

36. Применение критерия Раусса для анализа устойчивости дискретной системы
Данный критерий может применяться для дискретных систем, если записать ПФ и характеристическое уравнение системы в виде функции W, используя билинейное преобразование, поскольку границы устойчивости на р-плоскости и w-плоскости совпадают.
Порядок:
1. Проводится билинейное преобразование над Z-передаточной функцией системы
(z
заменяется на
 );
);
2. Составляется характеристическое уравнение системы
![]()
3. Составляется таблица Раусса
Число корней характер-го уравнения, расположенных в правой полуплоскости равно числу перемен знака в первом столбце.
Формулировка: система устойчива, если все элементы 1-го столбца таблицы Раусса имеют одинаковый знак.
37. Применение критерия Гурвица для анализа устойчивости дискретной системы
Данный критерий может применяться для дискретных систем, если записать ПФ и характеристическое уравнение системы в виде функции W, используя билинейное преобразование, поскольку границы устойчивости на р-плоскости и w-плоскости совпадают.
Порядок:
1. Проводится билинейное преобразование над Z-передаточной функцией системы
(z заменяется на );
2. Составляется характеристическое уравнение системы
3. Составляется определитель Гурвица:
Последующие определители образуются из предыдущего вычёркиванием строки и столбца.
Формулировка критерия: для устойчивости системы необходимо и достаточно, что бы 1-й коэффициент уравнения anи все определители Гурвица были положительны.
an>0, ∆n>0
Для
системы 1 порядка:
![]()
Для систем 1-го и 2-го порядка достаточным условием устойчивости является положительность всех коэффициентов характеристического уравнения. Для систем более высокого порядка необходимо вычисление определителей.
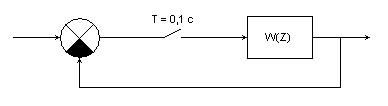
38. Анализ устойчивости дискретной системы с помощью частотных критериев. Критерий Найквиста.
Порядок анализа:
Записываем Z-ПФ разомкнутой системы W(Z);
Выполняем билинейное преобразование и находим W(w).
Подставляем в полученную функцию w = jωw и разделим вещественную и мнимую части, т.е.:
![]()
Задаваясь значениями частоты в диапазоне 0 < ω < ωp/2, где ωp – частота квантования, вычисляем U(ωw), V(ωw).
Строим АФХ разомкнутой системы (кривую Найквиста)
О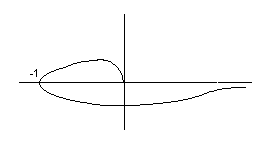 ценку
производим также, как и для непрерывных
систем.
ценку
производим также, как и для непрерывных
систем.
Пример:
1. Выполним билинейное преобразование:
2. Заменяем w на jω:

39. Частотные характеристики импульсных систем.
Если
передаточную функцию разомкнутой
системы представленной в виде
![]() выполнив билинейное преобразование,
то можно построить АЧХ и ФЧХ разомкнутой
системы. С их помощью можно оценить
устойчивость соответствующей замкнутой
системы и при необходимости определить
запас устойчивости. Для этого заменяем
выполнив билинейное преобразование,
то можно построить АЧХ и ФЧХ разомкнутой
системы. С их помощью можно оценить
устойчивость соответствующей замкнутой
системы и при необходимости определить
запас устойчивости. Для этого заменяем
![]() на
на
![]() и получаем
и получаем
![]() - АФХ системы.
- АФХ системы.
 -
АЧХ
-
АЧХ
![]() - ФЧХ
- ФЧХ
Для
построения характеристик задаёмся
значениями
от 0 до
![]() ,
вычисляем
,
вычисляем
 и затем
и
.
и затем
и
.
На практике как и для непрерывных систем обычно строят ассимптотические ЛАЧХ затем, уточняют их с помощью поправок.
Пример:
Система содержит:
интегрирующее звено
апериодическое звено с Т=0,93с.
диф. звено 2-го порядка с
 =0,19с.,
=0,19с.,

Спрягающие частоты

40. Типы коррекции и выбор цифровых корректирующих устройств.
Синтез систем автоматического регулирования заключается в определении параметров регулятора. Соответственно синтез дискретных(импульсных) систем состоит в расчете цифровых регуляторов.
Преимущества цифровых регуляторов:
1.большая гибкость, чем у аналоговых регуляторов, т.е. параметры можно изменять программным методом,
2.цифровой сигнал менее чувствителен к помехам, шумам и т.д.,
3.цифровая обработка производится с высокой точностью и скоростью,
4.легко реализуются в сложные алгоритмы или законы регулирования.
Типы коррекции
а)последовательную коррекцию
П Ф
замкнутой системы
Ф
замкнутой системы
Характеристическое уравнение:
![]()
б )параллельную
коррекцию
)параллельную
коррекцию
В данном случае цифровой регулятор включен в контур местной обратной связью охватывающей часть объекта с передаточной функцией W2(p).
Общий подход к выбору корректирующих устройств.
1.Для повышения статической точности увеличивают коэффициент усиления разомкнутого контура или добавляют полюс z=1.
2.Для повышения быстродействия увеличивают полосу пропускания или полюсы z(p) располагают ближе к началу координат на z-плоскости.
3.Для уменьшения перерегулирования необходимо повышать запас устойчивости.
Корректирующие устройства 1-го порядка
ПФ имеет вид
где z0 и zp- нуль и полюс регулятора.
При использовании частотных методов применяют билинейное преобразование.

где
![]() и
и
![]() -
нуль и полюс регулятора на W-плоскости.
-
нуль и полюс регулятора на W-плоскости.
Коэффициент усиления на нулевой частоте определяется из (1) при z=1 или из (2) при w=0.
В выражении (2) предполагается единичный коэффициент усиления. Для получения не единичного коэффициента необходимо правую часть (2) домножить на соответствующую величину.
После определения и с помощью частотных методов необходимо выполнить обратное преобразование:
 Сравнивая
(3) и (1) находим параметры регулятора
Сравнивая
(3) и (1) находим параметры регулятора

Тип
регулятора определяется соотношением
между
![]() ,
если
,
если
![]() ,
то получаем регулятор с опережением по
фазе.
,
то получаем регулятор с опережением по
фазе.
Соответственно на Z-плоскости, если ноль Z0 расположен ближе к Z=1 чем полюс Zр, то получаем регулятор с опережением по фазе в противном случае с отставанием по фазе.
41. Синтез цифрового регулятора с отставанием по фазе.
Регулятор применяется для повышения запаса устойчивости при неизменной статической точности, либо для увеличения статической точности путем повышения коэффициента усиления при сохранении запаса устойчивости. В обоих случаях уменьшается частот среза системы, а значит ухудшается быстродействие.
ПФ
регулятора
 где
где
![]() .
.
Частотные характеристики
Р ассмотрим
импульсную систему
ассмотрим
импульсную систему

![]()
![]() Для
повышения запаса устойчивости регулятор
должен снижать коэффициент усиления
на частотах, где φ близок к -180о
не оказывает при этом существенного
влияния на сдвиг фаз. Т.о. регулятор
должен уменьшать частоту среза не
изменяя практически сдвиг фаз вблизи
полученной частоты среза.
Для
повышения запаса устойчивости регулятор
должен снижать коэффициент усиления
на частотах, где φ близок к -180о
не оказывает при этом существенного
влияния на сдвиг фаз. Т.о. регулятор
должен уменьшать частоту среза не
изменяя практически сдвиг фаз вблизи
полученной частоты среза.
Для этого должны быть намного меньше желаемой частоты среза системы.
Порядок синтеза
1.добавить к системе усиливаемое звено с коэффициентом Кр, который вычисляется исходя из требований к статической точности,
2.Определяем
желаемую частоту среза, на которой
![]() где
где
![]() -желаемый
запас устойчивости
-желаемый
запас устойчивости
3.Определяем
нуль регулятора, как
![]()
4.Вычисляем
полюсы регулятора
5.Записываем
ПФ регулятора
6.Пересчитываем
функцию
![]() по (4)
по (4)
42.Синтез цифрового регулятора с опережением по фазе.
Регулятор используется для повышения запаса устойчивости при сохранении быстродействия системы, либо для некоторого повышения быстродействия при заданном запасе устойчивости.
ПФ
регулятора
Частотные характеристики
Нуль и полюс регулятора должны располагаться вблизи желаемой частоты среза системы. Можно осуществить расчет методом подбора (последовательных приближений), но для этого нужно много итераций.
Аналитическая процедура синтеза.
П роцедура
синтеза состоит в том, что скорректированная
АФХ должна пройти через точку А, которой
соответствует запас устойчивости
,
этой точке соответствует частота среза
роцедура
синтеза состоит в том, что скорректированная
АФХ должна пройти через точку А, которой
соответствует запас устойчивости
,
этой точке соответствует частота среза
![]() на
на
![]()
При
этом
Коэффициент усиления на нулевой частоте вычисляется из условий статической точности, остальные 2 коэффициента находятся из записанного условия
где
![]() -угол
коррекции вносимый регулятором на
частоте среза.При этом не гарантируется
устойчивость синтезируемой системы,
поэтому необходимо последующая проверка
устойчивости.
-угол
коррекции вносимый регулятором на
частоте среза.При этом не гарантируется
устойчивость синтезируемой системы,
поэтому необходимо последующая проверка
устойчивости.