

10 Определение передаточных чисел четырех типовых планетарных редукторов
10.1 Определение передаточного числа планетарного редукторов с двумя внешними зацеплениями
Р исунок
31
исунок
31
1 – неподвижное звено;
2, 3 – блок сателлитов;
4 – подвижное колесо;
Н – водило;
А5- кинематическая пара пятого класса, низшая;
D5- кинематическая пара пятого класса, низшая;
N5- кинематическая пара пятого класса, низшая;
С4- кинематическая пара четвертого класса, высшая;
В4- кинематическая пара четвертого класса, высшая;
10.1.1 Определяем степень подвижности
![]() (53)
(53)
гдеn=3
р5=3
р4=2
![]()
Если степень подвижности равна единицы, то данный редуктор является планетарным.
10.1.2 Определяем передаточное отношение от подвижного колеса к водилу
Верхний индекс показывает, какое звено неподвижно.
 Мысленно остановить водило, и заменить
неподвижное колесо подвижным. Теперь
следует определять от подвижного колеса
к тому колесу, которое было неподвижным.
Полученный результат нужно вычесть из
единицы.
Мысленно остановить водило, и заменить
неподвижное колесо подвижным. Теперь
следует определять от подвижного колеса
к тому колесу, которое было неподвижным.
Полученный результат нужно вычесть из
единицы.
![]() (54)
(54)
где m– число внешних зацеплений;
UH41– передаточное отношение от 4 к 1 колесу
![]() (55)
(55)
где U4.3– передаточное отношение от 4 к 3 колесу
U21– передаточное отношение от 2 к 1 колесу
m=2
![]() (56)
(56)
где Z3– число зубьев третьего сателлита;
Z4– число зубьев подвижного колеса 4;
Z3=19
Z4=45
![]()
![]() (57)
(57)
где Z1– число зубьев неподвижного колеса 1;
Z4– число зубьев подвижного колеса 4;
Z1=47
Z2=18
![]()
![]()
![]()
10.1.3 Определяем передаточное отношение от водила к подвижному колесу
Искомое передаточное отношение обратное передаточному отношению от подвижного колеса к водилу. Следовательно, нужно 1 поделить на передаточное отношение от подвижного колеса к водилу.
![]() (58)
(58)
![]()
 10.2
Определение передаточного числа
планетарного редуктора с одним внешними
и одним внутренним зацеплениями
10.2
Определение передаточного числа
планетарного редуктора с одним внешними
и одним внутренним зацеплениями
Рисунок 32
1 – неподвижное звено;
2, 3 – блок сотилитов;
4 – подвижное колесо;
Н – водило;
А5- кинематическая пара пятого класса, низшая;
D5- кинематическая пара пятого класса, низшая;
N5- кинематическая пара пятого класса, низшая;
С4- кинематическая пара пятого класса, высшая;
В4- кинематическая пара пятого класса, высшая;
10.2.1 Определяем степень подвижности
![]()
гдеn=3
р5=3
р4=2
![]()
10.2.2 Определяем передаточное отношение от подвижного колеса к водилу
![]() (59)
(59)
где m– число внешних зацеплений;
UH41– передаточное отношение от 4 к 1 колесу
![]() (60)
(60)
где U4.3– передаточное отношение от 4 к 3 колесу
U21– передаточное отношение от 2 к 1 колесу
m=1
![]() (61)
(61)
где Z3– число зубьев третьего сателлита;
Z4– число зубьев подвижного колеса 4;
Z3=19
Z4=45
![]()
![]() (62)
(62)
где Z1– число зубьев неподвижного колеса 1;
Z4– число зубьев подвижного колеса 4;
Z1=47
Z2=18
![]()
![]()
![]()
10.2.2 Определяем передаточное отношение от водила к подвижному колесу
![]() (63)
(63)
![]()
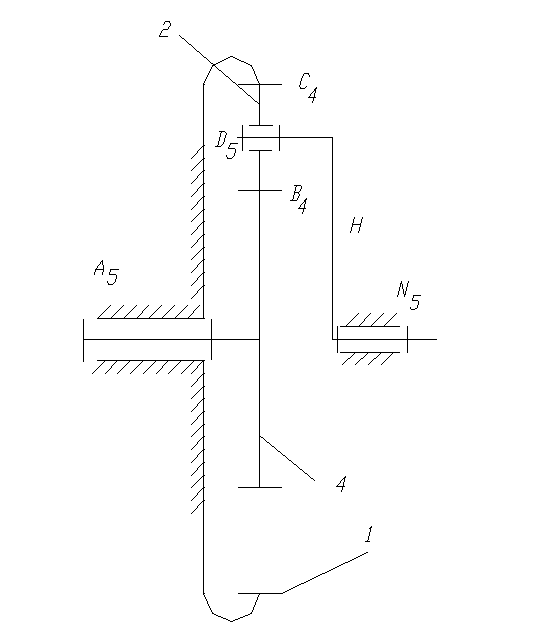
10.3 Определение передаточного числа планетарного редукторов с двумя внутренним зацеплениями
Р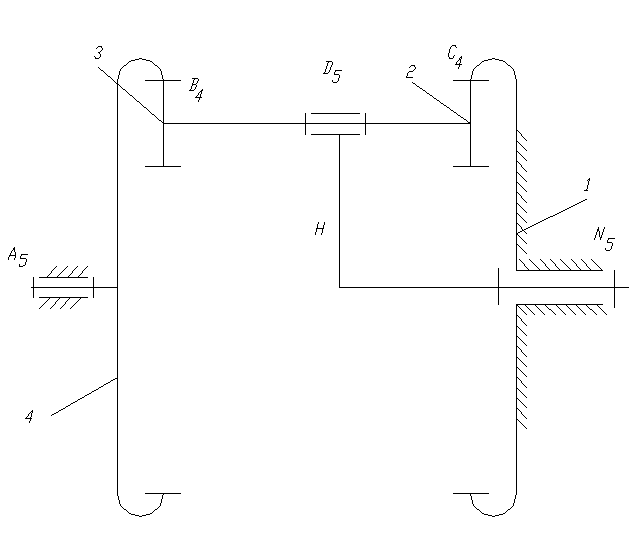 исунок
33
исунок
33
1 – неподвижное звено;
2, 3 – блок сателлитов;
4 – подвижное колесо;
Н – водило;
А5- кинематическая пара пятого класса, низшая;
D5- кинематическая пара пятого класса, низшая;
N5- кинематическая пара пятого класса, низшая;
С4- кинематическая пара четвертого класса, высшая;
В4- кинематическая пара четвертого класса, высшая;
10.3.1 Определяем степень подвижности
![]()
гдеn=3
р5=3
р4=2
![]()
10.3.2 Определяем передаточное отношение от подвижного колеса к водилу
![]() (64)
(64)
где m– число внешних зацеплений;
UH41– передаточное отношение от 4 к 1 колесу
![]() (65)
(65)
где U4.3– передаточное отношение от 4 к 3 колесу
U21– передаточное отношение от 2 к 1 колесу
m=0
![]() (66)
(66)
где Z3– число зубьев третьего сателлита;
Z4– число зубьев подвижного колеса 4;
Z3=18
Z4=59
![]()
![]() (67)
(67)
где Z1– число зубьев неподвижного колеса 1;
Z4– число зубьев подвижного колеса 4;
Z1=60
Z2=19
![]()
![]()
![]()
10.3.3 Определяем передаточное отношение от водила к подвижному колесу
![]() (68)
(68)
![]()
 10.4
Определение передаточного числа
планетарного редукторов с внутренним
зацеплением и паразитным колесом
10.4
Определение передаточного числа
планетарного редукторов с внутренним
зацеплением и паразитным колесом
1 – неподвижное звено;
2 – сателлит;
4 – подвижное колесо;
Н – водило;
А5- кинематическая пара пятого класса, низшая;
D5- кинематическая пара пятого класса, низшая;
N5- кинематическая пара пятого класса, низшая;
С4- кинематическая пара четвертого класса, высшая;
В4- кинематическая пара четвертого класса, высшая;
10.4.1 Определяем степень подвижности
![]()
гдеn=3
р5=3
р4=2
![]()
10.4.2 Определяем передаточное отношение от подвижного колеса к водилу
![]() (69)
(69)
где m– число внешних зацеплений;
UH41– передаточное отношение от 4 к 1 колесу
![]() (70)
(70)
где U4.2– передаточное отношение от 4 ко 2 колесу
U21– передаточное отношение от 2 к 1 колесу
m=1
![]() (71)
(71)
где Z2– число зубьев сателлита;
Z4– число зубьев подвижного колеса 4;
Z2=20
Z4=25
![]()
![]() (72)
(72)
где Z1– число зубьев неподвижного колеса 1;
Z4– число зубьев подвижного колеса 4;
Z1=65
Z2=20
![]()
![]()
![]()
10.4.3 Определяем передаточное отношение от водила к подвижному колесу
![]() (73)
(73)
![]()