

8 Расчет ведущего звена
8.1 Схема нагрузки сил на кривошип
8.1.1 Для этого надо отсоединить ведущие звено от стойки, а действие стойки заменить реакцией

Рисунок 24
Так как мы не знаем направление и линию действия реакции первоначально их задаем произвольно.
8.1.2 Приложим к звену все известные силы
8.1.2.1 Сила тяжести кривошипа
![]() (43)
(43)
где m1=937 кг /с. 2/
q=9,81 м/с2
![]()
8.1.2.2 Сила инерции кривошипа
![]() (44)
(44)
где аS1– ускорение центра масс кривошипа
аS1=а0
а0– ускорение кривошипа в точке 0
а0=0
аS1=0
![]()
Данная сила будет отсутствовать
8.1.2.3 Момент инерции кривошипа
![]() (45)
(45)
где 1 – угловое ускорение кривошипа
1=0
![]()
Данный момент будет отсутствовать
Рисунок 25
8.1.3 Приложим к ведущему звену силу реакции группы Ассура
![]() (46)
(46)
R12=16214000 /с.28/
Она будет равняться по величине, но направлена в противоположную сторону (Рисунок 26 ).

Рисунок 26
8.1.4 Приложим неизвестную силу
Направление и линию действия этой силы Рур мы незнаем. Приложим эту силу в любой точке кроме оси вращения кривошипа. Для удобства приложим ее в конце кривошипа под прямым углом к нему (Рисунок 27).
Рисунок 27 – схема нагрузки сил на кривошип в заданном положении для расчета
8.2 Найдем сумму моментов всех сил относительно точки О
![]() (47)
(47)
где h21 – плече силы R21 относительно точки 0, мм
АО=41,5мм /с. 4/
R21=16214000Н /с.30/
h21=41,2мм
![]() (48)
(48)
![]()
8.3 Составляем векторное уравнение
![]() (49)
(49)
R01 – сила с которой стойка действует на кривошип, Н
R21=16214000Н /с.30/
G1=9192Н /с. 29/
8.4 Выбираем масштаб
![]()
8.5 Определяем длины векторов всех сил на графике
![]() (50)
(50)
где Р=100000 Н/мм
Численные значения длин векторов сил на графике приведены в таблице 7
Таблица 7
|
ZХ |
R12 |
Рур |
G1 |
|
Значение, Н |
16214000 |
16096790 |
9192 |
|
N, мм |
162,14 |
160,9 |
0.09 |
Строим график данного векторного уравнения и найдем R01
Для этого на ватмане возьмем произвольную точку. Начинаем переносить вектора с этой точки. Переносим все векторы параллельно самим себе друг за другом. Для нахождения вектора R01 соединяем линией конец последнего вектора с начальной точкой. Указываем направление. (Рисунок 28).

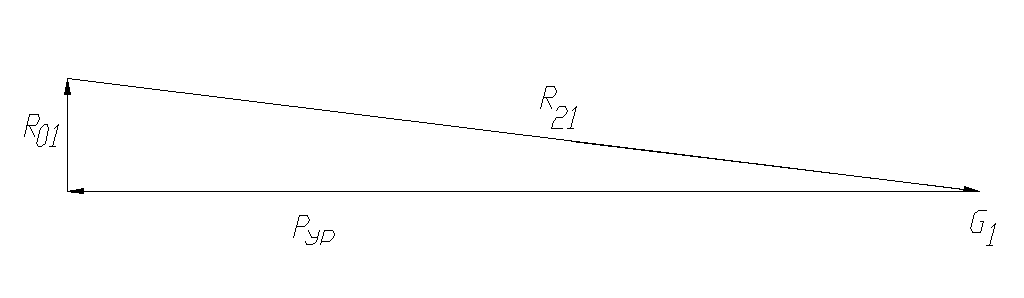
Рисунок 28
8.6 Определяем численное значение силы R01
![]()
![]() (51)
(51)
где D – длина вектора R01 на графике
D=19,58мм
Р=100000Н/мм /с. 32/
![]()
9Рычаг Жуковского
9.1 Строим схему нагрузки сил на механизм в заданном положении для расчета
Момент инерции заменяем парой сил.
Надо обращать внимание на верность направление этих сил.
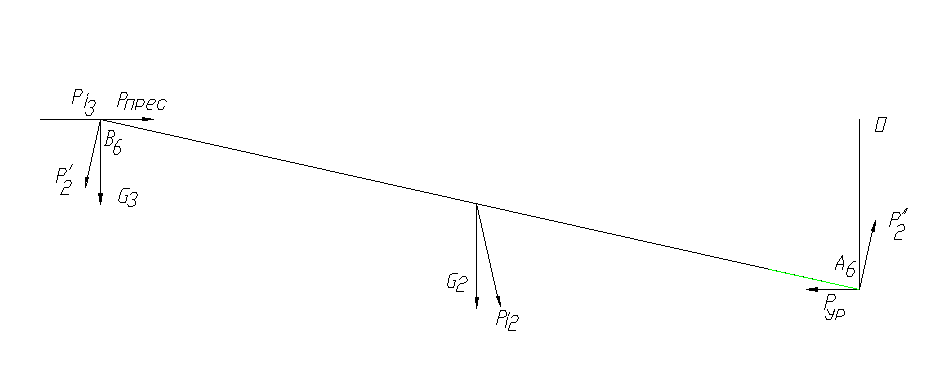
Рисунок 29
9.2 Построения сил на плане скорости
Берем план скорости для заданного положения механизма для расчета и поворачиваем его на 900. Теперь все силы параллельно самим себе переносим со схемы нагрузки сил на механизм в соответствующие точки (a и b) плана скоростей (Рисунок 30) .
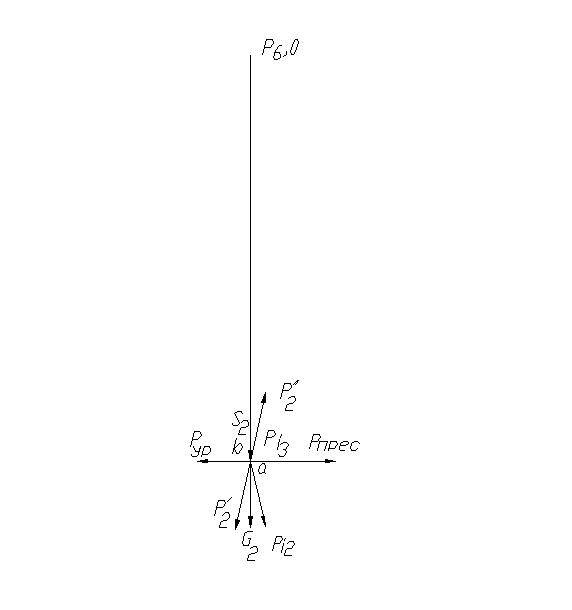
Рисунок 30
9.3 Составляем векторное уравнение
![]()
где hi2 – плече силы Pi2 относительно полюса, мм
Р’2 и P”2 – пары сил, Н
h”2 и h’2 –плечи пары сил, мм
где Mi2=15621232Hм /с.25/
LAB=1.885м /с. 4/

h”2=h’2=21,3мм
[Ра]=97,72мм
hi2=21,5мм
Pi2=16582089H /с.25/
Рпресс=320000Н /с. 4/
Pi3=12166945H /с. 25/

9.4 Сравнение результатов
Полученный результат уравновешенной силы полученный методом рычага Жуковского сравниваем с полученным результатом уравновешенной сила при расчете ведущего звена. Разница этих данных не должна превышать 5%.
 (52)
(52)
где РЖур– уравновешающия сила полученная методом рычага Жуговского, Н
РВЗур– уровновешающия сила полученная при расчете ведущего звена, Н
РВЗур=16136019Н /с. 32/
![]()