

4Вторая задача кинематического анализа
4.1 Определяем скорость ведущего звена
Скорость звена всегда перпендикулярна данному звену и направлена в ту же сторону, что и угловая скорость данного звена.
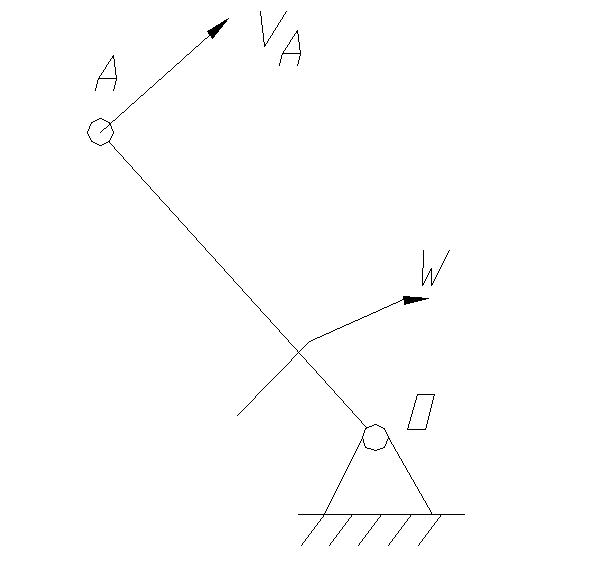
рисунок 6 – скорость ведущего звена
![]() (6)
(6)
где W1 – угловая скорость ведущего звена, с-1
![]() (7)
(7)
где n – частота вращения кривошипа, об/мин
n=2250об/мин /с.2/
![]()
LAO – 0,415м /с.4/
![]()
4.2Определяем масштаб плана скоростей
![]() (8)
(8)
 где
V’A
– отрезок скорости ведущего звена на
плане скоростей, мм
где
V’A
– отрезок скорости ведущего звена на
плане скоростей, мм
V’A=97,72мм
![]()
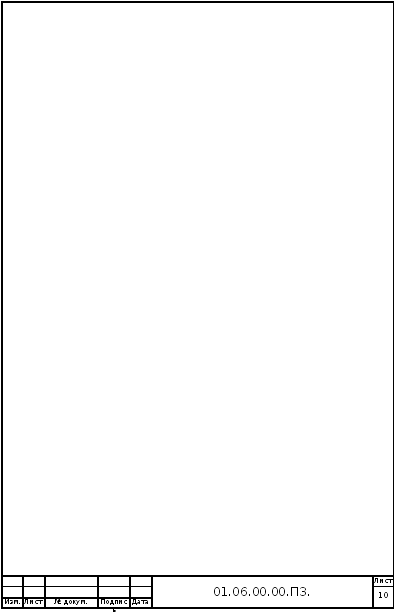
4.3 Определяем скорость группы Ассура для каждого положения
Рисунок 7 – направление скоростей
![]() (9)
(9)
где VBAx – скорость шатуна в х - положении.
Строим восемь планов скоростей.
Для этого на ватмане берем произвольную точку (полюс). Переносим параллельно (в заданном положении механизма) вектор скорости VA, через данную точку. Из полюса откладываем его длину в масштабе на плане cкоростей (рисунок 8).

Рисунок 8 – направление скорости ведущего звена
 В
конец вектора Vа
параллельно переносим вектор VВА,
но направление его мы не знаем. Поэтому
проводим его как в одну, так и в другую
сторону относительно конца вектора Vа
(рисунок 9).
В
конец вектора Vа
параллельно переносим вектор VВА,
но направление его мы не знаем. Поэтому
проводим его как в одну, так и в другую
сторону относительно конца вектора Vа
(рисунок 9).
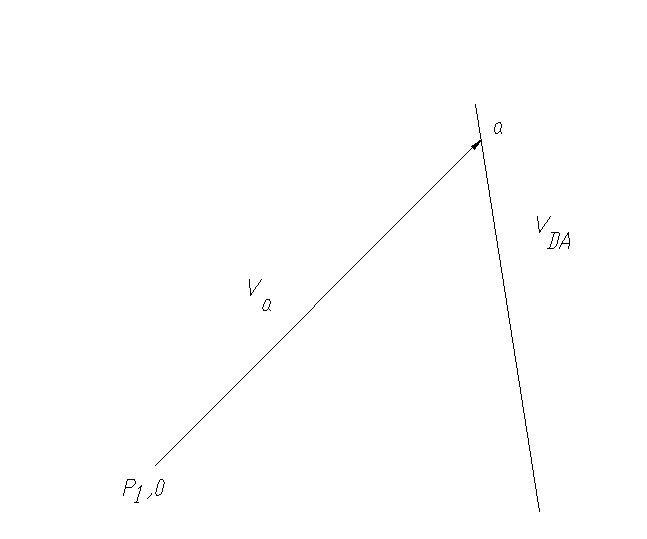
Рисунок 9
Т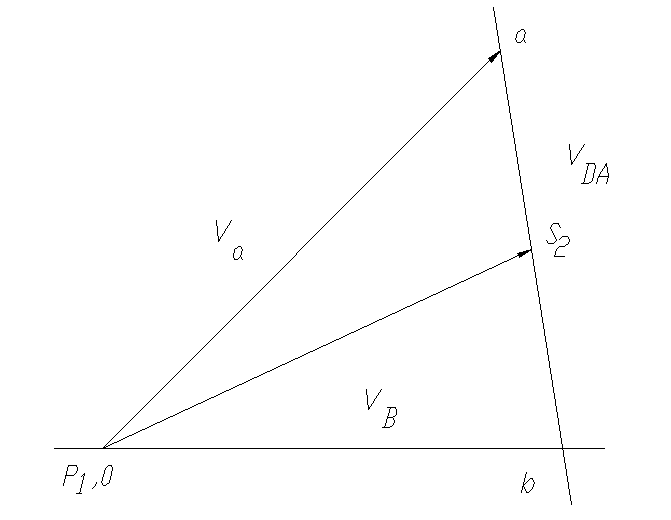 ак
же параллельно переносим векторVB
в полюс, но направление мы также не
знаем. Поэтому проводим его как в одну,
так и в другую сторону. Пересечение
векторов VB
и Vа
даст нам их длины. Указываем направление
векторов VB
и Vа
согласно уравнению (9). Для нахождения
скорости средней точки шатуна S2
нужно провести вектор из полюса к
середине участка ab
(рисунок
10).
ак
же параллельно переносим векторVB
в полюс, но направление мы также не
знаем. Поэтому проводим его как в одну,
так и в другую сторону. Пересечение
векторов VB
и Vа
даст нам их длины. Указываем направление
векторов VB
и Vа
согласно уравнению (9). Для нахождения
скорости средней точки шатуна S2
нужно провести вектор из полюса к
середине участка ab
(рисунок
10).
Рисунок 10
Длина каждого вектора является скоростью для каждого звена.
4.3.1 Определяем скорость ползуна в каждом положении
![]() (10)
(10)
где [P, b]x – длина отрезка P, b для х – положения, мм
V=1м/с/мм /с.9/
4.3.2 Определяем скорость шатуна в каждом положении
![]() (11)
(11)
[a, b]x – длина отрезка a, b для х – положения, мм
4.3.3 Определяем скорость в точке S2 в каждом положении
![]() (12)
(12)
[P, S2]x – длина отрезка P, S2 для х – положения, мм
Числовые значения длин отрезков и скоростей приведены в таблице 1
Таблица 1
|
№ положения |
[P,b], мм |
VB, м/с |
[а,b], мм |
VBA, м/с |
[P,S2], мм |
VS, м/с |
|
1 |
80,03 |
80,03 |
69,95 |
69,95 |
82,18 |
82,18 |
|
2 |
97,72 |
97,72 |
0 |
0 |
97,72 |
97,72 |
|
3 |
58,17 |
58,17 |
69,95 |
69,95 |
72,4 |
72,4 |
|
4 |
0 |
0 |
97,72 |
97,72 |
48,86 |
48,86 |
|
5 |
58,17 |
58,17 |
69,95 |
69,95 |
72,4 |
72,4 |
|
6 |
97,72 |
97,72 |
0 |
0 |
97,72 |
97,72 |
|
7 |
80,03 |
80,03 |
69,95 |
69,95 |
82,18 |
82,18 |
|
8 |
0 |
0 |
97,72 |
97,72 |
48,86 |
48,86 |
4.4 Определяем угловую скорость для шатуна в каждом положении
![]() (13)
(13)
где VBax – скорость шатуна в х – положении, м/с
LАВ=1,885м
Числовые значения угловых скоростей приведены в таблице 2
 Таблица
2
Таблица
2
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
VBA, м/с |
69,95 |
0 |
69,95 |
97,72 |
69,95 |
0 |
69,95 |
97,72 |
|
W2, с-1 |
37,1 |
0 |
37,1 |
51,8 |
37,1 |
0 |
37,1 |
51,8 |