

26. Контролер пдп.
Intel82237
Центральная задача:
1)КПДП берет на себя функции управления СМ и формирование ША при отключении ЦП от СМ.
2)Осуществляет арбитраж между разными устройствами, запрашивающими режим ПДП.
Классическое периферийное устройство ВУ

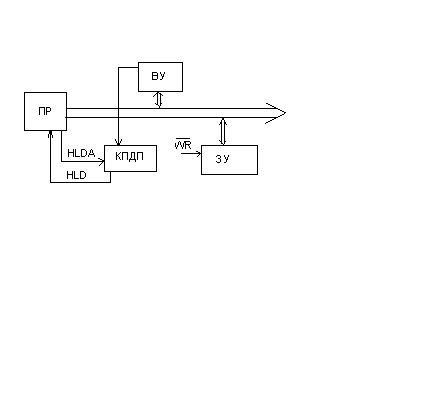
DMR-запрос на ПДП от ВУ,DACK-разрешение на ПДП от ВУ,HLD-запрос от пр-ра,HLDA-разрешение от пр-ра.
Контролер всегда имеет в паре: RDJ0,WR,RD,WRJ0.
Контролер имеет 4 идент. канала К0-К3. Каждый канал содержит 16 разр. регистр адреса и 14 разр. счетчик циклов. По включении питания ЦП в программе нач. пуска (BIOS) прогр-т все периферийные микросхемы, в том числе контролер ПДП. В контролере ПДП проц для каждого канала (ВУ) задает нач. адрес (перв.ячейку памяти запис-ся в РгА канала) и задается число циклов(зап-ся число циклов в канал).Адрес формируется путем инкрементирования РгА (соот-но после каждого цикла число циклов декрементируется). Режим ПДП заканчивается, когда счетчик циклов=0. В этот момент времени формируется сигналTCт.е. последний цикл. Максимальный размер этого блока=16 кбайт, т.к. счетчик циклов 14р, максимальный объем памяти перегоняемый в ПДП=214или 16 кбайт (ПДП не может слишком долго, так как СМ занята и невозможна регенерация динам памяти).
Как контролер ПДП подключается к СМ: STBA-строб адреса.

При программировании контролера использ-ся разряды ША А0÷А3 и CS=0. Помимо прогр-я каждого канала в отдельности запис-ся управл-ее слово(только после того как все каналы запрогр-ся).
Управл-ее слово задает приоритеты между каналами, устанавливается флаги конца цикла ПДП в слове состояния (СС).
ЦП период-ки считывает СС контр-ра ПДП , в котором определяет происходил ли обмен инфой по конкретным каналам (т.е свежая ли проц инф и забран ли от проца готовый предыдущий рез-т). Если цикл ПДП прошел, обмен инфой состоялся, пр-р перепрограммирует контр-р по данному каналу(это делает ОС).
STBAстробирует адрес на ША.
М128-каждый 128 цикл формируется строб, длительностью один цикл.чтобы показать что система не зависла, а идут циклы ПДП.
27. Ппи
Мксх поддержки по мат. плате – группа чипсет. ППИ предн. для подкл. периферийных устройств к СМ.

Все 4 канала независимы друг от друга и могут использ. как на ввод так и на вывод инфы. Порт- совокупность регистра и ШФ. РУС –регистр управляющего слова.
|
|
КАШД |
КВШД |
КСШД |
КА |
КВ |
КС |
РУС |
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
A0 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
|
A1 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
|
|
0 |
0 |
0 |
1 |
1 |
1 |
1 |
|
WRJ0 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |

ППИ может раб-ть в одном из 3 режимов. Режим задается в регистре управляющего слова (РУС).
РУС
|
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
D0-к С1 0-ввод 1- вывод;
D1-к В
D2- задает реж “0” канало С1 и В
D3-к С2 и А
D4-к А (ввод/вывод)
D5D6-номер режима 00-“0” реж 01-первый реж 1х-второй реж
D7-1 признак РУС
Режим “0” предн. для синхронных обменов инфой, каждый из каналов независимо друг от друга может передавать или принимать сигналы в зависимости от РУС.
Режим “1” предн. для асинхронного обмена. В этом режиме данные передаются по каналам А и В, канал С исп-ся для формирования битов квитирования.
Если в режиме 0 или 1 требуется поменять направление передачи инфы ППИ необходимо перепрогр-ть(тратится время). Для скоростного обмена инф-й исп-ся режим 2. В режиме 2 данные могут передаваться только по каналу А. Напр. передачи опред-ся сигналамиRDJO,WRJO.
Порт С используется для формирования битов квитирования. В любом из режимов возм-на побитная установка канала С. В этом случае обращение происходит по адресу упр слова А0А1=1 ат только в РУС старший бит=0 (D7=0).
|
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
D0-то что нужно записатьD3D2D1-двоичный номер разр в кан С.