

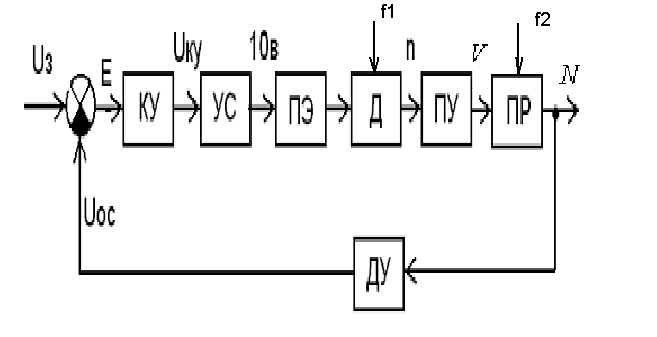
2.Определение структуры основного контура системы
Схема взаимодействия электропривода и процесса резания
Pzz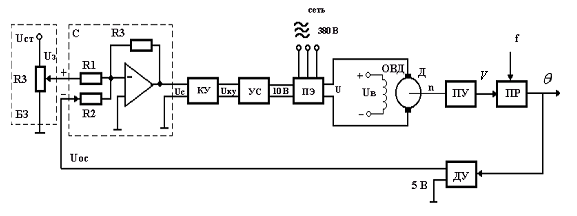
 САР
регулирует выходную координату процесса
резания с заданной точностью. Процесс
резания на схеме обозначен функциональным
блоком ПР, управляющая координата ПР
обозначена V,
возмущающее воздействие f.
Передаточное устройство – это механическая
система, преобразующая механическую
энергию вала двигателя в механическую
энергию управляющего воздействия
процессом резания. ПУ является линейным
звеном. С точки зрения динамики, является
апериодическим звеном первого порядка
с постоянной времени ТПУ.
Двигатель Д преобразует электрическую
энергию в механическую энергию вращения
вала. Двигатель является машиной
постоянного тока с независимым
возбуждением. Возбуждение машины
осуществляется обмоткой ОВД. Поток
возбуждения в процессе регулирования
не изменяется и остается равным его
номинальному значению. Регулирование
скорости двигателя осуществляется
изменением напряжения якоря U.
САР
регулирует выходную координату процесса
резания с заданной точностью. Процесс
резания на схеме обозначен функциональным
блоком ПР, управляющая координата ПР
обозначена V,
возмущающее воздействие f.
Передаточное устройство – это механическая
система, преобразующая механическую
энергию вала двигателя в механическую
энергию управляющего воздействия
процессом резания. ПУ является линейным
звеном. С точки зрения динамики, является
апериодическим звеном первого порядка
с постоянной времени ТПУ.
Двигатель Д преобразует электрическую
энергию в механическую энергию вращения
вала. Двигатель является машиной
постоянного тока с независимым
возбуждением. Возбуждение машины
осуществляется обмоткой ОВД. Поток
возбуждения в процессе регулирования
не изменяется и остается равным его
номинальному значению. Регулирование
скорости двигателя осуществляется
изменением напряжения якоря U.
Преобразователь электрической энергии (ПЭ) преобразует электрическую энергию промышленной сети трехфазного переменного тока в электрическую энергию постоянного тока и регулирует величину выходного напряжения U, питающего цепь якоря двигателя Д. Преобразователь энергии является линейным звеном. Выходное напряжение U равно номинальному значению при напряжении управления 10 В. С точки зрения динамики процесса ПЭ представляет собой апериодическое звено второго порядка с постоянными времени Т1 и Т2.
УС - усилитель, является безынерционным звеном, усиливает напряжение, поступающее от корректирующего устройства.
КУ - корректирующее устройство. Корректирующее устройство корректирует динамические свойства САР. Статический коэффициент передачи КУ равен 1.
БЗ - блок задания, состоящий из источника стабилизированного напряжения и резистора R3, задает напряжение Uз величина которого определяет величину задания выходной координаты САР.
ДУ - измерительная система выходной координаты процесса резания, например, термопара. Представляет собой апериодическое звено первого порядка с постоянной времени ТДУ. При номинальном значении выходной координаты выдаёт напряжение Uос=5 В.
С - сумматор на базе операционного усилителя, безынерционное звено с коэффициентом передачи равным 1. суммирование осуществляется по алгоритму Uс=Uз-Uос.
Pzz Ф
Ф
3.Определение математической модели оу и управляющего устройства основного контура
Для заданной пары инструментальный и обрабатываемый материал выбираем значения коэффициентов и показателей степени: CN=0.59
Режим резания: Vном=30 мм/мин, S=0.5 мм/об, t=0.3 мм
В данной системе необходимо стабилизировать силу резания на уровне РZ=200 Н.
Паспортные данные двигателя.
Тип 2ПН132LУХА4
Мощность, P 14,кВт
Напряжение, U 220,В
Номинальная частота вращения, n 3150,об/мин
КПД 86%
Cопротивление обмотки якоря 0,08,Ом
Индуктивность цепи якоря 3,5,мГн
Момент инерции 0,048,кг*м2
Постоянная времени, Тду 0,с
Постоянная времени,Тпу 0,с
Преобразователь электрической энергии:
Постоянные времени
Звено 1, Т1 0,142,с
Звено 2, Т2 0,341,с
Преобразователь энергии
С точки зрения динамики процесса преобразователь энергии является апериодическим звеном второго порядка. Его передаточная функция:
![]()
Значение постоянных времени T1 и T2 известны, а значение коэффициента передачи найдем из условия номинального значения напряжения якоря двигателя:
![]() .
.
Двигатель
Согласно системе уравнений
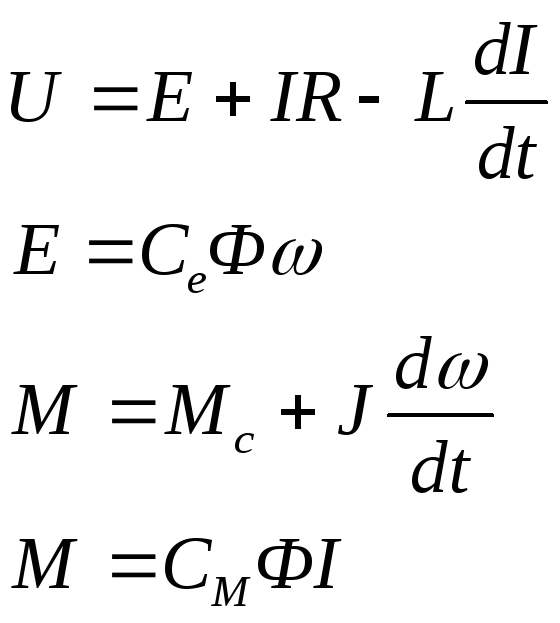
IЯ – ток в обмотке якоря
PН – номинальная мощность двигателя
UН – номинальное напряжение на обмотке якоря
J – момент инерции двигателя
RЯ – сопротивление обмотки якоря
nНОМ – номинальная частота вращения
wН – номинальная угловая скорость вращения
LЯ – индуктивность цепи якоря
Ф – поток возбуждения двигателя
СМ,СЕ – конструктивные коэффициенты
Двигатель
можно представить в виде следующей
схемы: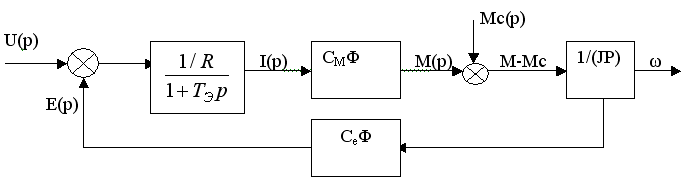
Расчёт механической и электромеханической характеристик двигателя постоянного тока с независимым возбуждением.
По исходным данным двигателя 2ПН132МУХЛ4 рассчитаем параметры его
механической и электромеханической характеристик.
![]() ,
,
Ce, Сm-конструктивные параметры двигателя,
Ф-поток возбуждения
 ,
,
Рассчитаем номинальный режим работы двигателя:
 ,
,
где
![]() - номинальная частота вращения двигателя.
- номинальная частота вращения двигателя.
![]()
Iн- сила тока, протекающего через якорь двигателя,
Uн- напряжение на якоре двигателя,
Rя - сопротивление якоря.
 ,
где
,
где
![]() - КПД двигателя.
- КПД двигателя.
![]() -
номинальная ЭДС
-
номинальная ЭДС
 .
.
 ,
,
Мн – момент на валу двигателя,
![]() -
номинальная мощность двигателя.
-
номинальная мощность двигателя.
 .
.