38 40Режимы работы асутп
Оперативный персонал АСУТП может работать в контуре управления или вне его. При работе в контуре управления оперативный персонал реализует все функции управления или часть их, используя рекомендации по рациональному управлению ТОУ, выработанные КТС. Такой режим функционирования АСУТП называют информационно – соответствующим.
Если оперативный персонал работает вне контура управления, он задает АСУТП режим работы и осуществляет контроль за его соблюдением. В этом случае, в зависимости от состава КТС, АСУТП может функционировать в комбинированном режиме (для обозначения этого режима часто применяют термин «супервизорный»), при котором производится автоматическое изменение уставок и параметров настройки локальных автоматических систем регулирования, или в режиме непосредственного цифрового управления (НЦУ), при котором УВК непосредственно воздействует на исполнительные устройства, изменяя управляющие воздействия на ТОУ.

Рис.2 (продолжение)
в) – ВК выполняет функции непосредственного цифрового управления (НЦУ)
В системе НЦУ сигналы на исполнительные органы поступают непосредственно с ВК. Автоматические системы регулирования сохраняются как резервные элементы, иначе выход из строя ВК может привести к потере управляемости объектом.
В рассматриваемой системе оперативный персонал контролирует работу системы, меняет диапазон допустимого изменения измеряемых величин, имеет доступ к управляющим программам.
22Классификация регуляторов
Автоматические регуляторы классифицируются по способу действия, виду регулирующего воздействия, виду регулируемого параметра, цели и закону регулирования.
По способу действия различают регуляторы прямого и непрямого (косвенного) действия. В регуляторах прямого действия для перемещения регулирующего органа используется энергия самого объекта регулирования. Они применяются в тех случаях, когда для приведения в действие регулирующего органа не нужно больших усилий, а чувствительный элемент обладает необходимой для этого мощностью. В регуляторах непрямого действия энергия для перемещения регулирующего органа подводится от внешнего источника. По виду подводимой энергии регуляторы косвенного действия подразделяются на пневматические, электрические, гидравлические и комбинированные.
По виду регулирующего воздействия различают регуляторы непрерывного и прерывного (дискретного) действия. Регуляторами непрерывного действия называются такие, регулирующий орган которых при непрерывном изменении регулируемого параметра перемещается непрерывно. Регуляторами прерывного действия называются такие, у которых регулирующий орган перемещается только при достижении непрерывно изменяющимся регулируемым параметром определенных заданных значений. К ним относятся релейные и импульсные регуляторы.
По виду регулируемого параметра различают регуляторы температуры, давления, расхода, уровня и др. Конструкция этих регуляторов может быть самой разнообразной, но часто одна и та же конструкция применяется для регулирования различных параметров. Основное различие их заключается в конструкции чувствительного элемента. По цели регулирования различают регуляторы стабилизирующие, программные, следящие и оптимизирующие. Они различаются конструкцией задающего устройства. Стабилизирующие регуляторы имеют настройку на постоянную заданную величину, перенастройка на другой режим осуществляется вручную. Стабилизирующие регуляторы нашли широкое применение в пищевой промышленности. В программных регуляторах настройка меняется по заданной программе, определяемой ходом технологического процесса, при помощи специальных программных задатчиков.
В следящих регуляторах настройка изменяется произвольно по неизвестному заранее закону. Оптимизирующие регуляторы имеют специальное кибернетическое устройство, которое в зависимости от изменения внешних факторов вычисляет оптимальное значение регулируемого параметра и затем автоматически изменяет настройку на это оптимальное значение.
По закону регулирования различают регуляторы позиционные (Пз-регуляторы); пропорциональные, статические (П-регу-ляторы), интегральные, астатические (И-регуляторы); пропорционально-интегральные, изодромные (ПИ-регуляторы); пропорционально-дифференциальные (ПД-регуляторы); пропорционально-интегрально-дифференциальные, изодромные с предварением (ПИД-регуляторы). В зависимости от вида подводимой энергии регуляторы могут быть электрическими, пневматическими, гидравлическими и комбинированными.
25
Расходомеры постоянного перепада
давленияНаиболее
распространенными расходомерами
постоянного перепада давления являются
ротаметры. Они широко используются в
винодельческом, спиртовом, ликерно-водочном,
масло-жировом и других производствах.
Принцип действия ротаметров основан
на вертикальном перемещении поплавка,
находящегося внутри конической трубки,
под воздействием проходящего снизу
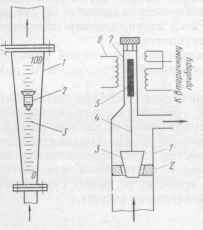
вверх потока измеряемой среды.На рис.
5-6 показана схема стеклянного поплавкового
ротаметра, представляющего собой
вертикально расположенную стеклянную
трубку /, расширяющуюся кверху, внутри
которой находится поплавок 2,
свободно
плавающий в потоке. Протекающий снизу
вверх поток поднимает поплавок До тех
пор, пока кольцевая щель между стенками
конусной трубки и поплавком не достигнет
величины, при которой действующие на
поплавок силы уравновешиваются. В этот
момент поплавок устанавливается на той
или иной высоте в зависимости от величины
расхода.Объемный расход вещества,
протекающего через ротаметр, определяется
по формуле
![]() (где
а-коэффициент расхода; FT-
площадь поперечного сечениятрубки,
соответствующая подъему поплавка па
определеннуювысоту, м2;
F
-
площадь лобовой поверхности поплавка,
м2;рплотность
вещества, кг/м3;
АР
-
перепад давления над поплавком и под
ним, Па). Из этой формулы следует, что
при постоянном значении всех величин,
кроме Ft,
расход
определяется по высоте подъема поплавка.
Эта высота в простейших стеклянных
ротаметрах определяется визуально по
положению верхней плоскости поплавка.
Для отсчета на внешней поверхности
трубки нанесена равномерная шкала 3,
отградуированная
в единицах объема. Ротаметры со стеклянной
трубкой изготовляются на давление
жидкости или газа, не превышающее 0,6
МПа. В технологических процессах пищевых
производств используются выпускавшиеся
ранее ротаметры типов РС-ЗА, РС-3, РС-5,
РС-7, замененные ротаметрами РМ.
(где
а-коэффициент расхода; FT-
площадь поперечного сечениятрубки,
соответствующая подъему поплавка па
определеннуювысоту, м2;
F
-
площадь лобовой поверхности поплавка,
м2;рплотность
вещества, кг/м3;
АР
-
перепад давления над поплавком и под
ним, Па). Из этой формулы следует, что
при постоянном значении всех величин,
кроме Ft,
расход
определяется по высоте подъема поплавка.
Эта высота в простейших стеклянных
ротаметрах определяется визуально по
положению верхней плоскости поплавка.
Для отсчета на внешней поверхности
трубки нанесена равномерная шкала 3,
отградуированная
в единицах объема. Ротаметры со стеклянной
трубкой изготовляются на давление
жидкости или газа, не превышающее 0,6
МПа. В технологических процессах пищевых
производств используются выпускавшиеся
ранее ротаметры типов РС-ЗА, РС-3, РС-5,
РС-7, замененные ротаметрами РМ.
В пищевой промышленности применяются также ротаметры с электрической и пневматической системой дистанционной передачи показаний.Ротаметр с дистанционной электрической передачей типа РЭД (рис. 5-7) состоит из металлического корпуса 1 с диафрагмой 2, в отверстии которой перемещается поплавок 3, жестко соединенный со штоком 4. Сердечник 5, насаженный на верхнем конце штока, находится внутри разделительной трубки 7, окруженной катушкой 6, которая включена в дифференциально-трансформаторную схему вторичного электрического прибора.Ротаметры с пневматической дистанционной передачей состоят из двух основных частей: собственно ротаметра, устроенного аналогично ротаметру, показанному на рис. 5-7, и механизма пневматической дистанционной передачи, включающего пневмопреобразователь и узел обратной связи (см. рис. 2-4).
Ротаметры с дистанционной передачей показаний рассчитаны на рабочее давление до 6,27 МПа. Пределы измерения расходов (в расчете на воду) от 0,44-Ю-4 до 0,44-Ю-2 м3/с-Основная погрешность преобразователя и вторичного прибора ±2,5-3%.
Рис. 5-7. Схема ротаметра с электрической дистанционной передачей