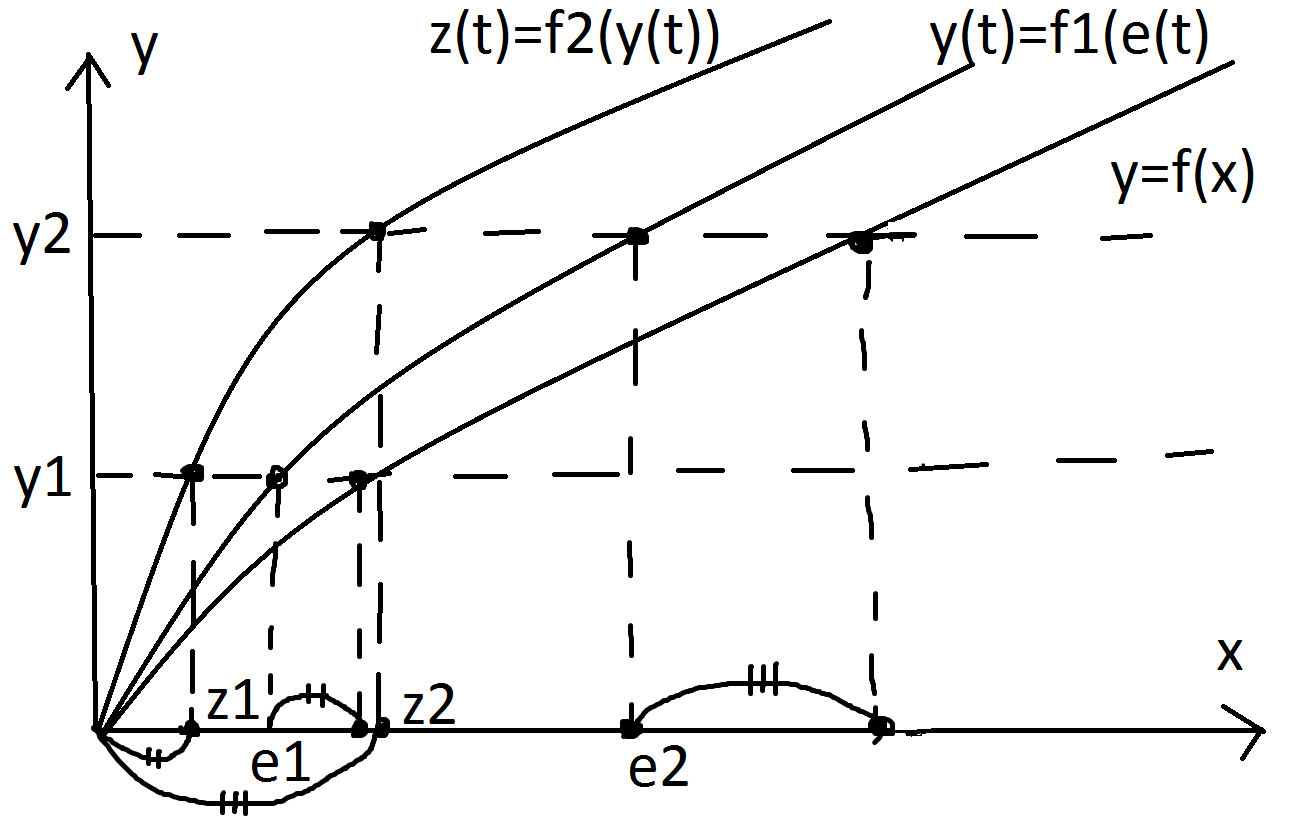
Для построения системы управления с обратной положительной связью алгоритм тот же, только z1 и z2 откладываем влево от ошибок e1 и e2.
Билет 12. Линеализация статических элементов.
Линеализацию обычно производят для упрощения отображения материальной модели данной системы при каких-либо расчетах. При рассмотрении любой системы управления, каждый элемент системы имеют свою рабочую область изменения входных и выходных параметров, причем, некоторые параметры из этой области более предпочтительны для нормальной работы элементов. Например, параметры, характеризующие точки равновесия систем, или параметры точек самоудаленных границ рабочей области – номинальные точки. Их координаты: xn, yn.
При слабой нелинейности статической характеристики достаточно иметь одну номинальную точку.
Сильная нелинейность заставляет разбивать область работоспособности элемента на подобласти, каждую со своими номинальными регионами.
Линеализация – это замена реальных нелинейных уравнений, описывающих функционирование объекта, близкими к нему линейными уравнениями.
Линеализация в окрестности номинальной точки обычно выполняется по форме разложения в ряд Тейлора:

Ряд Тейлора:
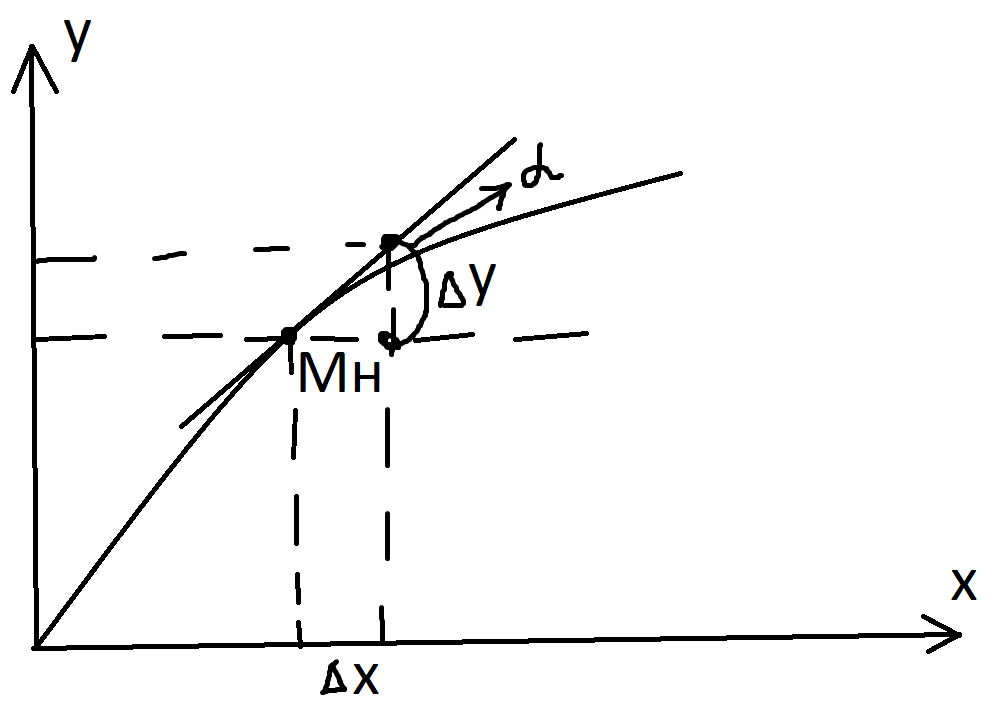
Линеализацию в усеченном виде в конкретной точке (номинальной) можно произвести с помощью построения касательной в этой точке и посчитать через приращение аргумента и функции.
Δy = y-yн
Δx = x – xн
Δy/Δx = kусил. = tg α