

5 Третья задача кинематического анализа механизма
Относительное ускорение состоит из нормальной и тангенциальной составляющей. Нормальная составляющая относительного ускорения всегда направлена к центру вращения. Тангенциальная составляющая относительного ускорения направлена перпендикулярно звену в сторону углового ускорения.
5.1 Определяем ускорение для ведущего звена
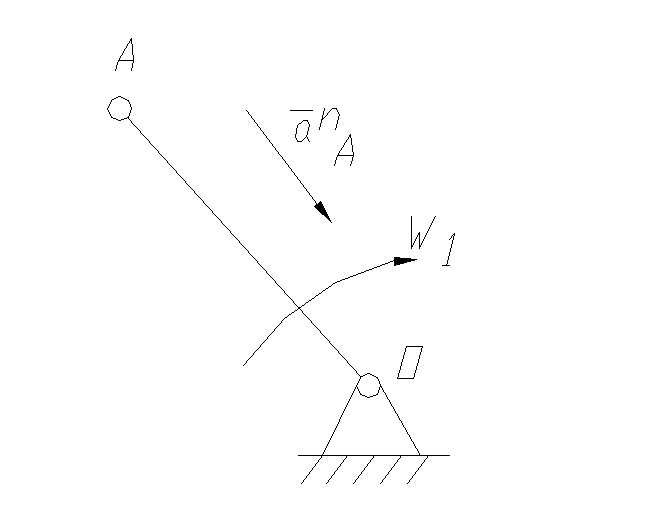
рисунок 11
![]() (14)
(14)
где а0 – ускорение в точке 0, м/с2
аАО – ускорение звена АО, м/с2
а0=0
![]()
![]() (15)
(15)
где аnАО – нормальная составляющая ускорения аАО, м/с2
аАО – тангенциальная составляющая ускорения аАО, м/с2
так как W1=const, то аАО=0
![]()
![]() (16)
(16)
W1=235.5c-1 /с.9/
LAB=0.415м /с.4/
![]()
![]()
 5.2
Определяем ускорение для группы Ассура
в каждом положение
5.2
Определяем ускорение для группы Ассура
в каждом положение

Рисунок 12
![]() (17)
(17)
где аВАх – ускорение звена ВА, м/с2
![]() (18)
(18)
![]() (19)
(19)
где аnBA – нормальная составляющая ускорения аBA, м/с2
аBA – тангенциальная составляющая ускорения аBA, м/с2
![]() (20)
(20)
где W2х – угловая скорость шатуна, с-1 /с.13, табл.2/
LAB=1.885м
Числовые значения приведены в таблице 3
Таблица 3
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
W2, с-1 |
37.1 |
0 |
37.1 |
51.8 |
37.1 |
0 |
37.1 |
51.8 |
|
аnBA, м/с |
2596 |
0 |
2596 |
5058 |
2596 |
0 |
2596 |
5058 |
5.3 Определяем масштаб плана ускорения
![]() (21)
(21)
где а’А – отрезок ускорения ведущего звена на плане ускорения в 1, 3, 5, 7 положениях мм
а’А=115,08мм
![]()
5.4 Определяем размер отрезка нормальной составляющей ускорения аnВа в 1, 3, 5, 7, положениях на плане ускорения
![]() (22)
(22)
где аnВА=2596м/с2 /с.15, табл.3/
![]()
5.5 Определяем размер отрезка нормальной составляющей ускорения аnВа в 4,8 положениях на плане ускорения
аnВА=5058м/с2
![]()
Отрезок аnВА во 2 и 6 положениях равен нулю.
Строим восемь планов ускорения.
Принцип построения плана ускорений такой же, как и у плана скоростей.
На ватмане берем любую точку (полюс). В начале переносим параллельно (в заданном положении механизма) вектор аА через эту точку. Откладываем его длину в масштабе от полюса. В конец вектора аА параллельно переносим вектор аnВА. Откладываем его длину в масштабе от конца вектора аА (Рисунок 13).

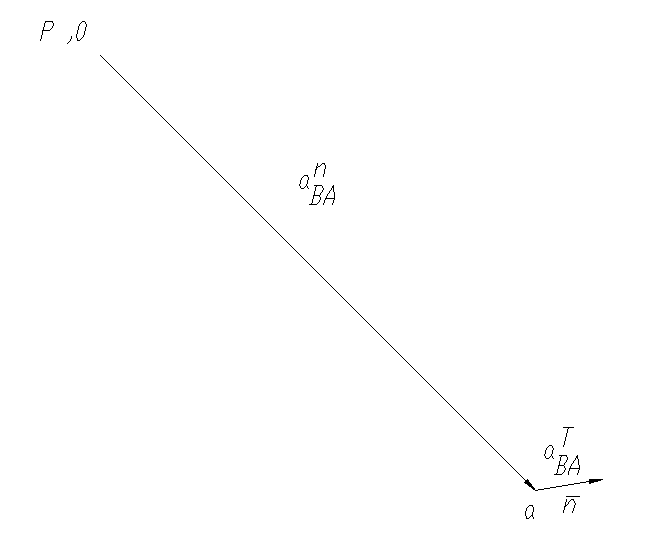
Рисунок 13
В конец вектора аnВА переносим параллельно вектор аВА, но направление мы не знаем. Поэтому проводим этот вектор в обе стороны относительно конца вектора аnВА. В полюсную точку переносим параллельно вектор аВ, но направление его мы также не знаем. Поэтому проводим этот вектор в обе стороны относительно полюса. Пересечение векторов аnВА и аВ дадут нам их длины. Указываем направление аnВА и аВ согласно уравнению. Для нахождения ускорения средней точки Шатуна S2 нужно соединить точки a и b прямой линией и направить вектор ускорения из полюса к середине прямой ab. (рисунок 14).
Отрезок аnВА во 2 и 6 положениях равен нулю. Следовательно вектор аВА будет выходить из конца вектора аА.
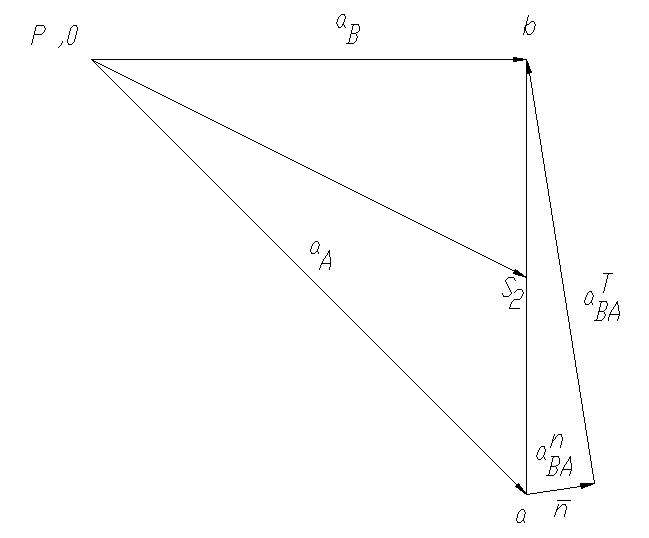
Рисунок 14
5.6 Определяем тангенциальное ускорение шатуна в каждом положении
![]() (23)
(23)
где [] – длина отрезка для х – положения
=200м/с2/мм /с.16/
 5.7
Определяем ускорения ползуна в каждом
положении
5.7
Определяем ускорения ползуна в каждом
положении
![]() (24)
(24)
[P,b]x – длина отрезка Pb для х – положения
5.8 Определяем ускорение в точке S2
![]() (25)
(25)
[P, S2]х – длина отрезка [P, S2] в х – положении
Числовые значения ускорений приведены в таблице 4
Таблица 4
|
№ положения |
[], мм |
аBA м/с2 |
[P,b], мм |
аBA, м/с2 |
[P,S2]мм |
aS2 м/с2 |
|
1 |
80,33 |
16066 |
81,69 |
16338 |
91,12 |
18224 |
|
2 |
117,97 |
23586 |
25,97 |
5194 |
58,99 |
11798 |
|
3 |
80,33 |
16066 |
81,05 |
16210 |
90,74 |
18148 |
|
4 |
0 |
0 |
89,79 |
17958 |
102,3 |
20460 |
|
5 |
80,33 |
16066 |
81,05 |
16210 |
90,74 |
18148 |
|
6 |
117,97 |
23586 |
25,97 |
5194 |
58,99 |
11798 |
|
7 |
80,33 |
16066 |
81,69 |
16338 |
91,12 |
18224 |
|
8 |
0 |
0 |
89,79 |
17958 |
102,3 |
20460 |
5.9 Определяем угловые ускорения для каждого положения
![]() (26)
(26)
аВАх –тангенциальная составляющая ускорения в х –положении, м/с2 /табл.4/
LAB=1,885м /с.4/
Числовые значения углового ускорения приведены в таблице 5
таблице 5
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
аВА м/с2 |
16066 |
23586 |
16066 |
0 |
16066 |
23586 |
16066 |
0 |
|
, с-2 |
8523 |
12512 |
8523 |
0 |
8523 |
12512 |
8523 |
0 |